This template will get you set up using ROS2 in VSCode as your IDE. It is structured as follows:
├──ros1-2-ignition
│ ├──setup-ign-ardupilot-sitl.sh
│ ├──ardupilot
| | └── ...
│ ├──ardupilot_gazebo
| | └── ...
│ ├──ros2_ws # ROS Foxy workspace
| | ├── src
| | | ├──bluerov2_ignition # Code for Bluerov2 simulation in Ignition
| | | ├──remaro_worlds # Ignition simulated environments
| | | └── ...
│ | └── ...
│ └── ...
└── ...
Note that ardupilot, bluerov2_ignition and remaro_worlds are included in this repository as git submodules.
ROS need sourcing of its setup files. Since we have both ROS1 and 2, we need to source the ROS versions that we are using (usually ROS2). Some shortcuts are defined in the .bashrc file for convenience. They are listed here:
sf: as in source foxy, resolves to 'source /opt/ros/foxy/setup.bash'sn: as in source noetic, resolves to 'source /opt/ros/noetic/setup.bash's: as in source (local), resolves to 'source install/setup.bash' to source local environment in ROS2m: as in make, resolves to 'bash build.sh', requires a build script to be present in the local directory
In this hackaton, you will source ROS2 (foxy), and therefore type sf and s. Note that s must be run from ros2_ws directory.
Now, let's get hands-on!
- Install docker on your machine. You can find instructions here
