Fake GPS using ESP-IDF.

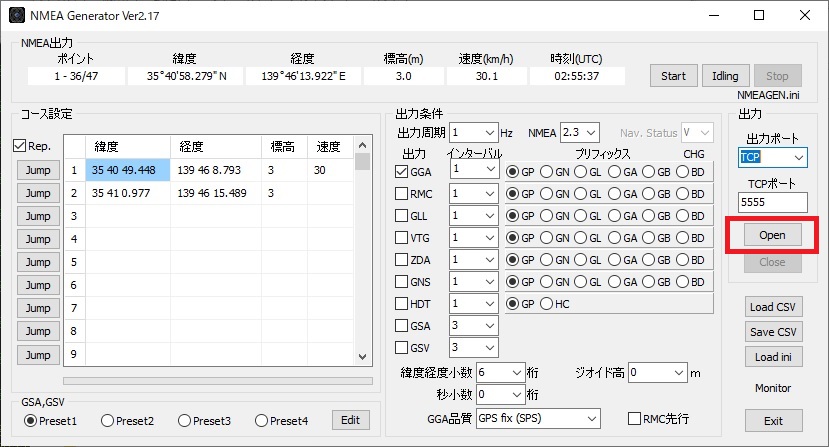
Windows application for NMEA Generator Utility is published here.
This tool generates NMEA sentences for GPS receivers and outputs them to serial or TCP ports.
This works great.
When using TCP, this app acts as a TCP server.
With this tool, you can go wherever you want in no time.
Use ESP32S2/S3 to transfer NMEA sentence received by TCP to USB.
+----------------+ +------------+ +---------------+
| REAL GPS | | UART-USB | | Windows/Linux |
| |UART | Converter |USB | |
| |---->|RX |----------------------->| |
| | | | | |
+----------------+ +------------+ +---------------+
+----------------+ +------------+ +---------------+
| NMEA Generator | | ESP32S2/S3 | | Windows/Linux |
| as FAKE GPS |TCP | |USB | |
| |====>| |----------------------->| |
| | | | | |
+----------------+ +------------+ +---------------+
In addition, it can provide NMEA sentences to two PCs.
+----------------+ +------------+ +---------------+
| NMEA Generator | | ESP32S2/S3 | | Windows/Linux |
| as FAKE GPS |TCP | |USB | |
| |====>| |----------------------->| |
| | | | | |
+----------------+ | | +---------------+
| |
| | +------------+ +---------------+
| | | UART-USB | | Windows/Linux |
| |UART | Converter |USB | |
| TX|---->|RX |---->| |
| | | | | |
+------------+ +------------+ +---------------+
ESPs that don't support USB use UART.
+----------------+ +------------+ +---------------+
| REAL GPS | | UART-USB | | Windows/Linux |
| |UART | Converter |USB | |
| |---->|RX |----------------------->| |
| | | | | |
+----------------+ +------------+ +---------------+
+----------------+ +------------+ +------------+ +---------------+
| NMEA Generator | | ESP32 | | UART-USB | | Windows/Linux |
| as FAKE GPS |TCP | |UART | Converter |USB | |
| |====>| TX|---->|RX |---->| |
| | | | | | | |
+----------------+ +------------+ +------------+ +---------------+
ESP-IDF V4.4/V5.0.
ESP-IDF V5.0 is required when using ESP32-C2.
1.Windows PC
Windows applications can be downloaded from here.
Just extract the ZIP file and run it.
This applications was made by Japan, but NMEAGEN217.zip contains English documents, so there is no problem.
Any questions about the NMEA Generator Utility should be directed to the author, not me.
2.USB Connector is required when using USB.
I used this:

ESP32-S2/S3 BOARD USB CONNECTOR
+--+
| || VCC
[GPIO 19] --------> | || D-
[GPIO 20] --------> | || D+
[ GND ] --------> | || GND
+--+
git clone https://github.com/nopnop2002/esp-idf-fake-gps
cd esp-idf-fake-gps
idf.py set-target {esp32/esp32s2/esp32s3/esp32c2/esp32c3}
idf.py menuconfig
idf.py flashYou need to know the IP address of your Windows machine beforehand.
Windows 10 is set not to respond to ping by default.
You cannot use the ping command to find out.
Use the ipconfig command from the command prompt.



-
Open NMEA Generator Utility.
-
Select TCP for the output port.

-
Check Rep.
This will repeat the NMEA transmission forever.

-
Open port.
This app acts as a TCP server.
-
Connect ESP32 to WindowsPC using USB or UART.
-
Build this firmware and start.
-
NMEA transmission start.

