{kind=link}
Code for the CVPR 2019 paper Few-Shot Learning with Localization in Realistic Settings. Due to the sheer number of independent moving parts and user-defined parameters, we are providing our code as a series of interactive Jupyter notebooks rather than automated Python scripts.
This code requires Pytorch and torchvision 1.0.0 or higher with cuda support, and Jupyter.
It has been tested on Ubuntu 16.04.
You must download the iNat2017 dataset in order to construct meta-iNat. Before running this code, please download and unpack the iNat2017 training/validation images, and the training bounding box annotations, to a directory of your choice. The images and bounding box annotations can be found here.
Begin by running the Setup notebook, which constructs the meta-iNat dataset or a variant according to user-defined parameters. The default parameters reproduce the meta-iNat dataset used in the paper.
The Train notebook trains an ensemble of learners in parallel, according to user-defined parameters. The default parameters reproduce the best-performing model in the paper (batch folding, covariance pooling, and few-shot localization).
The Evaluate notebook tests your trained models on the reference/query images, according to user-defined parameters. It is highly recommended that your parameters for evaluating a given model match the ones used to train it. The default parameters for the evaluation code match those for the training code.
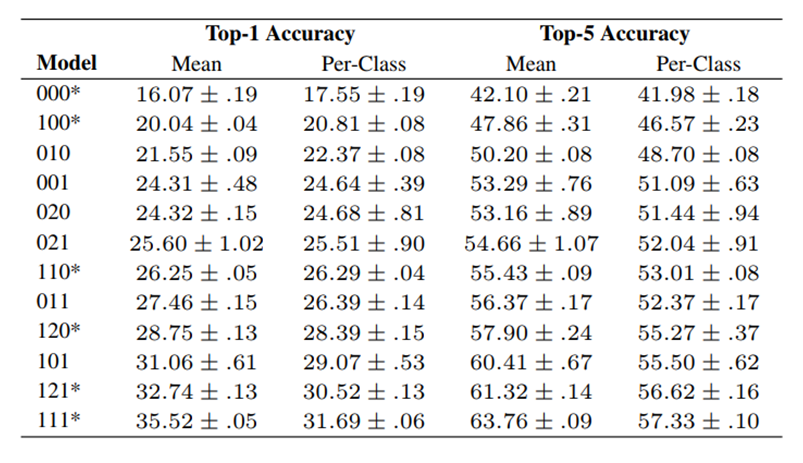
Three-digit model names indicate the presence or absence of batch folding, localization, and covariance pooling, in that order. For example, ‘101’ indicates a model with batch folding and covariance pooling, but no localization. '000' is a standard prototypical network. Because two versions of localization exist, we use ‘0’ to indicate no localization, ‘1’ for few-shot localization, and ‘2’ for unsupervised localization. A ‘*’ indicates a model presented in the main paper.