A set of utilities to convert your Arduino board to a CC.Debugger for flashing Texas Instruments' CCxxxx chips. It currently supports the CC2540/41 chips (compatibility table) but with your help it can support any chip compatible with the CC.Debugger protocol.
Keep in mind but this more than just a set of utilities! It comes with complete, reusable Arduino and Python libraries for adding CC.Debugger support to your projects!
If you are just in hurry to flash your CCxxxx chip, follow this guide, however you should first check the compatibility table later in this document!
- Install the
Arduino/CCLiblibrary to your arduino IDE - Load the
CCLib_proxyexample and change the theLED,CC_RST,CC_DC,CC_DD_IandCC_DD_Oconstants to match your configuration. - Flash it to your Teensy/Arduino
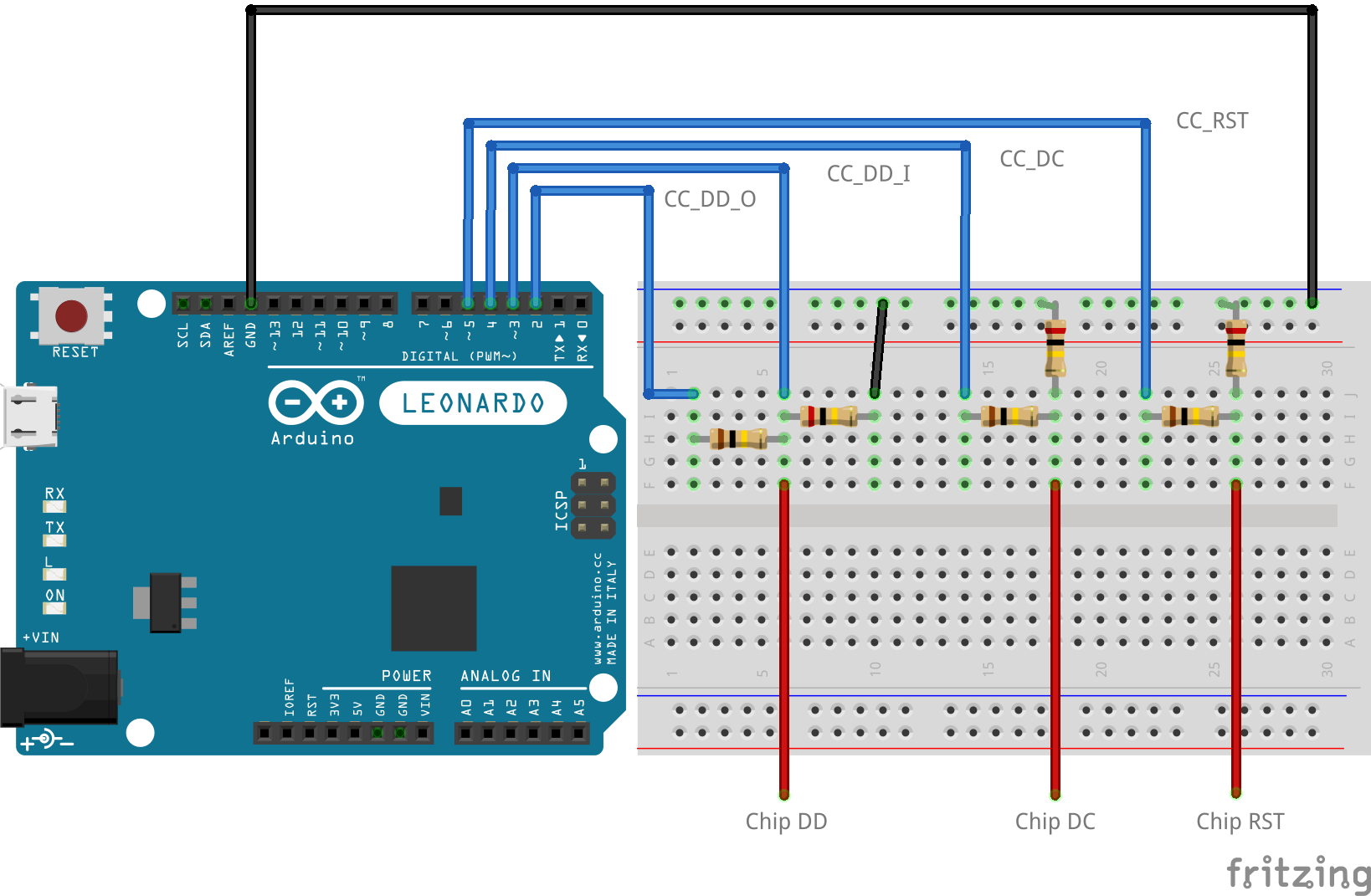
- We are going to need a voltage divider from 5V (arduino) to 3.3V (CCxxxx chip), therefore you will need to wire your arduino according to the following diagram:
For the DD Pin:
<CC_DD_O> --[ 100k ]-- <CC_DD_I> --[ 200k ]-- <GND>
|
{DD}
For the DC Pin:
<CC_DC> --[ 100k ]-- {DC} --[ 200k ]-- <GND>
For the RST Pin:
<CC_RST> --[ 100k ]-- {RST} --[ 200k ]-- <GND>
Where {DD}, {DC} and {RST} are the pins on the CCxxxx chip and <CC_DD_O>, <CC_DD_I>, <CC_DC>, <CC_RST> are the pins in your ardiuno board.
