{kind=link}
{kind=link}
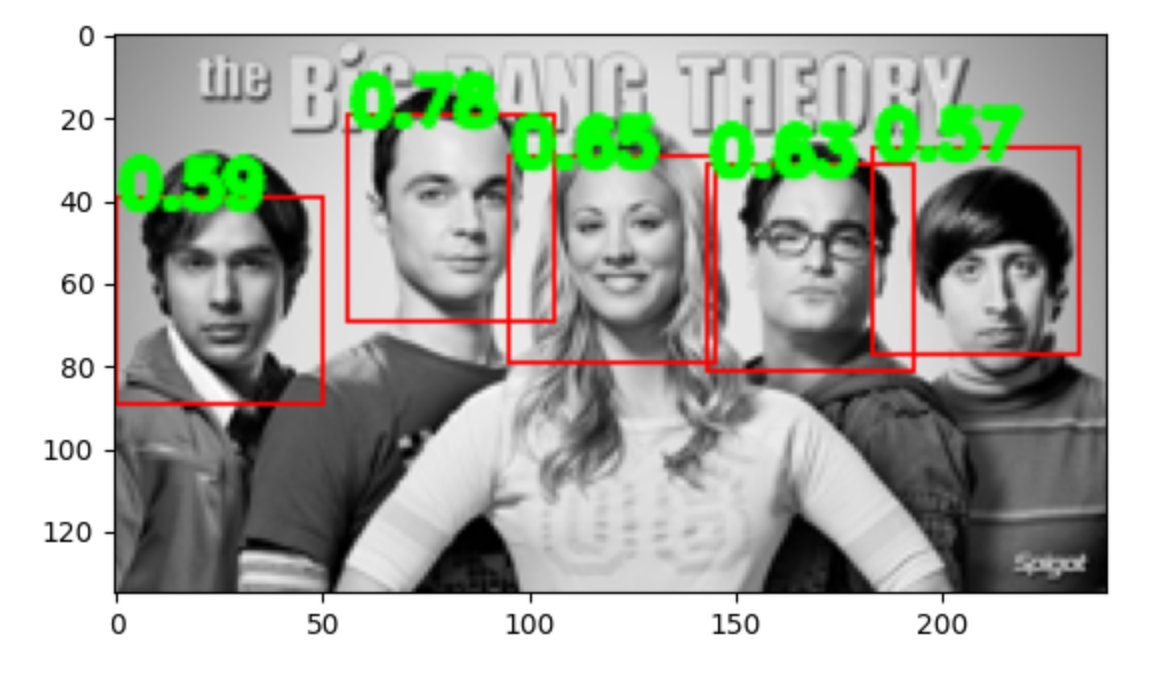
A face detection computer vision algorithm that uses Sobel filters, NCC thresholds, and a histogram of oriented gradients to detect faces. Prunes bounding boxes with an intersection of union overlap checking step.

The main driver function, performs the image normalization, calls all of the other functions in the appropriate order, and then calls the visualization function to represent the output.
Generates the sobel filter used for edge detection, for both the x and y directions, allowing the hog to test for both vertical and horizontal edges.
Applies the given filter (Sobel in this algorithm) to the provided image. It does this by padding the image to remove edge overlaps and then iterating through all the pixels and multiplying the pixel intensity values by the filter in a 3x3 radius. For Sobel this emphasizes edges and suppresses non edge values.
Generates a gradient descent map represented by a map of the gradient angles and a map of the gradient magnitudes. It calculates these by iterating through the two filtered images of the x and y edge values and doing the gradient descent math on each pixel.
Takes in the generated gradient maps of the angles and magnitudes and categorizes every pixel into a cell based histogram, it does this by creating a bin map, and assigning every pixel based on the angle of its gradient, it then adds each histogram into its respective bin and returns the histogram.
Normalizes the given histogram to the provided block size, vectorizes the output
Generated a HOG from the template image, then iterated through the pixels of the target image testing every template-sized section’s HOG for a correlation match to the template HOG using an NCC threshold of 0.57. It then prunes that list of bounding boxes by removing any that have an IoU > 0.5 with the highest scoring bounding boxes. Returns the remaining bounding boxes as the best candidates.