hand_instruction
The main vision behind the development of the robotic hand Parloma was to reach a comunication system for deafblind people.
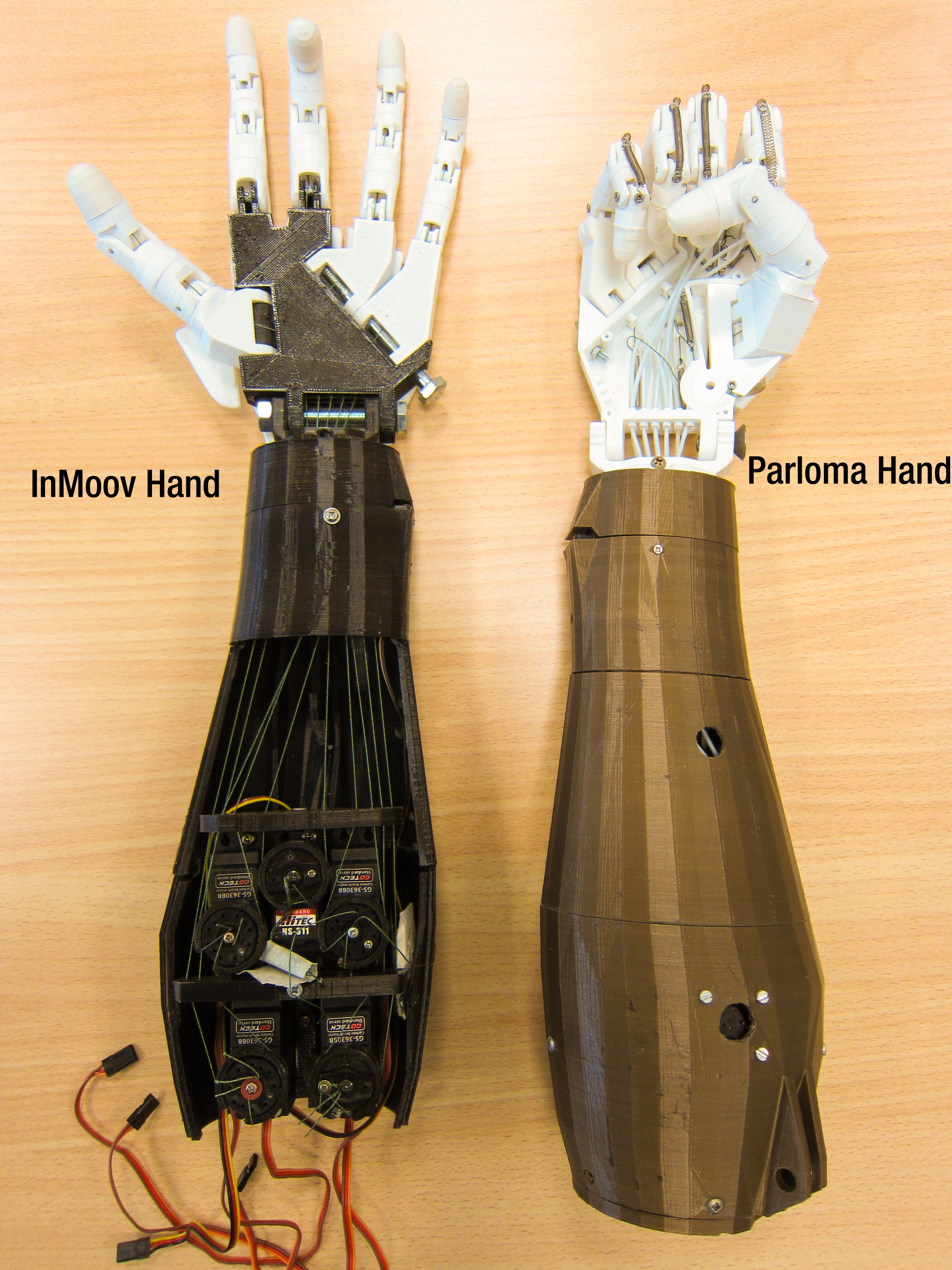
To reach this result we decided to develop it using low-cost prototyping technologies such as FDM 3D printing and Arduino/RaspberryPi microcontrollers. Locking at the state of the art we noticed that there where not much research on using these technologies in developing prosthetic hands. Otherwise we found a great project named InMoov which has the vision to develop an open source humanoid robot. The high grade of the anthropomorphism of the hand and the forearm developed in this project has led us to use them like a great starting point. Anyway there were much things to improve. Starting from the design of a motion system to allow index, middle and thumb adduction and abduction movments. We also introduced a spring based underactuation mechanism to allow human like movement to each finger.
First of all you have to access to a 3d printer (or a 3d printing service). Choose materials (we advise you to use PLA for the entire hand except for some parts).
Few advises for 3D printed parts. You should print them in PLA (nylon ones will be specified on the filename). It is a good choice to print at 60-70mm/s with the heated bed at 70°C. PLA Nozzle temperature depends on the nozzle diameter and the material quality. The files .stl Palmo_().stl are quite complicated and they require a fine print.
You should have at list these tools to correctly approach to the assembly of the Parloma Hand:
- Insulating Tape
- Screwdrivers with different measures
- Multipurpose Pliers
- Swiss Boxcutter

For finger assembly we recommend to take a look to the InMoov tutorials (Fingers are the same, we took them from InMoov project).
ecc..
The forearm is quite similar to the InMoov's forearm except for some modifications introduced in order to allow the usage of microservo motors to move abduction and adduction.
ecc..