Feature/Advanced Motion Control #1061
Merged
Conversation
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
* Fixed some Backlash Compensation bugs for the new Directional method. * Hide deprecated Gcode commands in the Combobox, if they are not set to a value already.
…ntiated. * Some bug-fixes.
* Interpolation settings moved to the GcodeAsyncDriver where they belong, getters return defaults in GcodeDriver. * timeoutMilliseconds is stretched to the inverse of the Machine Speed where it matters. So tests with very small speed factors won't timeout. * Added ModeratedConstantAcceleration motion control type. * Bug-fixes from testing with controller/stepper attached.
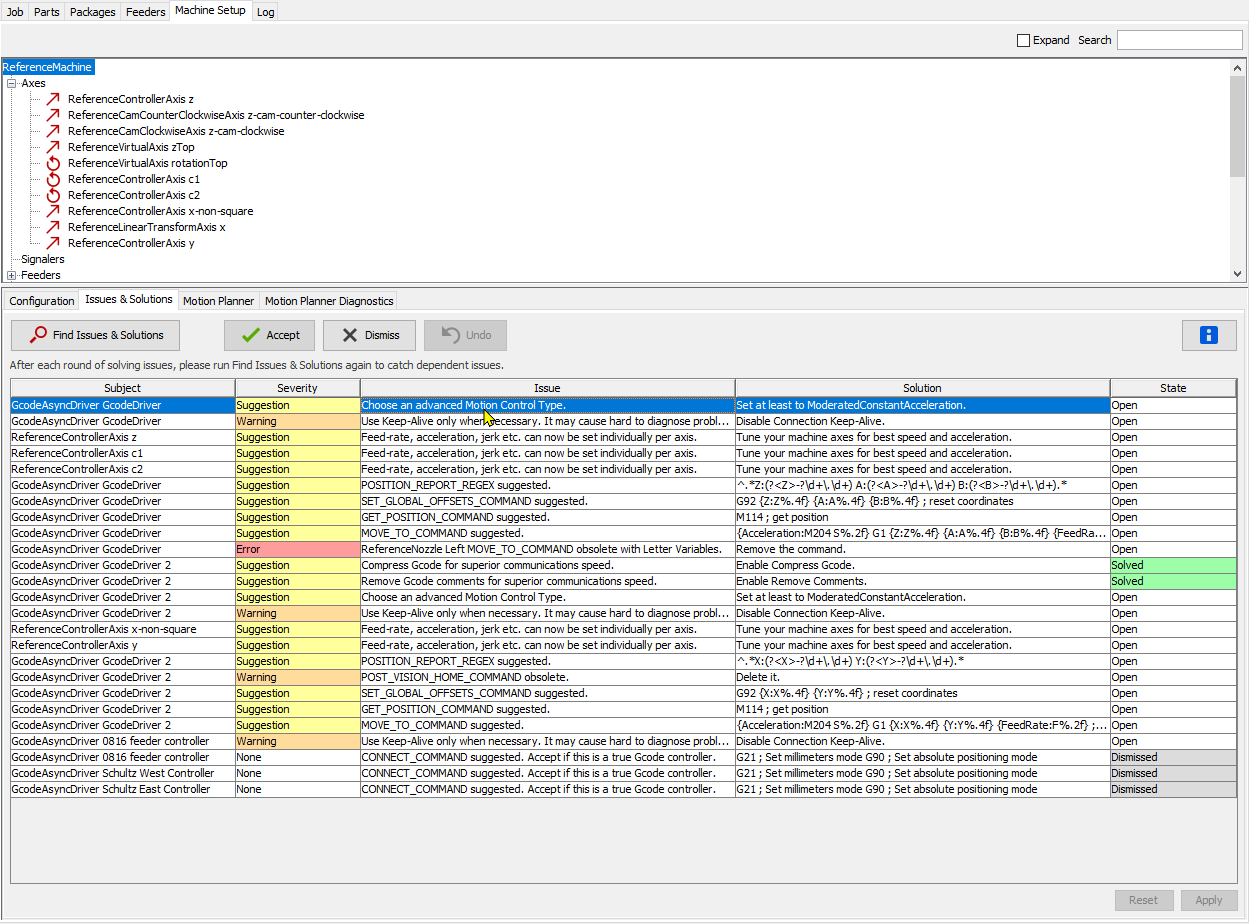
* ReferenceAdvancedMotionPlannerConfigurationWizard added, exposing the MotionPlanner as a Wizard page of the machine. * Refactored actuator sub-class Wizards to use base class AbstractActuatorConfigurationWizard for common stuff (in preparation to add more common stuff). * extracted public method to allow (re-) selection of current object in the Machine Setup Tree, therefore allow loading Wizards with changing set of tabs. * moved getMotionPlanner() to Machine interface.
