Mini project for Vision Algorithms for Mobile Robots 2018. Implementation of a working, simple, monocular visual odometry (VO) pipeline with the following implementation details:
- Harris Corner Feature Detector
- 5 Point Algorithm for initial bootstrapping
- KLT Tracking of feature points across frames
- Triangulation of new landmarks
- Local pose refinement through optimization
- Release of a custom grocery store dataset
Jordan Burklund, Jose Vasquez, Ossama Ahmed, Yilun Wu
MATLAB R2018b with Computer Vision Toolbox, Image Processing Toolbox, Statistics Toolbox, Optimization Toolbox
Download KITTI, Malaga, Parking dataset and copy them under data folder and run main.m to start the pipeline!
Results benchmarked on a Macbook Pro 3.1 GHz i5-7267U, 16GB RAM with MATLAB R2018b
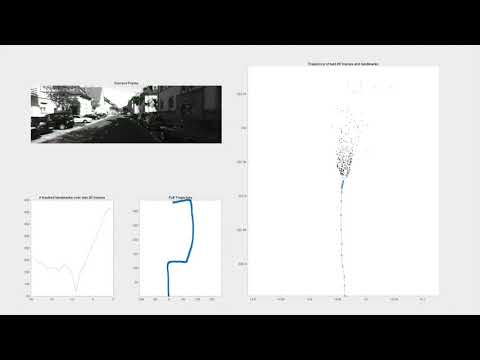
KITTI Dataset (~2 frames/sec)
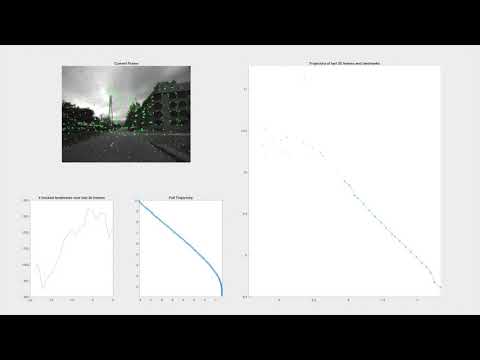
MALAGA Dataset (~1.6 frames/sec)
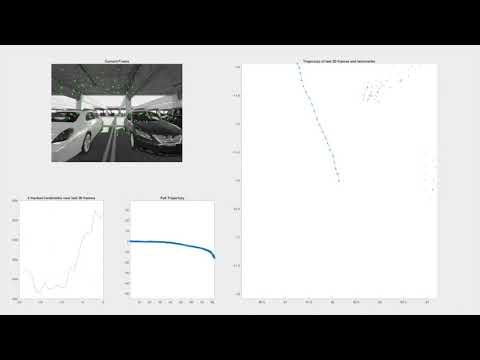
Parking Dataset (~1.4 frames/sec)
Grocery Store Dataset (~1.5 frames/sec)
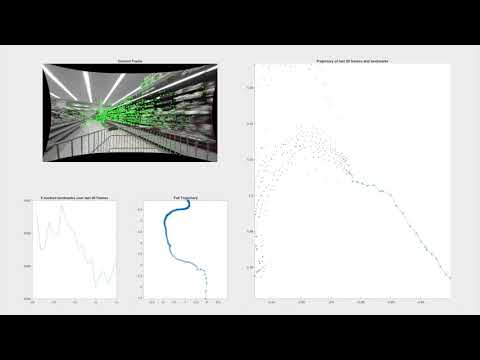
Image frames for the grocery store dataset can be found at: https://polybox.ethz.ch/index.php/s/4rvexuxYj4ZIymS
Extract the grocery folder from the compressed file, and put it in the /data folder with the other datasets.
To test with the grocery store dataset, set ds=3.