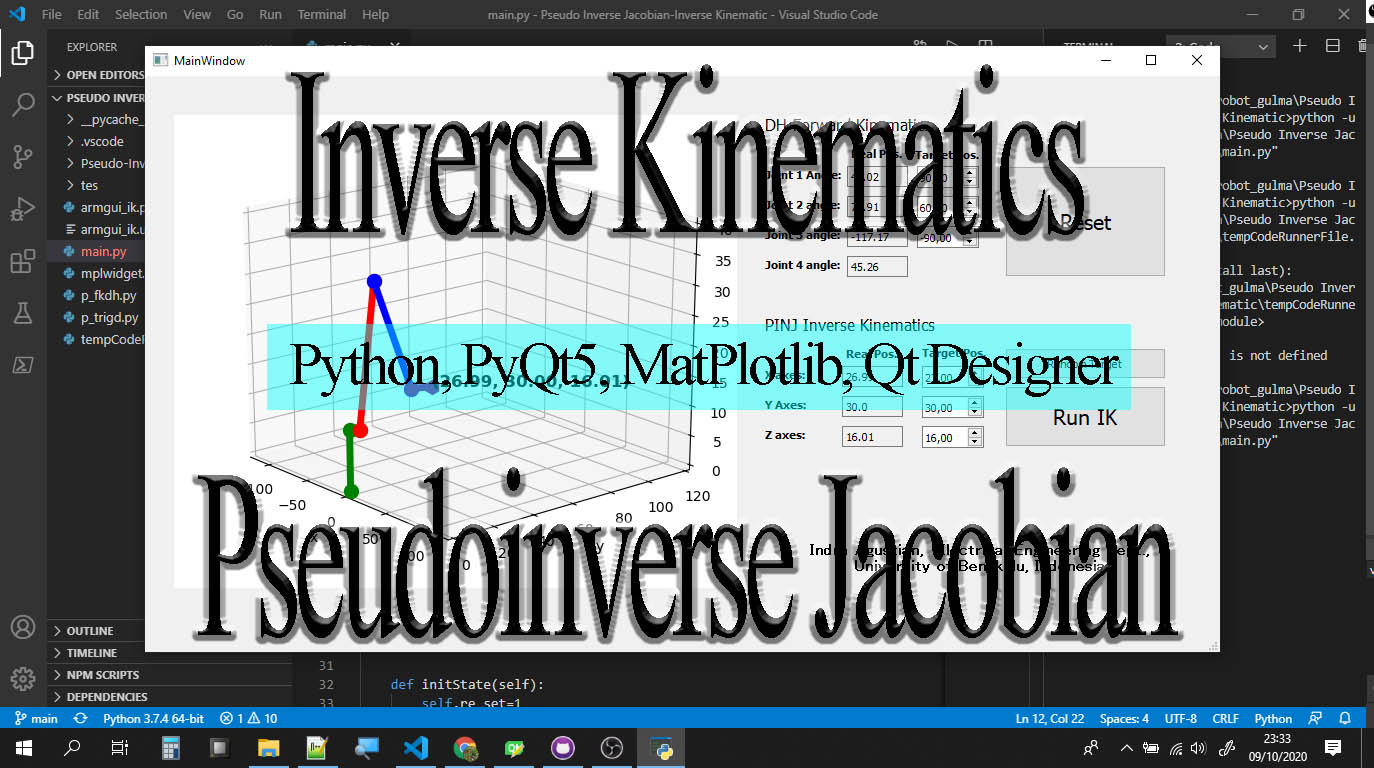
Run main.py
kinematics function: p_fkdh.py
running MatPlotlib on GUI PyQt5: mplwidget.py
Paperwork: Robot Manipulator Control with Inverse Kinematics PD-Pseudoinverse Jacobian and Forward Kinematics Denavit Hartenberg
-
Notifications
You must be signed in to change notification settings - Fork 5
License
myindrata/Pseudo-Inverse-Jacobian-Inverse-Kinematics
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation
{kind=link}
About
No description, website, or topics provided.
Resources
License
Stars
Watchers
Forks
Releases
No releases published