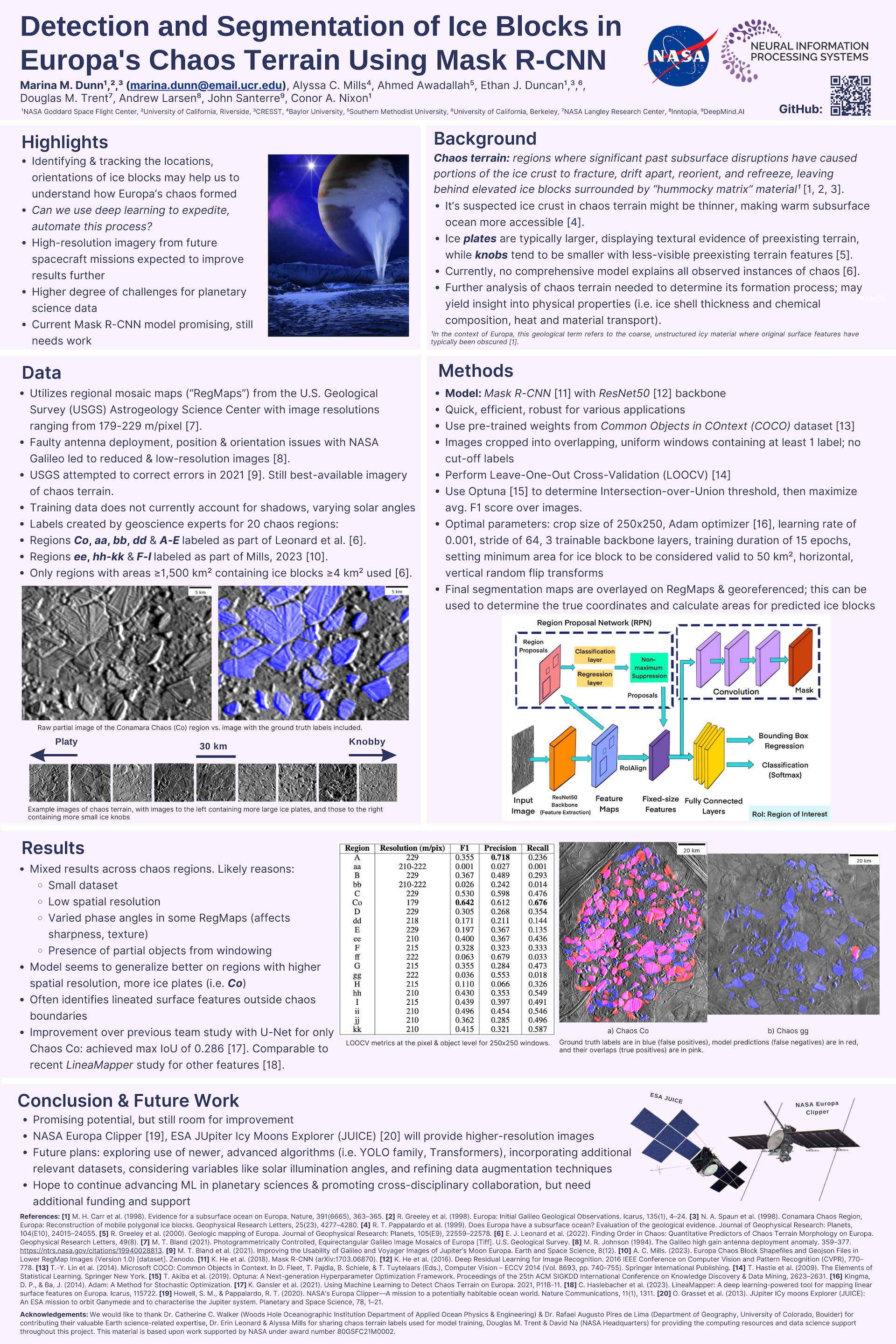
This project aims to develop a deep learning model for performing instance segmentation for ice blocks in chaos terrain regions of Europa. The model uses georeferenced labels created from corrected imagery of NASA’s Galileo Solid State Imager (SSI) to train a Mask Region-based Convolutional Neural Network (Mask R-CNN).
The project utilizes imaging data from regional image mosaic maps ("RegMaps") produced by NASA's Galileo Solid State Imager (SSI) and photogrammetrically corrected by the USGS Astrogeology Science Center as part of Bland et al. 2021.
The data for each chaos region can be found in the data directory. Smaller image and mask tiles generated as part of the hyperparameter search process are stored in a new directory processed_data, and are sorted into training and testing subsets (img_train, img_test, lbl_train, lbl_test).
