libPointCloud SDK is a cross-platform library for PointCloud.AI® DepthEye™ depth cameras.
Developer kits containing the necessary hardware to use this library are available for purchase at pointcloud.ai/buy .
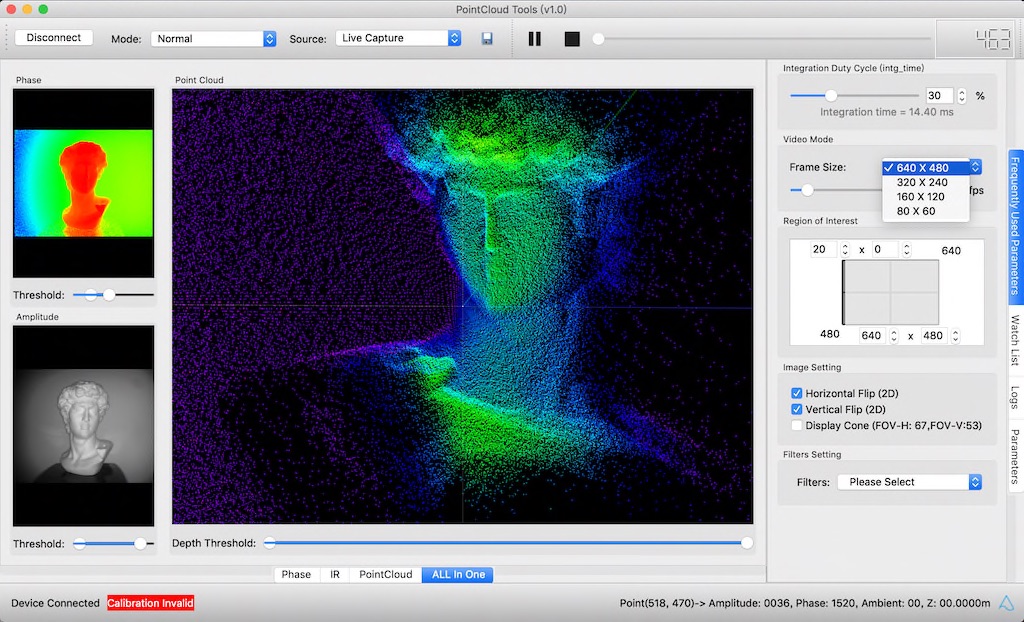
The IMX556 is a fully integrated optical Time-of-Flight (ToF) camera sensor. The sensor features 640 x 480 (VGA) time-of-flight pixels based on the DepthSense® pixel technology. Combined with a modulated light source, this sensor is capable of measuring distance and reflectivity with VGA resolution.
- Back-illuminated Time-of-flight image sensor ◆High signal to noise ratio (SNR)
- Full resolution @max60 frame/s (4phase/frame) ◆Pixel binning readout function
- Independent flipping and mirroring
- Built-in temperature sensor
- Unit cell size : 10.0 um (H) × 10.0 um (V)
- Operation temperature : -30 to +75 ̊C
- Performance guarantee temperature : -10 to +60 ̊C
| What | Description |
|---|---|
| Dependent library files | We provide SDK for those platforms : Linux \ Mac OS \ Windows \ Android. |
| Code Samples | These simple examples demonstrate how to easily use the SDK to include code snippets that access the camera into your applications. Check some of the C++ examples including capture, pointcloud and gesture recognition. |
| Tools | PointCloudTool is a visualization tool which is based on the libPointCloud SDK API. |
| Wrappers | Python API, ROS, OpenCV and more to come |
Please add one usb hub with Independent power supply. Then insert the double head USB cable together on the USB hub and connect the usb hub to your PC.
To install vim and cmake, please run:
sudo apt-get install cmake vim
Please run # uname -a to check system platform version first.
| Plateform | SDK Path |
|---|---|
| MacOs | /libs/macos |
| Ubuntu | /libs/ubuntu |
| Windows | /libs/windows |
Modify .bashrc to set environment variables:
# vim ~/.bashrc
add below source code to the end of bashrc file:
export POINTCLOUD_SDK_PATH="your_directory/libs/ubuntu"
export PATH=$POINTCLOUD_SDK_PATH/lib:$POINTCLOUD_SDK_PATH/bin:$PATH
PS:Please remember to replace ubuntu with your system platform.
We need to make above changes come into effect:
# source ~/.bashrc
Finally, echo the constant to verify :
# echo $POINTCLOUD_SDK_PATH
(For Ubuntu only)
./config/setupDriverOnLinux.sh
In the root directory of SDK, run below commands one by one:
$ mkdir build
$ cd build/
$ cmake ..
$ make
You can get message as below :
[100%] Built target DepthAscii
Plug the module and run it:
./bin/DepthAscii
You can see the result!

Learn more to use libPointCloud at our wiki.
Please send mail to dev@pointcloud.ai. We will reply you asap.
Check or raise issue on [Issue tracking] (https://github.com/pointcloudAI/libPointCloud/issues)