…lass hierarchy similar to other machine objects. * Made interpolation a task of the MotionPlanner, drivers now only execute single moveTo commands.
* First steps towards advanced motion planner * Support profiles with fused reversing ramps i.e. acceleration != 0 in mid segment * Test case reworked
… solving from profile solving. * Simplified "PnP class" path solver heuristics completed.
* Migrate Safe Z. * BasicJobTest with proper working Z below Safe Z * ReferenceAdvancedMotionPlanner performs uncoordinated moves in Safe Zone
* New interpolation method.
* Bugfixing
* Better uncoordinated motion synchronization, tries to approximate coordinated. * Bugfixing.
…s in the profile). * Testing on machine.
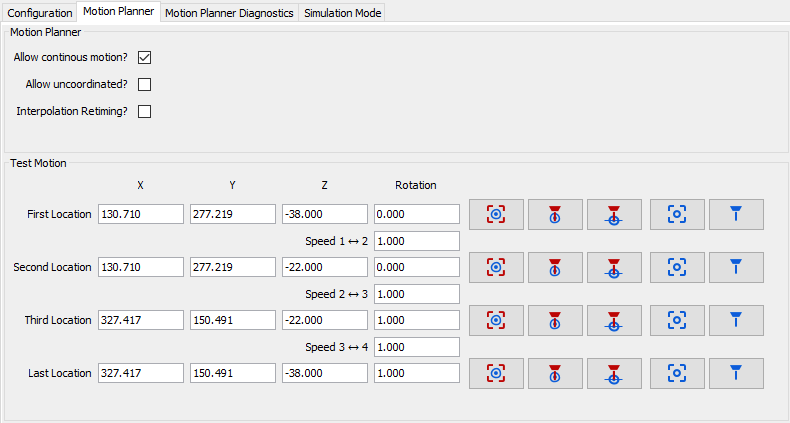
* Added Test Motion. * Time measurements in diagnostics. * Interpolation failure status.
* Retiming optionFlags * Fine tuning. * More tests on Smoothie.
* Redesigned ugly axis limit icons.
|
This comment is used as a repository for images used in the upcoming Wiki page. Do not delete.
|










































* Made "infinite" timeouts into 5 minutes to (eventually) resolve hard-to-diagnose hangs. * Added after actuate machine coordination back, needed for contact probing. * Added Safe Z handling for virtual axes (takes home coordinate).
|
Amazing work @markmaker !! |
|
Absolutely incredible work @markmaker. It's very exciting to see this go from concept to prototype to working code with all the bells and whistles. Great work on this, and thank you for your continued dedication to outstanding code quality and documentation! |
|
Thanks ¦-) |
|
This comment is used as a repository for images used in the second round of editing the Wiki pages. Do not delete.
