Hardware and Software description for a sensorless BLDC Controller
Please be careful: the controller is not yet fully tested and still requires development.
Hardware is designed with Altium Designer, source files are available in "Hardware" folder. Software is written for dsPIC30F3011 in MPLABX IDE and is available in "Software" folder. The Controller is currently tested on Turnigy D2836/8 1100kv motor.
- Current: 80A
- Voltage: 10 to 20V (3S, 4S, and 5S Lipo)
- Power dissipation without heatsink : 300W
- Speed setpoint set with PWM signal
- SPI 3 wires communication : an other board with MCU can access some informations (real motor speed, current consumption, etc ...)
- Firmware based on dsPIC30F3011
- Cycle frequency : 29 491 200 Hz (7.3728 MHz crystal with PLL 16x)
- Median filter to avoid command reading error
Crystal use instead of internal oscillator (as it's generally made on ESC) ensures a high precision reading of the speed setpoint coming from the PWM signal.
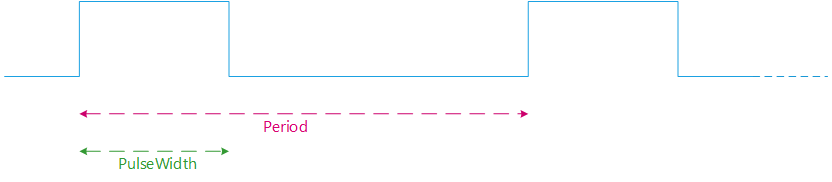

In the equation above, Speed and MaxMotorSpeed are given in RPM (Revolutions per Minute), PulseWidth and MaxPulseWidth in µs (microseconde).
Period should be 25% greater than MaxPulseWidth
MaxPulseWidth and MaxMotorSpeed can be set in software in general.h file (see next part).
In the general.f file, you can change some parameters :
- line 5 : You can adjust motor PWM frequency (min: 10kHz, max: 30kHz, default: 20Hz)
#define FPWM 20000 // Hz- line 8 : Set the maximum motor speed in RPM
#define MAX_MOTOR_SPEED 8000.0 // rpm- line 11 : Set the speed at which the motor starts to spin (min: 2200, max: MAX_MOTOR_SPEED, default: 2200)
#define START_MOTOR_VALUE 2200 // rpm- line 14 : Set the command pulse width which will correpond to the maximum motor speed (1)
#define MAX_PULSE_WIDTH 0.015 // sec (1) This controller can not perform clockwise or anticlockwise direction in the same application, under the start motor speed value (START_MOTOR_VALUE), the motor is stopped. To make the motor turns in an other direction, switch 2 phases between motor and controller.
In the file tuning.c, you can change different parameter to enhance motor startup.
...
- Top layer :

- Bottom layer :

- Dimensions :
