- 임베디드 시스템에서 구동되는 다양한 어플리케이션이 많은 관심을 보이며, 특히 CPU 및 GPU를 갖는 Nvidia사에서 생산판매하고 있는 Jetson 보드가 가장 일반적으로 사용되고 있습니다.
- 때문에 GPU가 설치되어 있어 고성능 AI 어플리케이션의 구동이 가능한 Jetson 보드와 라즈베리파이를 사용하여 로봇 제어기술인 ROS를 사용하여 AI와 ROS를 결합한 작품을 개발하고자 합니다.
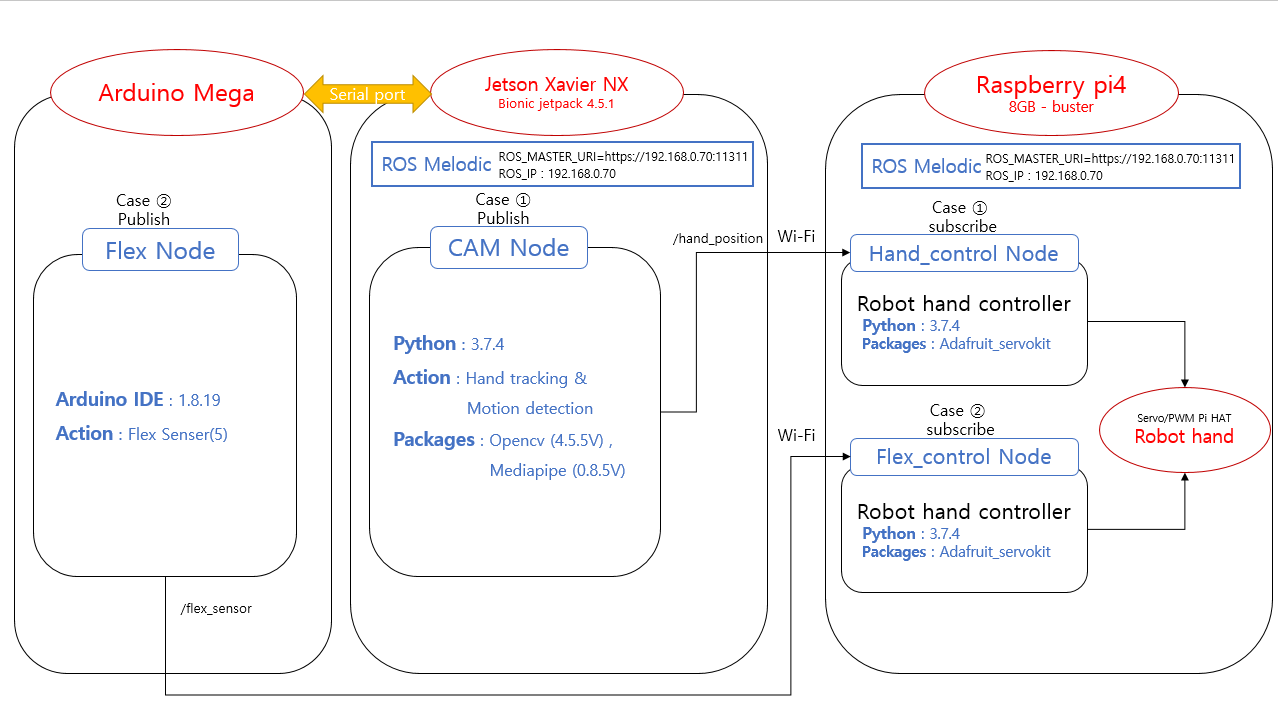
- Jetson Xavier Nx에서 Ros Melodic을 사용하여 cam node에서 HandPosition Topic을 hand control node로 publish
- Raspberry Pi의 hand control node는 cam node에서 subscribe한 모션검출결과를 수행시켜 로봇핸드를 동작
- Jetson Xavier Nx에서 Ros Melodic을 사용하여 Flex Sensor의 데이터를 Flex node 로 Publish
- Raspberry pi의 Flex control node는 Flex node에서 subscribe한 각도로 로봇핸드를 동작
- Jetson Xavier Nx에 연결된 usb 카메라로 영상 인식 및 데이터 가공
- Ros로 Raspberry pi4로 데이터 전송
- Raspberry pi4에 연결한 Arduino Hat을 이용하여 Robot Hand 동작
- Jetson Xavier Nx에 연결된 Arduino Mega2560의 Felx Sensor의 데이터 가공
- Ros로 Raspberry pi4로 데이터 전송
- Raspberry pi4에 연결한 Arduino Hat을 이용하여 Robot Hand 동작