Modelling Systems Based on ODP: Configuration
SafetySharp.Odp supports different methods of (re-)configuring the system for the execution of its tasks. These methods are:
- centralized or distributed – they either require a central component with global knowledge, and affect the entire system; or they work on a local basis, without a central component.
- direct or indirect: they either modify the agents' configuration directly, ignoring the communication necessary to do so in the real world; or they are based on reconfiguration agents and include their communication explicitly.
These methods are represented by the IReconfigurationStrategy interface. The following diagram shows its implementations and the related types:
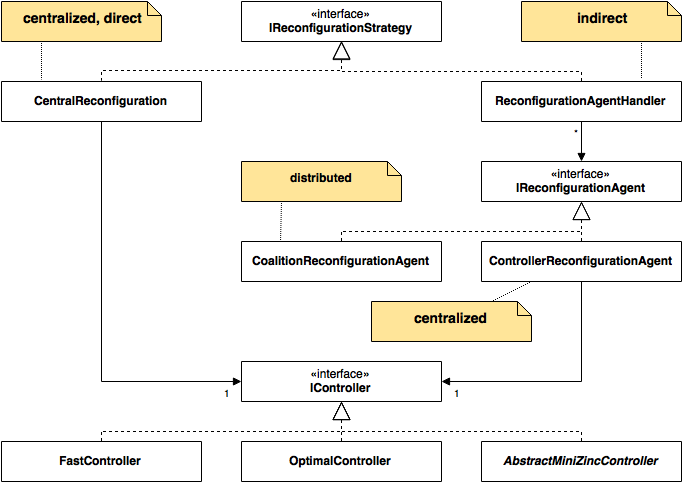
There are thus the following reconfiguration techniques:
| centralized | distributed | |
|---|---|---|
| direct | CentralReconfiguration |
N/A |
| indirect |
ReconfigurationAgentHandler, using ControllerReconfigurationAgents |
ReconfigurationAgentHandler, using CoalitionReconfigurationAgents |
When using a centralized technique, there are also 3 choices of algorithms (implementations of IController) which can be used:
-
FastController– a native solution which uses the first configuration it finds -
OptimalController– a native solution which calculates all possible configurations and chooses the optimal configuration, based on a cost function -
AbstractMiniZincController– uses the MiniZinc constraint solver to find a configuration (to use this, a MiniZinc constraint model must be developed, and one simple abstract method must be implemented in a subclass)