|






























This was referenced Oct 16, 2020
This was referenced Oct 25, 2020
markmaker
added a commit
to markmaker/openpnp
that referenced
this pull request
Dec 12, 2020
…pnp#1035) * First implementation round. GCodeDriver Axis management is still redundantly in there. * Reworked Drivers to flat list. * Machine Setup Panel Tabs per class restoring and out of bounds bugfix. * Work in progress, backup commit. * Add * Axes and Transformations' Wizards implemented. Reorganized into own axis package. Wrestle with WindowBuilder. * First time tests run successful. GcodeDriver still partially running on its own (redundant) Axis mapping. * Testing and refining migration with examples. * Resolved openpnp#998 merging issues. * Cosmetics. * Created new AxesLocation for Controller side. Reworked all Transformations. * Made tests run with AxesLocation. * Testing: First steps towards "simulated imperfection". * Tested using NullDriver. * Added simulated Homing Error corrected by Visual Homing * Added simulated non-squareness corrected by Linear Axis Non-Squareness Transformation * Added simulated vibration to test Camera Settle * Added simulated camera noise to test Camera Settle * Added simulated nozzle runout to test Runout Compensation No Unit yet. * Restrict image transfer to the area of the source image, to fix some wrapping-around when going beyond the image margin. * Backup commit. * Factored OpenCvUtils.createFootprintTemplate() out for use outside of stages. * SimulationModeMachine can now check pick and place Locations by inspecting the ImageCamera view at the location. * Sub-pixel rendering etc. * Refined the NullMotionPlanner and various stuff. * Fix the camera view rotation jog to work with and respect mapped axes. * MotionPlanner first implementation. Before MappedAxes refactoring. * Reworked: no MappedAxes. Axis limits. Rotation wrap-around. * Added solver. * Better description and simpler formula. Getting the hang of this. * More cosmetics * Backup commit. * Backup commit. * Added motion solver test. Does not work (yet). * Backup commit * Backup commit before solver remove. * Removed tnc solver. Almost completed profile solver cases. * Backup commit * Changed profile solver to rudimentary secant method. * Solver seems to work now. * Backup commit * New region solver. * Tests augmented. * Before reworking path solver. * Backup before reworking path solving/half sided profiles. * Finish without trying to implement advanced motion planning. Cleanup and better comments. * Better comments. * Removed unnecessary (whitespace) changes etc. Better comments. * Self code review bugfixes. * Constant acceleration profiles. Optionally test an imperfect machine in the SampleJobTest. * Simplify Motion and MotionOption. Implement analytical constant acceleration profile solving for symmetric cases. Lots of cosmetics. * Testing on the machine with GcodeDriver: refinements and bugfixes. * Test bugfix. (cherry picked from commit f6713b6) Fix/global axes bugfixes 1 (openpnp#1038) * Squashed commit of the following: commit a252f08 Author: markmaker <mark@makr.zone> Own Machine testing bug-fixes. Proper X, Y filtering of Visual Homing axes by the Camera that is used (mapped axes only). Also found logic inversion error in ReferenceHead.isInsideSoftLimits(HeadMountable, Location). Testing this with multiple Heads and no camera on second head required changing Park Location interpretation to any HeadMountable. commit c765eaf Author: markmaker <mark@makr.zone> Initial user group machine testing bugfixes. Thank you Duncan, Bill, Marmalade, Mike! Removed obsolete openpnp\src\main\java\org\openpnp\machine\reference\driver\wizards\AbstractTcpDriverConfigurationWizard.java commit 190b34b Author: markmaker <mark@makr.zone> Test bugfix. commit 3a94e82 Author: markmaker <mark@makr.zone> Testing on the machine with GcodeDriver: refinements and bugfixes. commit 1f52b1c Author: markmaker <mark@makr.zone> Simplify Motion and MotionOption. Implement analytical constant acceleration profile solving for symmetric cases. Lots of cosmetics. commit 38aae5d Author: markmaker <mark@makr.zone> Constant acceleration profiles. Optionally test an imperfect machine in the SampleJobTest. commit e38384a Author: markmaker <mark@makr.zone> Self code review bugfixes. commit c4f87b7 Merge: cd6b55f edbca39 