-
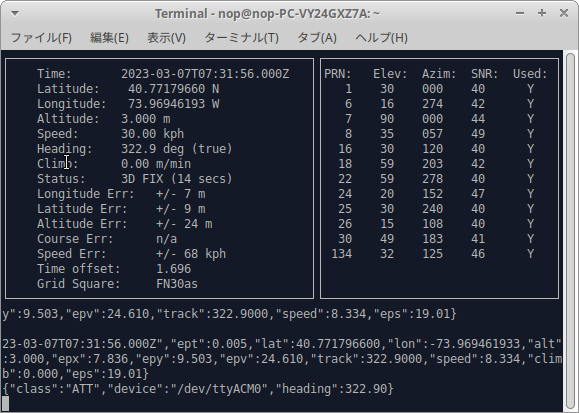
Open serial terminal on your host.
This will add GPS to your host.


$ sudo adduser $USER dialout
$ sudo apt-get install gpsd gpsd-clients
$ sudo vi /etc/default/gpsd
START_DAEMON="true"
USBAUTO="true"
DEVICES="/dev/ttyUSB0"
GPSD_OPTIONS="-n"
$ sudo service gpsd stop
$ sudo service gpsd start
$ sudo systemctl -l --no-pager status gpsd
�œ gpsd.service - GPS (Global Positioning System) Daemon
Loaded: loaded (/lib/systemd/system/gpsd.service; indirect; vendor preset: enabled)
Active: active (running) since Tue 2023-03-07 16:18:40 JST; 2s ago
Process: 5234 ExecStart=/usr/sbin/gpsd $GPSD_OPTIONS $DEVICES (code=exited, status=0/SUCCESS)
Main PID: 5235 (gpsd)
Tasks: 1 (limit: 4411)
CGroup: /system.slice/gpsd.service
mq5235 /usr/sbin/gpsd -n /dev/ttyACM0
$ gpsmon
Enter q to quit.

$ cgps
Enter q to quit.
$ sudo apt install foxtrotgps
$ sudo vi /etc/default/gpsd
#GPSD_OPTIONS="-n"
GPSD_OPTIONS="-n -G"
$ sudo service gpsd stop
$ sudo service gpsd start
$ sudo systemctl -l --no-pager status gpsd
�œ gpsd.service - GPS (Global Positioning System) Daemon
Loaded: loaded (/lib/systemd/system/gpsd.service; indirect; vendor preset: enabled)
Active: active (running) since Tue 2023-03-07 16:18:40 JST; 2s ago
Process: 5234 ExecStart=/usr/sbin/gpsd $GPSD_OPTIONS $DEVICES (code=exited, status=0/SUCCESS)
Main PID: 5235 (gpsd)
Tasks: 1 (limit: 4411)
CGroup: /system.slice/gpsd.service
mq5235 /usr/sbin/gpsd -n /dev/ttyACM0
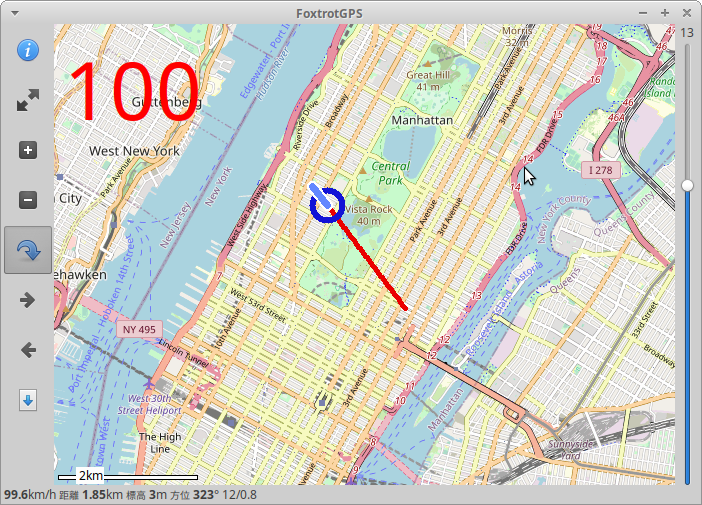
$ foxtrotgps
It flew over Manhattan's Central Park at 100km/h.

$ sudo vi /lib/systemd/system/gpsd.socket
#ListenStream=127.0.0.1:2947
ListenStream=0.0.0.0:2947
$ sudo service gpsd stop
$ sudo service gpsd start
$ sudo systemctl -l --no-pager status gpsd
�œ gpsd.service - GPS (Global Positioning System) Daemon
Loaded: loaded (/lib/systemd/system/gpsd.service; indirect; vendor preset: enabled)
Active: active (running) since Tue 2023-03-07 16:18:40 JST; 2s ago
Process: 5234 ExecStart=/usr/sbin/gpsd $GPSD_OPTIONS $DEVICES (code=exited, status=0/SUCCESS)
Main PID: 5235 (gpsd)
Tasks: 1 (limit: 4411)
CGroup: /system.slice/gpsd.service
mq5235 /usr/sbin/gpsd -n /dev/ttyACM0
# From remote
$ foxtrotgps <IP address of the server where gpsd is running>:2947
You can use nmea_serial_driver and rviz_satellite.
The nmea serial driver APT package has a bug and does not work properly.
Must be installed from source.
I live in Nagoya, Japan, but my ROS robot is currently moving through Manhattan's Central Park.