- Allow non-root users to manage docker. Instructions here
- Install VSCode. Instructions here
- Clone the hackaton's repo in your computer:
$ git clone https://github.com/remaro-network/tudelft_hackathon.git- Go to the folder containing this Dev container (i.e. ros1-2-ignition folder)
- Open it from VSCode (File->Open Folder).
- click on the little green square in the bottom left corner, which should bring up the container dialog
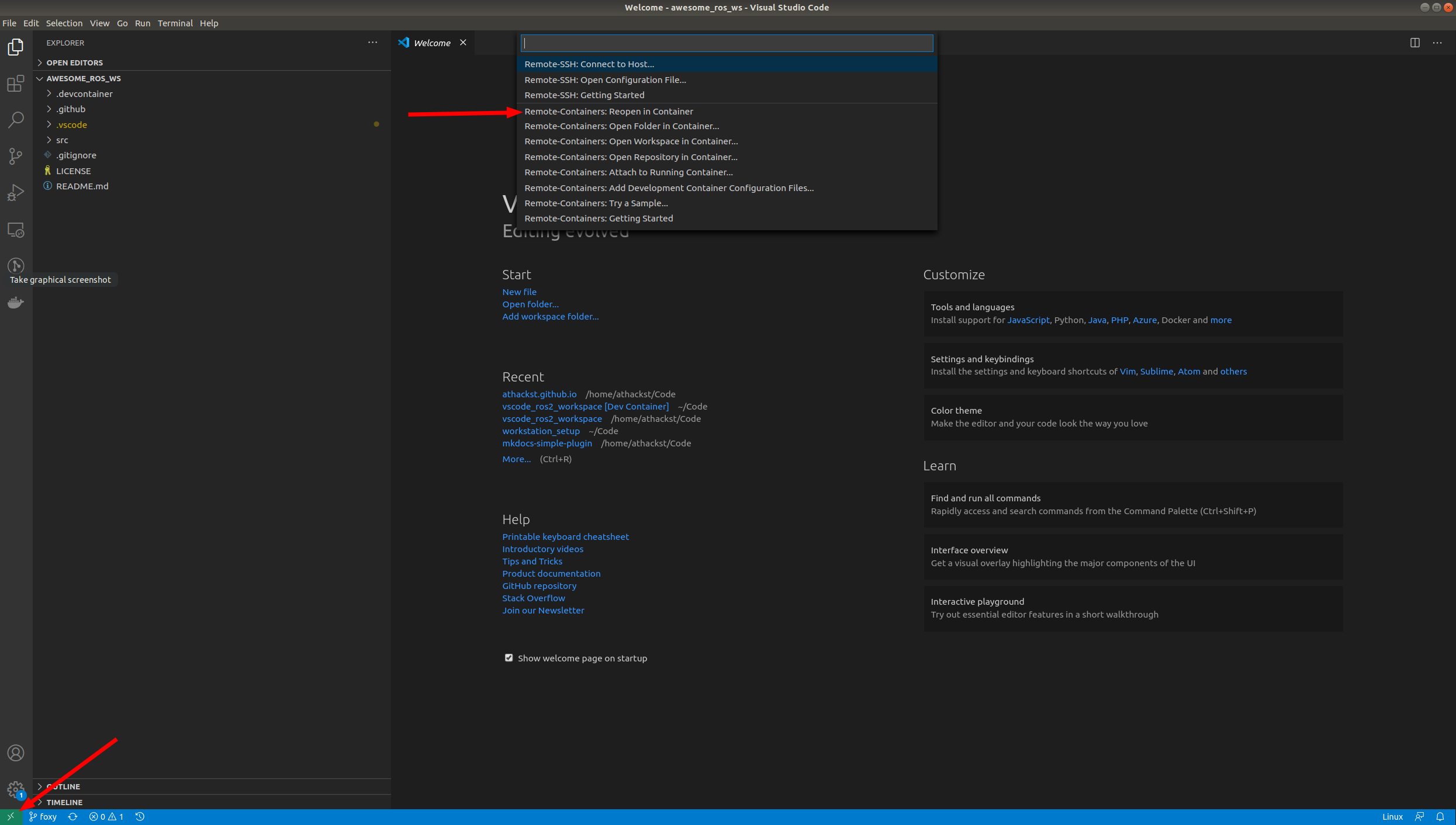
- In the dialog, select "Remote Containers: Reopen in container"
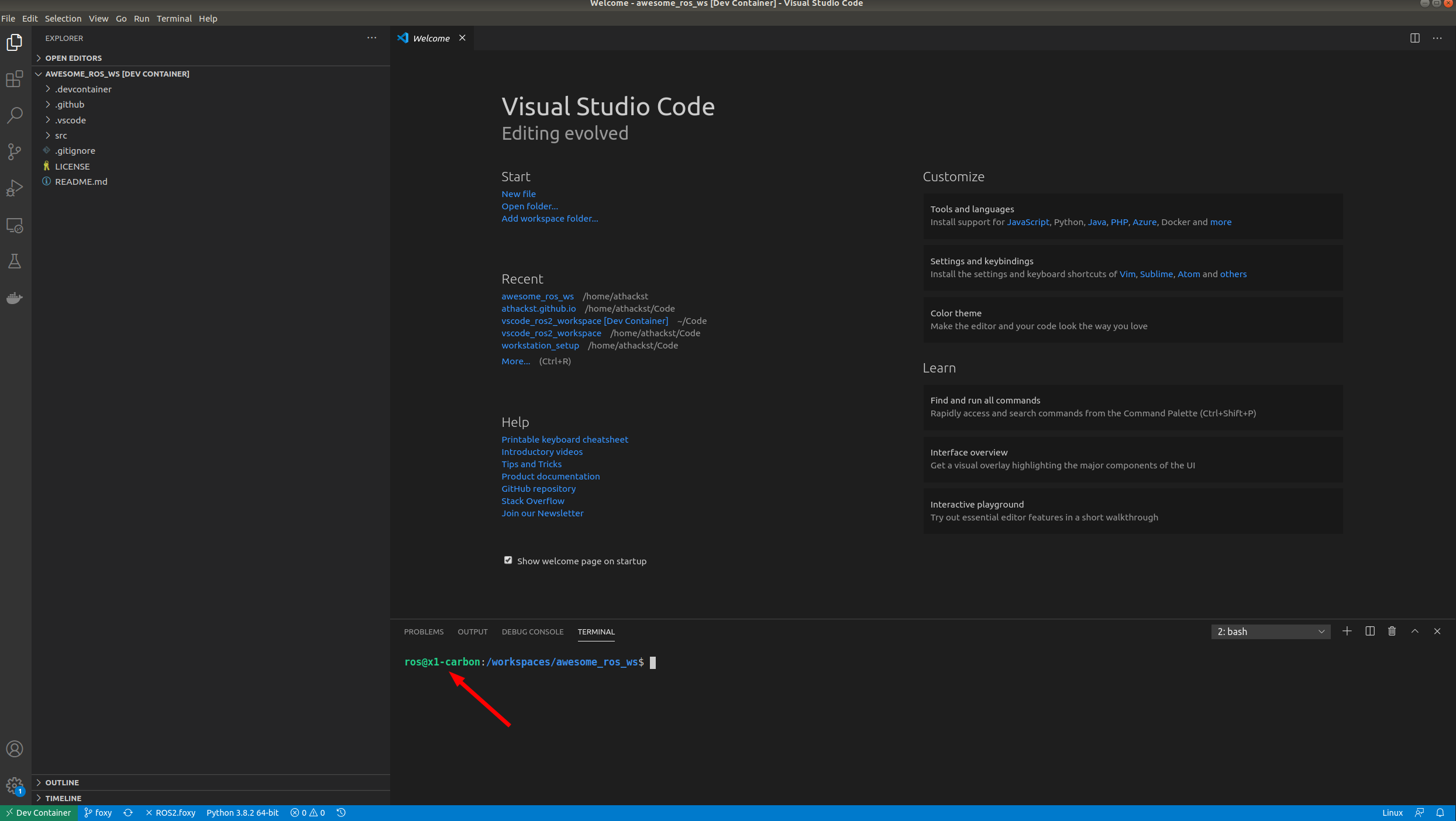
VSCode will build the dockerfile inside of .devcontainer for you. If you open a terminal inside VSCode (Terminal->New Terminal), you should see that your username has been changed to ros, and the bottom left green corner should say "Dev Container"
- If you want to work in your docker container from terminator (which I strongly recommend), type
terminatorin the VSCode terminal.
Run Ardupilot with software in the loop (SITL):
$ sim_vehicle.py -L RATBeach -v ArduSub --model=JSON --out=udp:0.0.0.0:14550 --console
In another terminal (in terminator you can use ctrl+shit+e to split the terminal vertically) run:
$ ros2 launch tudelft_hackathon bluerov_bringup.launch.py simulation:=true