Based on the awesome openrct2-cli container from the OpenRCT2 team.
This container will automatically load your headless OpenRCT2 dockerized server's latest autosaved map. If one isn't available, it can load your base park file. Currently defaults to release v0.2.3, but that can be configured by setting the OPENRCT2_REF container variable.
- Clone/Pull into
openrct2-cli-docker-autosave/ docker build -t openrct2-cli-docker-autosave openrct2-cli-docker-autosave/docker run --rm -p 11753:11753 -v <Local path to OpenRCT2 config folder>:/home/openrct2/.config/OpenRCT2 -it openrct2-cli-docker-autosave. Make sure you change the local path to your OpenRCT2 config folder.
Also, you no longer need to specify host <Path to park file>, as that's taken care of in the Dockerfile's ENTRYPOINT.
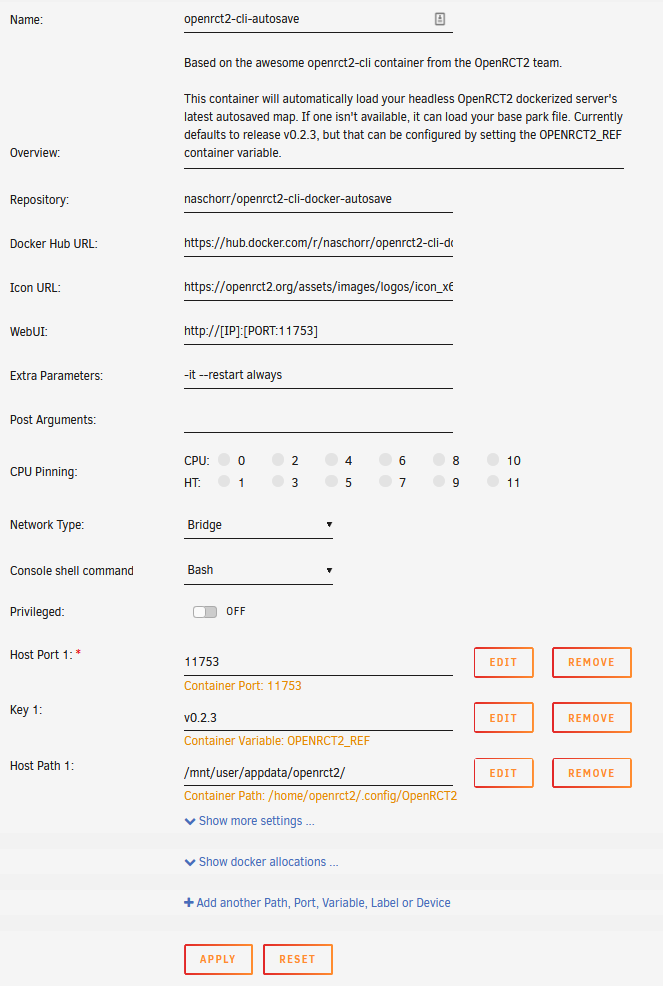
Here's an example configuration within Unraid:
This assumes that your container's folder structure is the same as the default that openrct2-cli expects, and it can't be changed without modifying the Dockerfile. Your default park save needs to be called park.sv6, otherwise the script won't detect it.