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes Conflicts resolved: * src/test/java/VisionUtilsTest.java commit cd6b55f Author: markmaker <mark@makr.zone> Removed unnecessary (whitespace) changes etc. Better comments. commit ee29ca7 Author: markmaker <mark@makr.zone> Better comments. commit c8c0e7e Merge: ef152b6 10b0095 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes Resolved Conflicts: * src/main/java/org/openpnp/machine/reference/ReferenceMachine.java commit ef152b6 Author: markmaker <mark@makr.zone> Finish without trying to implement advanced motion planning. Cleanup and better comments. commit 2e1a0ee Author: markmaker <mark@makr.zone> Backup before reworking path solving/half sided profiles. commit fb92b4d Author: markmaker <mark@makr.zone> Before reworking path solver. commit 9443afb Merge: 9aed71f 5280aa8 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes Conflicts resolved: * src/main/java/org/openpnp/machine/reference/ReferenceMachine.java * src/main/java/org/openpnp/machine/reference/ReferenceNozzleTipCalibration.java * src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java commit 9aed71f Author: markmaker <mark@makr.zone> Tests augmented. commit 777ed4a Author: markmaker <mark@makr.zone> New region solver. commit 2511dcf Author: markmaker <mark@makr.zone> Backup commit commit 273474c Author: markmaker <mark@makr.zone> Solver seems to work now. commit 4cd7f6d Author: markmaker <mark@makr.zone> Changed profile solver to rudimentary secant method. commit aaa832f Author: markmaker <mark@makr.zone> Backup commit commit 512ce63 Author: markmaker <mark@makr.zone> Removed tnc solver. Almost completed profile solver cases. commit 15996c6 Author: markmaker <mark@makr.zone> Backup commit before solver remove. commit 019436b Author: markmaker <mark@makr.zone> Backup commit commit 46a3be1 Author: markmaker <mark@makr.zone> Added motion solver test. Does not work (yet). commit b8a5780 Author: markmaker <mark@makr.zone> Backup commit. commit 4a5f01f Author: markmaker <mark@makr.zone> Backup commit. commit 5de4b1c Author: markmaker <mark@makr.zone> More cosmetics commit 557c005 Author: markmaker <mark@makr.zone> Better description and simpler formula. Getting the hang of this. commit 4b8f935 Author: markmaker <mark@makr.zone> Added solver. commit e3a14a2 Author: markmaker <mark@makr.zone> Reworked: no MappedAxes. Axis limits. Rotation wrap-around. commit f8301ba Author: markmaker <mark@makr.zone> MotionPlanner first implementation. Before MappedAxes refactoring. commit 71c672d Author: markmaker <mark@makr.zone> Fix the camera view rotation jog to work with and respect mapped axes. commit 0dbdf0b Author: markmaker <mark@makr.zone> Refined the NullMotionPlanner and various stuff. commit 2234e45 Author: markmaker <mark@makr.zone> Sub-pixel rendering etc. commit 7e98c23 Author: markmaker <mark@makr.zone> SimulationModeMachine can now check pick and place Locations by inspecting the ImageCamera view at the location. commit ba10f8c Author: markmaker <mark@makr.zone> Factored OpenCvUtils.createFootprintTemplate() out for use outside of stages. commit 02bcfa5 Author: markmaker <mark@makr.zone> Backup commit. commit 3d2409a Author: markmaker <mark@makr.zone> Restrict image transfer to the area of the source image, to fix some wrapping-around when going beyond the image margin. commit 0be6a0e Merge: 4b389c7 b4310b6 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes commit 4b389c7 Author: markmaker <mark@makr.zone> Tested using NullDriver. * Added simulated Homing Error corrected by Visual Homing * Added simulated non-squareness corrected by Linear Axis Non-Squareness Transformation * Added simulated vibration to test Camera Settle * Added simulated camera noise to test Camera Settle * Added simulated nozzle runout to test Runout Compensation No Unit yet. commit c08725c Author: markmaker <mark@makr.zone> Testing: First steps towards "simulated imperfection". commit 3e72d57 Author: markmaker <mark@makr.zone> Made tests run with AxesLocation. commit 4dd295d Merge: 19f2505 b8548f9 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes commit 19f2505 Author: markmaker <mark@makr.zone> Created new AxesLocation for Controller side. Reworked all Transformations. commit 80117eb Author: markmaker <mark@makr.zone> Cosmetics. commit b36f6e9 Author: markmaker <mark@makr.zone> Resolved openpnp#998 merging