
Work in Progress!
The MotorThing is a WiFi bridge for Trinamic TMCL (Trinamic Motion Control Language) products, such as the TMCM-1110 'StepRocker' board or PANdrive motors.
TMCL instructions can be sent using a simple HTTP JSON interface. A serial interface (RS-485) is used to communicate with the TMCL module.
Our first application is "Shoot-Move-Shoot" timelapse video, controlled by a mobile web application.


MotorThing requires an ESP8266 MCU and a TMCL enabled stepper motor controller.
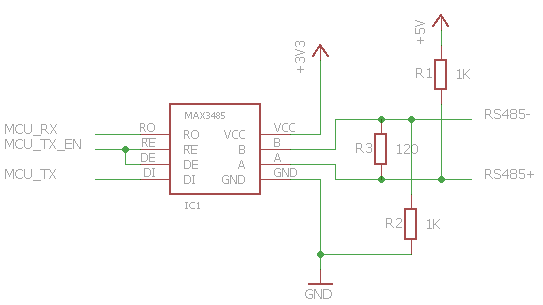
To connect to the TMCL module, an RS-485 transceiver (MAX3485 or similar) is used. This transceiver needs three GPIO pins for Software Serial (RX, TX and Transmit-Enable), so make sure your ESP8266 has them.
The following schematic show how to connect the MAX348x to the RS-485 bus. The pull-up and pull-down resistors R1 and R2 (1k) are required somwehere on the bus (but only once), otherwise it will produce communication errors when it is floating.
The termination resistor R3 (120) is required at both ends of the bus.
This project uses the PlatformIO build system. You can use the command line tools or their IDE (recommended) to build and upload the firmware.
Usually it boils down to a single command:
# Compile and upload to the ESP8266 / nodeMCU
platformio run -t uploadPlease refer to the available PlatformIO Documentation for details on how to use it.
The project includes an environment definition for the nodeMCU v2 board, you might need to adjust this if you use a different ESP8266 board (see
platformio.ini).
Building the webapp requires multiple steps.
- First Source files from
src/weband their dependencies are concatenated (JavaScript and CSS) and minified. - Then, unique short filenames are derived using a content hash. This is necessary to work around the 32-character limit for filenames in the embedded SPIFFS filesystem, and also has the advantage that these files can be cached forever.
- The resulting files are compressed using gzip to save space
- Finally, the SPIFFS filesystem is built and uploaded to the ESP8266.
The build process uses npm and Gulp, so you will need to install them once.
# Install node.js distribution (this includes npm)
# Install Gulp CLI - This needs to be done only once
npm install -g gulp-cli
# Build everything & Upload it to the ESP8266
# The initial run can take a while as npm will download dependencies
platformio run -t uploadfs
# You can also test the webapp in a local browser
gulp webserverWe are currently building a 512k SPIFFS filesystem, which means you need at least 1M flash on your ESP8266 module.
You can automatically download a binary TMCL program to the module each time the MCU boots. Binary TMCL programs can be created using the Trinamic TMCL-IDE.
To use this feature, place the compiled program in data/tmcl.bin and run the command
platformio run -t uploadfs.
Warning: This is potentially dangerous and has not been tested much. Use at your own risk.
That being said, it seems almost impossible to brick a TMCL module. If the module is "stuck" after a failed download, cycle power and try again.

The Web API endpoint is http://<ip>/tmcl. It supports two methods, GET
and POST.
You can communicate with multiple modules by specifying an address attribute
(for POST/JSON requests) or request parameter (for GET and PUT requests).
All replies contain the address attribute of the module that replied.
If no address is specified, the default address 1 is used.
GET /tmcl[?address=<address>] will get the module version and return it as a JSON object.
{
"address": <address>,
"version": "<version>"
}
POST /tmcl will execute a TMCL instruction, specified as JSON object:
POST /tmcl
{
"address": <address>,
"instruction": <instruction>,
"type": <type>,
"motor": <motor>,
"value": <value>
}
The "instruction" attribute is mandatory, all other attributes are optional
and default to 0 or 1 for the address attribute.
The response contains the TMCL reply as a JSON object:
{
"address": <address>,
"status": <status>,
"instruction": <instruction>,
"value": <value>
}
In some cases, an HTTP error status will be sent:
- If there is a timeout in the TMCL communication, HTTP status
504(Gateway Timeout) will be sent. - If there is a checksum error in the TMCL telegram, HTTP status
502(Bad Gateway) will be sent. - If the request is malformed, HTTP status
400is sent.
In addition, the TMCL reply "status" attribute might contain an error code
(100 means success).
Please refer to the TMCL Documentation for information on available instructions and their parameters.
PUT /tmcl[?address=<address>] will download a binary TMCL program to the module's EEPROM.
Binary TMCL programs can be created using the Trinamic TMCL-IDE.
Use a multipart/form-data file upload to send the binary file.
If there is an error, HTTP status 500 will be sent.
Warning: This is potentially dangerous and has not been tested much. Use at your own risk.
That being said, it seems almost impossible to brick a TMCL module. If the module is "stuck" after a failed download, cycle power and try again.
Request:
GET http://<ip>/tmcl
Response:
{
"address": 1,
"version": "110V3.40"
}Request:
POST http://<ip>/tmcl
{
"instruction": 1,
"value": 100
}Response:
{
"address": 1,
"status": 100,
"instruction": 1,
"value": 100
}Request:
POST http://<ip>/tmcl
{
"instruction": 6,
"type": 1
}Response:
{
"address": 1,
"status": 100,
"instruction": 6,
"value": 2099833
}