| Region | Mosaic ID | Resolution (m/pixel) | Leading/Trailing Hemisphere |
|---|---|---|---|
| A | 15ESREGMAP02 | 229 | Leading |
| aa | 17ESREGMAP01, 17ESNERTRM01, 11ESREGMAP01 | 210, 218, 222 | Trailing |
| B | 15ESREGMAP02 | 229 | Leading |
| bb | 17ESREGMAP01, 17ESNERTRM01, 11ESREGMAP01 | 210, 218, 222 | Trailing |
| C | 15ESREGMAP02 | 229 | Leading |
| Co | E6ESDRKLIN01 | 179 | Trailing |
| D | 15ESREGMAP02 | 229 | Leading |
| dd | 11ESREGMAP01 | 218 | Trailing |
| E | 15ESREGMAP02 | 229 | Leading |
| ee | 17ESNERTRM01 | 210 | Trailing |
| F | 17ESREGMAP02 | 215 | Leading |
| ff | 17ESREGMAP01 | 222 | Trailing |
| G | 17ESREGMAP02 | 215 | Leading |
| gg | 17ESREGMAP01 | 222 | Trailing |
| H | 17ESREGMAP02 | 215 | Leading |
| hh | 17ESNERTRM01 | 210 | Trailing |
| I | 17ESREGMAP02 | 215 | Leading |
| ii | 17ESNERTRM01 | 210 | Trailing |
| jj | 17ESNERTRM01 | 210 | Trailing |
| kk | 17ESNERTRM01 | 210 | Trailing |
The labels used for model training are created by Alyssa C. Mills and are available publicly on Zenodo. These labels were created using the same conventions as Leonard et al. 2022, but with corrected USGS imagery.
Our current setup leverages a Mask R-CNN model framework, with a ResNet50 backbone, and uses pre-trained weights from the Common Objects in COntext (COCO) dataset to perform transfer learning.
Final trained models and their weights can be found in the models directory.
The directory examples includes the following:
reproject.py: example script for reprojecting RegMap GeoTIFF images to the same CRS as the chaos GeoJSON filespixel_metrics_example: example script for making predictions and calculating pixel-level metrics for an image.maskfromcoco.ipynb: example notebook for how to create segmentation masks from COCO-formatted labels.
All test code and resulting plots can be found in the tests directory.
A hyperparameter search is conducted using the Optuna framework, and can be found in src/optuna_main.py. The search aims to maximize the segmentation IoU score across images in a dataset during optimization. The default Tree-structured Parzen Estimator (TPE), a form of Bayesian Optimization, is used as the sampler in order to perform a more efficient search.
To run a search, modify the hyperparameters within the selected objective function in src/utils/optuna_utility/objectives.py then run python3 src/optuna_main.py -m [metric], where "metric" is either "f1", "precision", or "recall". The best results from this are saved in the output/optuna_output directory.
The files containing the best model results can be found in the output directory, and corresponding plots can be found in the plots directory.
Current branch: main
Project Repository Structure:
europa-chaos-ML/
├── archive
├── data
│ ├── Chaos_[X]/
│ ├── image/
│ ├── label/
│ ├── geojson/
│ ├── processed_data/
│ ├── size_distributions/
├── deps/
├── examples/
├── models/
│ ├── model_weights/
├── plots/
├── src/
│ ├── model_objects/
│ ├── utils/
├── tests/
├── README.md
- Clone Repository:
git clone https://github.com/marinadunn/europa-chaos-ML.git
cd europa-chaos-ML
- Set Up a New Python Virtual Environment and Install Dependencies
It is recommended to create a new Python environment before installing packages and running the pipeline. All necessary dependencies can be found in the deps directory.
To run on a machine with CUDA GPU capability, use the run the following commands in a terminal:
conda create --name [envname]
conda activate [envname]
pip3 install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu116
pip3 install -r deps/requirements.txt
python3 -m ipykernel install --user --name [envname]
If running specifically on an internal NASA science-managed cloud environment, which has CUDA GPU capability, run the following commands in a terminal:
conda create --name [envname]
conda activate [envname]
pip3 install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu116
pip3 install -r deps/requirements_nasa.txt
python3 -m ipykernel install --user --name [envname]
- (Optional) Perform Hyperparameter Search with Optuna
To run a hyperparameter search with optuna, run the following commands in a terminal to execute the Python script with the desired options:
cd src
python3 optuna_main.py [metric option]
Options include:
--metric(str): Which metric to use for optuna hyperparameter optimization. Options currently include f1, precision, or recall. (Required)
Running Leave-One-Out Cross-Validation (LOOCV):
All source code can be found in the src directory. To perform the same LOOCV experiment setup currently described in our paper/poster, run the following commands in a terminal to execute the Python script:
cd src
python3 cross_val.py
Prior notebooks that were created during the development process, but are no longer being used, are located in the archive directory. This includes model development code for non-georeferenced labels, created with the 'LabelMe' tool.
- Marina M. Dunn (marina.dunn@email.ucr.edu)
- Alyssa C. Mills (alyssa_mills1@baylor.edu)
- Ahmed Awadallah (ahmed.d8k8@gmail.com)
- Ethan J. Duncan (ejduncan@asu.edu)
- Douglas M. Trent (douglas.m.trent@nasa.gov)
- Andrew Larsen (drewlarsen27@gmail.com)
- John Santerre (john.santerre@gmail.com)
- Conor A. Nixon (conor.a.nixon@nasa.gov)
We would like to thank Dr. Catherine C. Walker (Woods Hole Oceanographic Institution Department of Applied Ocean Physics and Engineering) and Dr. Rafael Augusto Pires de Lima (Department of Geography, University of Colorado, Boulder) for contributing their valuable Earth science-related expertise. We also thank Dr. Erin Leonard and Alyssa C. Mills for sharing chaos terrain labels used for model training, and Douglas M. Trent and David Na (NASA Headquarters) for providing the computing resources and data science support throughout this project. This material is based upon work supported by NASA under award number 80GSFC21M0002.
If you use this code, please cite our NeurIPS ML4PS Workshop paper. NeurIPS ML4PS Workshop Poster.
{kind=link}