issues. commit 0139331 Merge: 8b266b2 19e2925 Author: markmaker <mark@makr.zone> Merge branch 'develop' into feature/global-axes # Conflicts resolved: * src/main/java/org/openpnp/machine/marek/MarekNozzle.java * src/main/java/org/openpnp/machine/neoden4/NeoDen4Driver.java * src/main/java/org/openpnp/machine/reference/ReferenceActuator.java * src/main/java/org/openpnp/machine/reference/ReferenceCamera.java * src/main/java/org/openpnp/machine/reference/ReferenceDriver.java * src/main/java/org/openpnp/machine/reference/ReferenceHead.java * src/main/java/org/openpnp/machine/reference/ReferenceNozzle.java * src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java * src/main/java/org/openpnp/machine/reference/driver/NullDriver.java * src/main/java/org/openpnp/spi/Movable.java * src/main/java/org/openpnp/spi/base/AbstractActuator.java * src/main/java/org/openpnp/spi/base/AbstractCamera.java * src/test/java/BasicJobTest.java * src/test/java/VisionUtilsTest.java * src/test/java/org/openpnp/machine/reference/driver/test/TestDriver.java commit 8b266b2 Author: markmaker <mark@makr.zone> Testing and refining migration with examples. commit 1dc16ec Author: markmaker <mark@makr.zone> First time tests run successful. GcodeDriver still partially running on its own (redundant) Axis mapping. commit b12c661 Author: markmaker <mark@makr.zone> Axes and Transformations' Wizards implemented. Reorganized into own axis package. Wrestle with WindowBuilder. commit daa9eee Author: markmaker <mark@makr.zone> Add commit ce3f543 Author: markmaker <mark@makr.zone> Work in progress, backup commit. commit 53e7875 Author: markmaker <mark@makr.zone> Machine Setup Panel Tabs per class restoring and out of bounds bugfix. commit e61af78 Author: markmaker <mark@makr.zone> Reworked Drivers to flat list. commit 51ea613 Author: markmaker <mark@makr.zone> First implementation round. GCodeDriver Axis management is still redundantly in there. Conflicts resolved: * src/main/java/org/openpnp/machine/reference/ReferenceHead.java * src/main/java/org/openpnp/machine/reference/axis/ReferenceControllerAxis.java * src/main/java/org/openpnp/machine/reference/axis/ReferenceMappedAxis.java * src/main/java/org/openpnp/machine/reference/axis/wizards/ReferenceControllerAxisConfigurationWizard.java * src/main/java/org/openpnp/machine/reference/driver/AbstractMotionPlanner.java * src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java * src/main/java/org/openpnp/model/AxesLocation.java * src/main/java/org/openpnp/model/Motion.java * src/main/java/org/openpnp/spi/ControllerAxis.java * src/main/java/org/openpnp/spi/base/AbstractControllerAxis.java * Initial user group machine testing bugfixes. Thank you Duncan, Bill, Marmalade, Mike! Removed obsolete openpnp\src\main\java\org\openpnp\machine\reference\driver\wizards\AbstractTcpDriverConfigurationWizard.java * Cosmetics. (cherry picked from commit d46cfb3) Fix/Global Axes Enhancements and Bug-Fixes 2 (openpnp#1042) * Integrated GcodeServer into SimulationMode. * Added MotionControlType to Driver. Implemented simplified S-Curves as in TinyG and Marlin. Bugfixes. * Tests with Null Machine. New reset button for default GcodeDriver commands. Bug-fixes. (cherry picked from commit c144c75) Feature/Better Backlash Compensation (openpnp#1047) * Removed backlash compensation from GcodeDriver and added it to the Motion Planner. * A new BacklashCompensationMethod can now be selected on the axis. * Added optimized one-sided backlash compensation that only adds an extra move, if on the wrong side. * Added directional backlash compensation that works without extra moves. (cherry picked from commit 58a54a7) Feature/Advanced Motion Control (openpnp#1061) * Make Directional Backlash Compensation one sided too for better compatibility. * Asynchronous GcodeDriver first steps. * * Implemented GcodeAsyncDriver. * Fixed some Backlash Compensation bugs for the new Directional method. * Hide deprecated Gcode commands in the Combobox, if they are not set to a value already. * * Adding the GcodeAsyncDriver class to the Machine so it can be instantiated. * Some bug-fixes. * Bugfixes, testing with controller. * First trials with interpolation. * Fixed Logger thread safety. * * New GcodeAsyncDriverSettings Wizard. * Interpolation settings moved to the GcodeAsyncDriver where they belong, getters return defaults in