
![]()


- Upload mower firmware over gateway webportal;
- Change gateway IP range so WiFi controller is accesible over the "home" network;
BaseNow replaced by https://github.com/ldab/esp-gateway-long-range- Mower
flowchart LR
A(Point Perfect) -- SPARTN --> B(Thingstream Broker)
B <-- MQTT --> C(nora-w1)
C -- SPARTN --> D(ZED-F9P)
C -- keys --> D(ZED-F9P)
D -- Position --> C

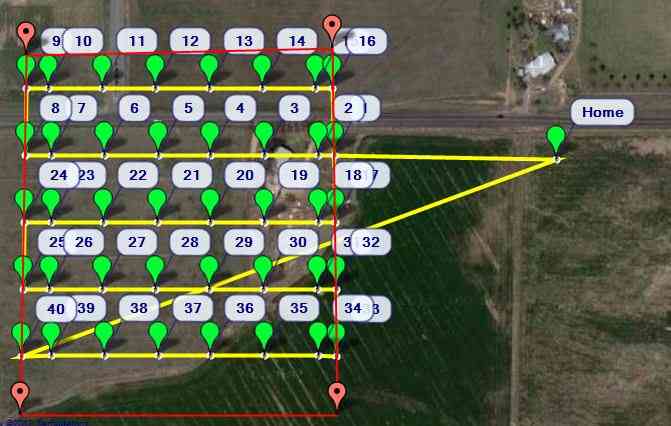
Use [Mission Planner](Mission Planner: https://ardupilot.org/planner/#) in order to rout the area to be covered:
File format is:
QGC WPL <VERSION>\r\n
<INDEX>\t<CURRENT WP>\t<COORD FRAME>\t<COMMAND>\t<PARAM1>\t<PARAM2>\t<PARAM3>\t<PARAM4>\t<PARAM5/X/LATITUDE>\t<PARAM6/Y/LONGITUDE>\t<PARAM7/Z/ALTITUDE>\t<AUTOCONTINUE>\r\n
https://mavlink.io/en/file_formats/
Commercial units goes 16-18 m/min (), and has 205mm diameter
You can go crazy about the numbers Required Power and Torque, but I go like this:
We have 2x motors so ~7.5Nm should be alright.
Blade seems to run at 3500RPM
- Board definition: https://github.com/platformio/platform-espressif32/blob/master/boards/esp32-s3-devkitc-1.json
- Circle distance between two points: https://en.wikipedia.org/wiki/Haversine_formula
- Mars Rover: https://github.com/jakkra/Mars-Rover
- Badges by shields.io