The ocean reflects the laser beams #29
Comments
|
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare). Hi Carlos, I have been looking at this and the linked issue. If you want an example of the behavior of a velodyne on the water, the lidar data in the following image was accumulated from several scans of an artificial lake. The sensor was an HDL-32 mounted on a WAM-V. The top of the image includes trees and a beach, the bottom is the water surface. Note that in this image, the velodyne produces only a very few returns from the water surface. A connected issue may be that the GPU velodyne implementation does not currently support variable reflectivity. A bug has been filed about this on the dataspeed bitbucket. If the bug is resolved, it may be possible to create the expected behaviour by setting the oceans laser_retro value to zero. Regards, |
|
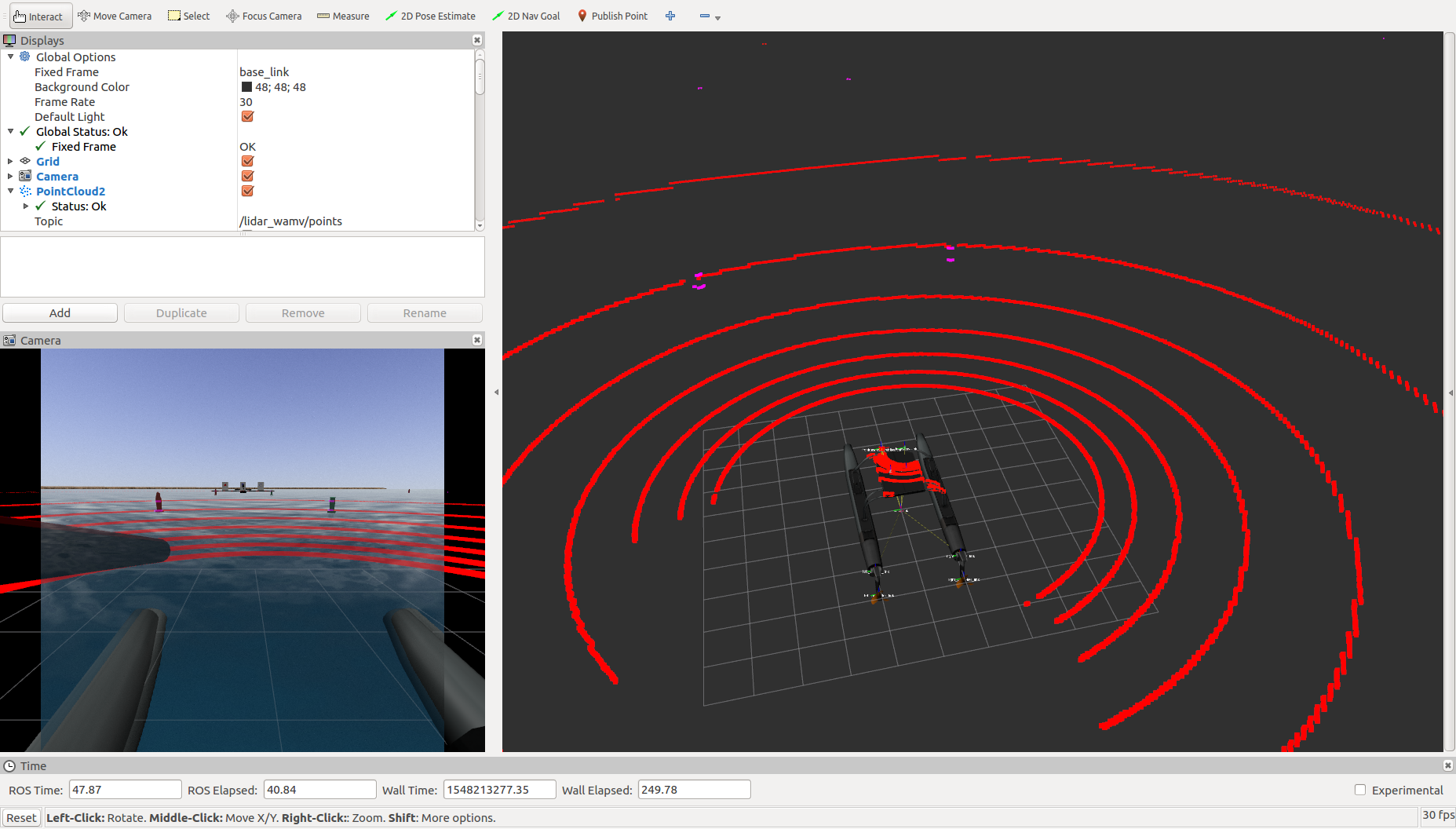
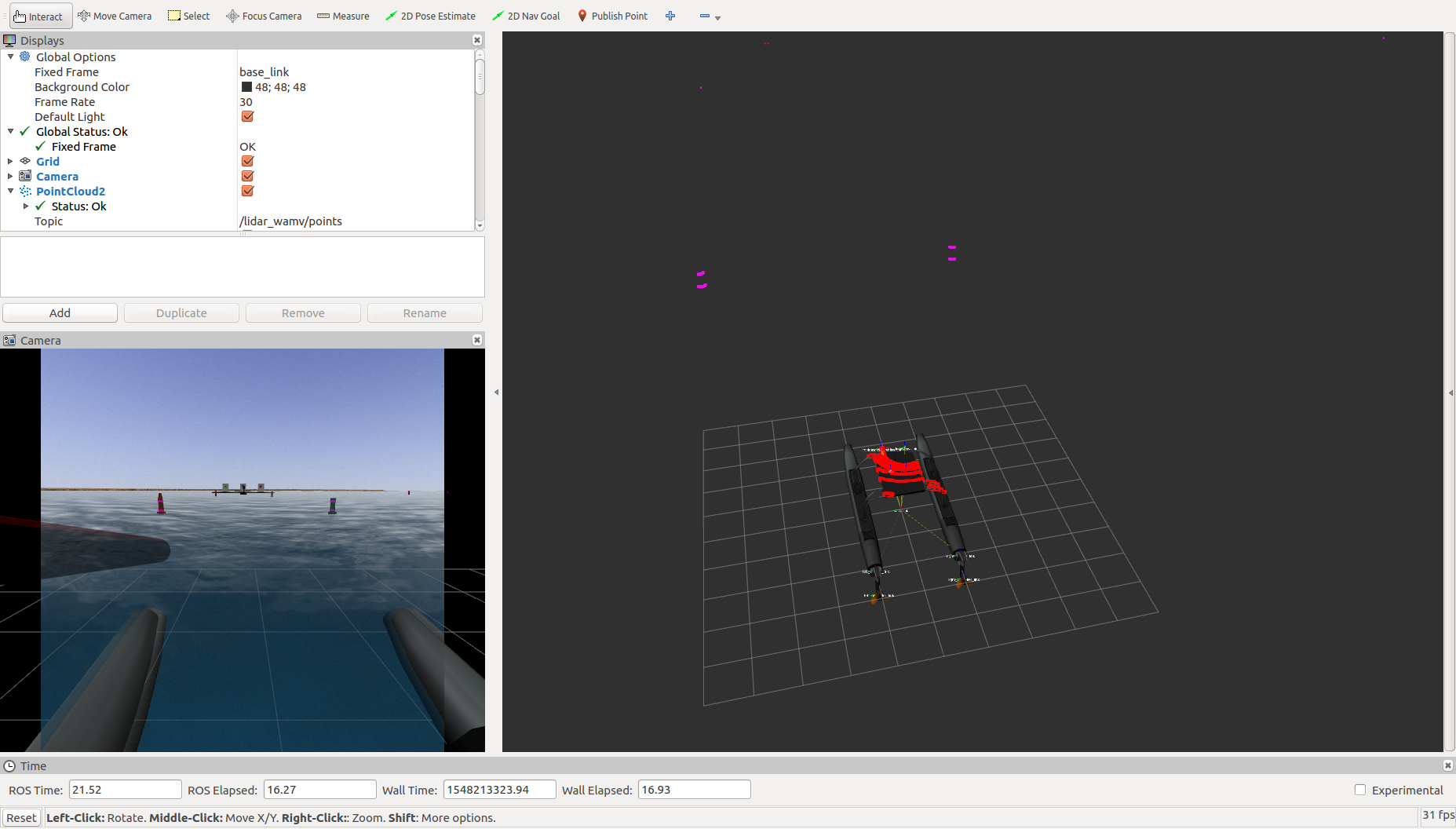
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare). HI Carlos, After some experimentation, the laser_retro tag is supported by the GPU velodyne_lidar plugin when applied to the visual element of the SDF description. However, all generated lidar returns within the maximum and minimum ranges will be returned even if they have a low intensity value. I have modified a version of the velodyne_simulator plugin that will optionally clip points that have an intensity that lies beneath a specified threshold. If the laser retro value of the ocean is set to a negative value, ocean points can then be removed from the lidar return while still detecting objects that have the default laser_retro value of zero. This version of the plugin can be found here: https://bitbucket.org/JonathanWheare/velodyne_simulator/src/master/ Without clipping. In this image the lidar has returned approximately 14,000 points. with clipping. In this image only approximately 2500 points have been returned by the lidar. Regards, |
{kind=link}
|