GcodeDriver. * timeoutMilliseconds is stretched to the inverse of the Machine Speed where it matters. So tests with very small speed factors won't timeout. * Added ModeratedConstantAcceleration motion control type. * Bug-fixes from testing with controller/stepper attached. * * MotionPlanner class can now be selected in the Machine Wizard. * ReferenceAdvancedMotionPlannerConfigurationWizard added, exposing the MotionPlanner as a Wizard page of the machine. * Refactored actuator sub-class Wizards to use base class AbstractActuatorConfigurationWizard for common stuff (in preparation to add more common stuff). * extracted public method to allow (re-) selection of current object in the Machine Setup Tree, therefore allow loading Wizards with changing set of tabs. * moved getMotionPlanner() to Machine interface. * * Actuator, machine & motion coordination * * CameraView Zoom increment clipped to >= 1.0 if best scale quality is selected * * Remodeled ReferenceDriver interface into spi Driver interface and class hierarchy similar to other machine objects. * Made interpolation a task of the MotionPlanner, drivers now only execute single moveTo commands. * * Backlash compensation more robust when settings change during session * First steps towards advanced motion planner * Support profiles with fused reversing ramps i.e. acceleration != 0 in mid segment * Test case reworked * * Path solver progress. * * Refactored overshoot control * * Good working order. * * Refactored AbstractMotionPath out of MotionProfile to separate path solving from profile solving. * Simplified "PnP class" path solver heuristics completed. * * Controller axes get Safe Zone * * Implemented Axis centric Safe (Z) Zone * Migrate Safe Z. * BasicJobTest with proper working Z below Safe Z * ReferenceAdvancedMotionPlanner performs uncoordinated moves in Safe Zone * * Machine testing. * * First steps towards better interpolation. * * Reverted Momentaries. * New interpolation method. * * More testing. * * Diagnostic Graphics * Bugfixing * * Finished graphical diagnostics. * Better uncoordinated motion synchronization, tries to approximate coordinated. * Bugfixing. * * Interpolation intervals snap to the special points in time (extremes in the profile). * Testing on machine. * * Proper diagnostics for all MotionControlType variants. * Added Test Motion. * Time measurements in diagnostics. * Interpolation failure status. * * C axis in Test motionGraph * Retiming optionFlags * Fine tuning. * More tests on Smoothie. * * extensive testing on machine * * Extensive code review, last fixes and final touches. * Redesigned ugly axis limit icons. * * Solved position reporting dilemma. * Made "infinite" timeouts into 5 minutes to (eventually) resolve hard-to-diagnose hangs. * Added after actuate machine coordination back, needed for contact probing. * Added Safe Z handling for virtual axes (takes home coordinate). (cherry picked from commit 52f2756) * Conflicts resolved: * src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java Merge pull request openpnp#1065 from markmaker/feature/advanced-motion-control--update Feature/Advanced Motion Control - Various Improvments Merging this myself, in the testing branch regime. (cherry picked from commit b5a53eb) Merge pull request openpnp#1066 from markmaker/feature/advanced-motion-control--update-2 Feature/Advanced Motion Control - Update 2 (cherry picked from commit 75bda17) Merge pull request openpnp#1071 from markmaker/feature/advanced-motion-control--3 Feature / Advanced Motion Control - Update 3 (cherry picked from commit 4a96553) Merge pull request openpnp#1072 from markmaker/feature/advanced-motion-control--4 Feature/Advanced Motion Control - Update 4 (cherry picked from commit dfba626) Merge pull request openpnp#1073 from markmaker/feature/advanced-motion-control--5 Feature / Advanced Motion Control - Update 5 (cherry picked from commit 56eae4d) Merge pull request openpnp#1074 from markmaker/feature/advanced-motion-control--6 Feature / Advanced Motion Control - Update 6 (cherry picked from commit e5b521c) Merge pull request openpnp#1082 from markmaker/feature/advanced-motion-control--7 Feature / Advanced Motion Control - Update 7 (cherry picked from commit e12b91a) * Better TinyG SET_GLOBAL_OFFSETS_COMMAND suggestion. (cherry picked from commit 2bcaff3151ba7d8516c16551d5a74202d57c9c74) * Cherry Pick artifact?
markmaker
added a commit
to markmaker/openpnp
that referenced
this pull request
Dec 12, 2020
* Make Directional Backlash Compensation one sided too for better compatibility. * Asynchronous GcodeDriver first steps. * * Implemented GcodeAsyncDriver. * Fixed some Backlash Compensation bugs for the new Directional method. * Hide deprecated Gcode commands in the Combobox, if they are not set to a value already. * * Adding the GcodeAsyncDriver class to the Machine so it can be instantiated. * Some bug-fixes. * Bugfixes, testing with controller. * First trials with interpolation. * Fixed Logger thread safety. * * New GcodeAsyncDriverSettings Wizard. * Interpolation settings moved to the GcodeAsyncDriver where they belong, getters return defaults in GcodeDriver. * timeoutMilliseconds is stretched to the inverse of the Machine Speed where it matters. So tests with very small speed factors won't timeout. * Added ModeratedConstantAcceleration motion control type. * Bug-fixes from testing with controller/stepper attached. * * MotionPlanner class can now be selected in the Machine Wizard. * ReferenceAdvancedMotionPlannerConfigurationWizard added, exposing the MotionPlanner as a Wizard page of the machine. * Refactored actuator sub-class Wizards to use base class AbstractActuatorConfigurationWizard for common stuff (in preparation to add more common stuff). * extracted public method to allow (re-) selection of current object in the Machine Setup Tree, therefore allow loading Wizards with changing set of tabs. * moved getMotionPlanner() to Machine interface. * * Actuator, machine & motion coordination * * CameraView Zoom increment clipped to >= 1.0 if best scale quality is selected * * Remodeled ReferenceDriver interface into spi Driver interface and class hierarchy similar to other machine objects. * Made interpolation a task of the MotionPlanner, drivers now only execute single moveTo commands. * * Backlash compensation more robust when settings change during session * First steps towards advanced motion planner * Support profiles with fused reversing ramps i.e. acceleration != 0 in mid segment * Test case reworked * * Path solver progress. * * Refactored overshoot control * * Good working order. * * Refactored AbstractMotionPath out of MotionProfile to separate path solving from profile solving. * Simplified "PnP class" path solver heuristics completed. * * Controller axes get Safe Zone * * Implemented Axis centric Safe (Z) Zone * Migrate Safe Z. * BasicJobTest with proper working Z below Safe Z * ReferenceAdvancedMotionPlanner performs uncoordinated moves in Safe Zone * * Machine testing. * * First steps towards better interpolation. * * Reverted Momentaries. * New interpolation method. * * More testing. * * Diagnostic Graphics * Bugfixing * * Finished graphical diagnostics. * Better uncoordinated motion synchronization, tries to approximate coordinated. * Bugfixing. * * Interpolation intervals snap to the special points in time (extremes in the profile). * Testing on machine. * * Proper diagnostics for all MotionControlType variants. * Added Test Motion. * Time measurements in diagnostics. * Interpolation failure status. * * C axis in Test motionGraph * Retiming optionFlags * Fine tuning. * More tests on Smoothie. * * extensive testing on machine * * Extensive code review, last fixes and final touches. * Redesigned ugly axis limit icons. * * Solved position reporting dilemma. * Made "infinite" timeouts into 5 minutes to (eventually) resolve hard-to-diagnose hangs. * Added after actuate machine coordination back, needed for contact probing. * Added Safe Z handling for virtual axes (takes home coordinate). (cherry picked from commit 52f2756) * Conflicts resolved: * src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
Description
This PR adds the actual Advanced Motion Control on top of the groundwork in #1035 (plus #1038, #1042, #1047) while further refining and completing this basis.
Basic Features
Strongly committed to migrate existing machine setups practically unchanged, users can then adopt advanced Motion Control features step-by-step in a graded approach.
Uses sub-classing to add advanced (and sometime still experimental) features only if you want them. Keeps the GUI (mostly) unburdened, if you don't use the features.
Many individual features are automatically enabled/disabled and compatibility with various types of controllers provided, based on the Motion Control Type you select:
Add the Advanced Motion Planner that can optimize a whole path of moves into a jerk controlled, blended, smooth trajectory.