In an arduino/breadboard set-up, this looks like this:
- You will need Python 2.7 or later installed to your system
- Open a terminal and change directory into the
Pythonfolder of this project - Install required python modules by typing:
pip install -r requirements.txt - Test your set-up:
~$ ./cc_info.py -p [serial port]
If you see something like this, you are ready:
Chip information:
Chip ID : 0x4113
Flash size : 16 Kb
SRAM size : 1 Kb
USB : No
Device information:
IEEE Address : 13fe41b61cde
PC : 002f
However, if you see something like this, something is wrong and you should probably check your wiring and/or reset the arduino board or the CC board.
Chip information:
Chip ID : 0x4113
Flash size : 16 Kb
SRAM size : 1 Kb
USB : No
Device information:
IEEE Address : 000000000000
PC : 0000
The python utilities provide a straightforward interface for reading/writing to your CCxxxx chip:
- cc_info.py : Read generic information from your CCxxxx chip. Usage exampe:
~$ ./cc_info.py -p /dev/ttyS0
- cc_read_flash.py : Read the flash memory and write it to a hex/bin file. Usage example:
~$ ./cc_read_flash.py -p /dev/ttyS0 --out=output.hex
- cc_write_flash.py : Write a hex/bin file to the flash memory. You can optionally specify the
--eraseparameter to firt perform a full chip-erase. Usage example:
~$ ./cc_write_flash.py -p /dev/ttyS0 --in=output.hex --erase
- cc_resume.py : Exit from debug mode and resume chip operations. Usage example:
~$ ./cc_resume.py -p /dev/ttyS0
NOTE: If you don't want to use the --port parameter with every command you can define the CC_SERIAL environment variable, pointing to the serial port you are using:
~$ export CC_SERIAL=/dev/ttyS0
In order to flash a CCxxxx chip there is a need to invoke CPU instructions, which makes the process cpu-dependant. This means that this code cannot be reused off-the-shelf for other CCxxxx chips. The following table lists the chips reported to work (or could work) with this library:
| Chip | Chip ID | Driver | Status |
|---|---|---|---|
| CC2540 | 0x8d.. | CC254X | ✅ Works |
| CC2541 | 0x41.. | CC254X | 🔶 Looking for testers |
| CS2510 | 0x81.. | CS2510 | 🔶 Looking for testers |
Since the arduino sketch is quite simple, it's possible to support any CCxxxx device solely by creating a new chip driver. Even if your chip uses a different debug protocol instruction set (such as CC2510) you can modify it on-the-fly.
In order to create a new chip driver you should create a new file in the Python/cclib/chip folder with the name of your chip (for example cc2510.py), and create a new Python class, subclassing from the ChipDriver class. For example:
class CC2510(ChipDriver):
"""
Chip-specific code for CC2510 SOC
"""
@staticmethod
def test(chipID):
"""
Check if this ChipID can be handled by this class
"""
return ((self.chipID & 0xff00) == 0x8100)
def chipName(self):
"""
Return Chip Name
"""
return "CC2510"
def initialize(self):
"""
Initialize chip driver
"""
# Get chip info
self.chipInfo = self.getChipInfo()
# Populate variables
self.flashSize = self.chipInfo['flash'] * 1024
self.flashPageSize = 0x400
self.sramSize = self.chipInfo['sram'] * 1024
self.bulkBlockSize = 0x800
self.flashWordSize = 2And you must then register your class in the Python/cclib/ccdebugger.py
# Chip drivers the CCDebugger will test for
from cclib.chip.cc2540x import CC254X
from cclib.chip.cc2510 import CC2510
CHIP_DRIVERS = [ CC254X, CC2510 ]After that you need to implement all the functions exposed by the ChipDriver (available in Python/cclib/chip/__init__.py), but you can just copy the cc2540x.py driver and work on top of it.
We are looking forward for your support for new chips!
The protocol used between your computer and your Arduino is quite simple and not really fault-proof. This was intended as a pure proxy mechanism in order to experiment with the CC Debugging protocol from the computer. Therefore, if you interrupt any operation in the middle, you will most probably have to unplug and re-plug your Teensy/Arduino. That said, here is the protocol:
Since most of the debug commands are at max 4-bytes long, we are sending from the computer a constant-sized frame of 4-bytes:
+-----------+-----------+-----------+-----------+
| Command | Data 0 | Data 1 | Data 2 |
+-----------+-----------+-----------+-----------+
The only exceptions are:
- The brust-write command (CMD_BRUSTWR), where up to 2048 bytes might follow the 4-byte frame, and
- The instrunctionset update command (CMD_INSTR_UPD), were 16 bytes must follow the 4-byte frame.
The Teensy/Arduino will always reply with the following 3-byte long frame:
+-----------+-----------+-----------+
| Status | ResH | Err/ResL |
+-----------+-----------+-----------+
If the status code is ANS_OK(1), the ResH:ResL word contains the resulting word (or byte) of the command. If it's ANS_ERR(2), the ResL byte contains the error code.
Users have successfully flashed various BlueGiga BLE112/BLE113 (CC2540) modules with this solution, however the developers DO NOT GURANTEE THAT THIS WILL WORK IN YOUR CASE! The developers cannot be held liable for any damage caused by using this library, directly or indirectly. YOU ARE USING THIS CODE SOLELY AT YOUR OWN RISK!
Copyright (c) 2014-2016 Ioannis Charalampidis
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.