-
-
Notifications
You must be signed in to change notification settings - Fork 55.6k
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #23264 from AleksandrPanov:add_detect_qr_with_aruco
Add detect qr with aruco #23264 Using Aruco to detect finder patterns to search QR codes. TODO (in next PR): - add single QR detect (update `detect()` and `detectAndDecode()`) - need reduce full enumeration of finder patterns - need add finder pattern info to `decode` step - need to merge the pipeline of the old and new algorithm [Current results:](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit#gid=1192415584) +20% total detect, +8% total decode in OpenCV [QR benchmark](https://github.com/opencv/opencv_benchmarks/tree/develop/python_benchmarks/qr_codes) 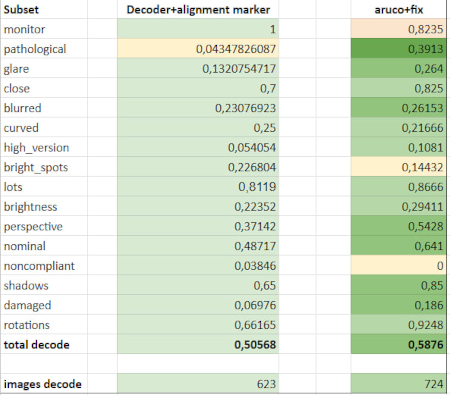 78.4% detect, 58.7% decode vs 58.5 detect, 50.5% decode in default [main.py.txt](https://github.com/opencv/opencv/files/10762369/main.py.txt) 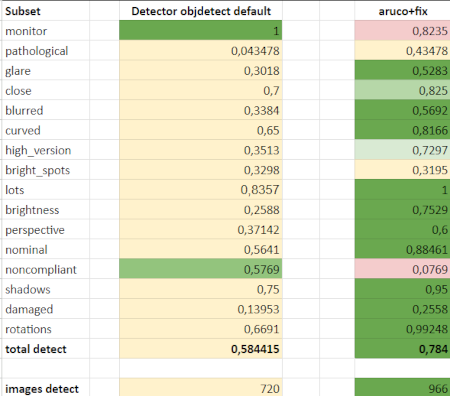 add new info to [google docs](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit?usp=sharing) ### Pull Request Readiness Checklist See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request - [x] I agree to contribute to the project under Apache 2 License. - [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV - [x] The PR is proposed to the proper branch - [x] There is a reference to the original bug report and related work - [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable Patch to opencv_extra has the same branch name. - [ ] The feature is well documented and sample code can be built with the project CMake
{kind=link}
{kind=link}
- Loading branch information
1 parent
5330112
commit 9fa014e
Showing
7 changed files
with
929 additions
and
362 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,7 @@ | ||
| { | ||
| "ManualFuncs" : { | ||
| "QRCodeDetectorAruco": { | ||
| "getDetectorParameters": { "declaration" : [""], "implementation" : [""] } | ||
| } | ||
| } | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.