Add motion path interpolation, that can generate advanced motion into small segments of classic Constant Acceleration Motion understood by many controllers (but see later).
Introduces waiting for motion completion, only when needed, i.e. the controller and OpenPnP can fully work in parallel, with command queuing and elimination of some communications delays.
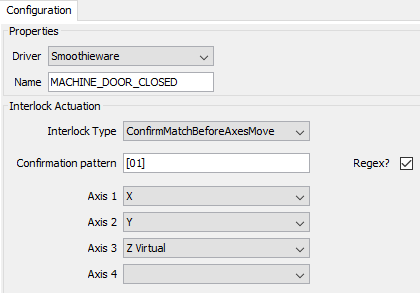
Add the GcodeAsyncDriver sub-class that can drive the controller asynchronously, with a writer thread, using asynchronous confirmation flow control (optional) and robust motion completion hand-shaking.
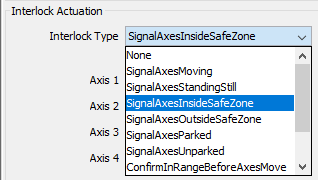
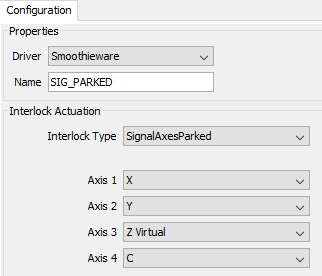
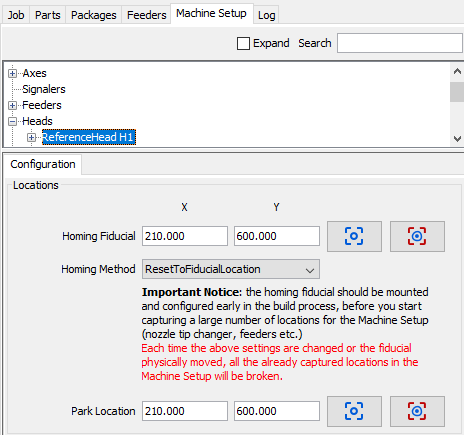
A new Axis centric Safe Zone automatically provides the Safe Z for all the HeadMountables that map the axis. No "Safe Z fighting" between shared Axes anymore.
Also available on the other linear axes (X, Y), it can (optionally) provide the Safe Zone for uncoordinated a.k.a. "overshooting" motion. But even if you don't use that feature, it allows for optimized Safe Z handling with multi-nozzle machines, i.e. axes don't need to be retracted all the way to the balance-point, saving time on machines with large Z headroom (a HeadMountable already anywhere in the Safe Zone will not be moved on
moveToSafeZ()).Adds cool graphical Motion Control Diagnostics, showing both the planned and the interpolated ("simulated") motion and the artifacts the interpolation creates:
Limitation of Scope / Experimental Features
Not all the features of this PR have been fully proven in practical application yet. The fully smoothed motion interpolation has turned out too complex for Smoothieware both in demands for RAM and for processing power (it can be demonstrated to work in principle, at reduced speed). A much more powerful Duet3D 3 controller has been kindly donated by the manufacturer to explore these advanced features. Thank you dc42!
However, many very useful features, including interpolation for jerk control alone (without the curved path smoothing), have been proven useful and feasible on Smoothieware and it is assumed to work on other similar 32bit controllers.
Therefore, it is now my desire to draw a line and get this work tested, finished and accepted into develop, separated from any ongoing work with more powerful controllers. There is considerable confidence that the framework for the advanced features is sound and won't require dramatic changes later.
By making the experimental features available in the testing version, I hope to attract some testers that have rolled their own new powerful controllers in the last months, as discussed in the group. ;-)
Justification
The justification has been discussed in-depth in the user group.
https://groups.google.com/g/openpnp/c/bEVZvYoXO98/m/hl14FcspBwAJ
Instructions for Use
I will start writing the Wiki in unlinked pages, starting with the groundwork in #1035 (plus #1038, #1042, #1047) and eventually covering this PR.
Implementation Details
org.openpnp.spiororg.openpnp.modelpackages have been done, most are refinements of the changes already done in the groundwork PRs.mvn testsuccessfully before submitting the Pull Request.