Original comment by Brian Bingham (Bitbucket: brian_bingham). Thank you @JonathanWheare. This seems very promising. I'll let Carlos comment on the details. Do we think that the velodyne_simulator folks will entertain a PR to implement this feature? From your fork it seems like a low-impact addition. |
|
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare). Hi Brian, I think it is a sensible enhancement to the simulator package. Regards, |
|
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare). Hi Carlos, I cannot tell you exactly how far through the water surface that a lidar will give a return, but I can state that my experience has been that such returns have been very rare. The west lakes image I linked to was an accumulation of several passes of the lidar, and beyond the vehicle, shore and test docking area (shown here: https://csem.flinders.edu.au/competitions/maritime_robotx/images/gallery/west_lakes_docking.jpg) only a small scattering of returns can be seen. I interpret these returns as coming from the water surface. There may be places where the water is shallow enough for a return to come from the floor, but in the RobotX course area, I expect such returns would be minimal. Thanks for your support, I will put together a pull request for velodyne_simulator. Regards, |
{kind=link}
|
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare). Hi Carlos, I just sent in pull request that should enable filtering of the returns. Note that by default, other objects in the world will still give zero intensity returns. Regards, |
|
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
Solved with https://bitbucket.org/DataspeedInc/velodyne_simulator/pull-requests/7/master/diff and pull request #79. Thanks @JonathanWheare ! |
Original report (archived issue) by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
This issue was discussed in pull request #41.
A potential solution might involve to play with visibility masks.
The text was updated successfully, but these errors were encountered: