Documentation: Question about expected return #376
Comments
|
Hi, @aflgit. I'll try to explain how I understand this:
Hope it helps. Alberto |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Hi,
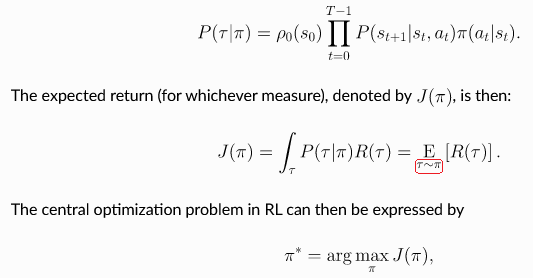
going through the RL Intro I stumbled something that is not yet clear to me. On https://spinningup.openai.com/en/latest/spinningup/rl_intro.html#the-rl-problem
for the expected return it says
.. math:: J(\pi) = \int_{\tau} P(\tau|\pi) R(\tau) = \underE{\tau\sim \pi}{R(\tau)}
where I would have expected
.. math:: J(\pi) = \int_{\tau} P(\tau|\pi) R(\tau) = \underE{\tau\sim P}{R(\tau)}
My understanding is that \tau is a RV distributed with respect to P, and only the actions are taken from \pi, as later clearly differentiated on https://spinningup.openai.com/en/latest/spinningup/rl_intro.html#bellman-equations
Please, can someone explain me why it says \tau\sim \pi?
Thank you very much in advance!
The text was updated successfully, but these errors were encountered: