In this project, PointNet is leveraged for the segmentation of parts of a certain shape in the form of point cloud data. The data points are obtained from the ShapeNet dataset, i.e., ShapeNetCore. This project chooses the shape of a motorbike. PointNet is utilized due to its nature, which is invariant to permutation. Keep in mind that point cloud data has zero care for the spatial relationship between points in the point cloud, even though it stores information regarding the object's location in the space. In other words, the order of points must be negligible and not influence the result.
Proceed to the following link to unveil the implementation shrouded in the cloud of secrets.
The numeric values below bespeak the performance of the model.
| Test Metric | Score |
|---|---|
| Loss | 0.169 |
| IoU | 0.885 |

The loss curve on the training set and the validation set of PointNet.

The IoU curve on the training set and the validation set of PointNet.
Click the following image to see the interactive result of the model.
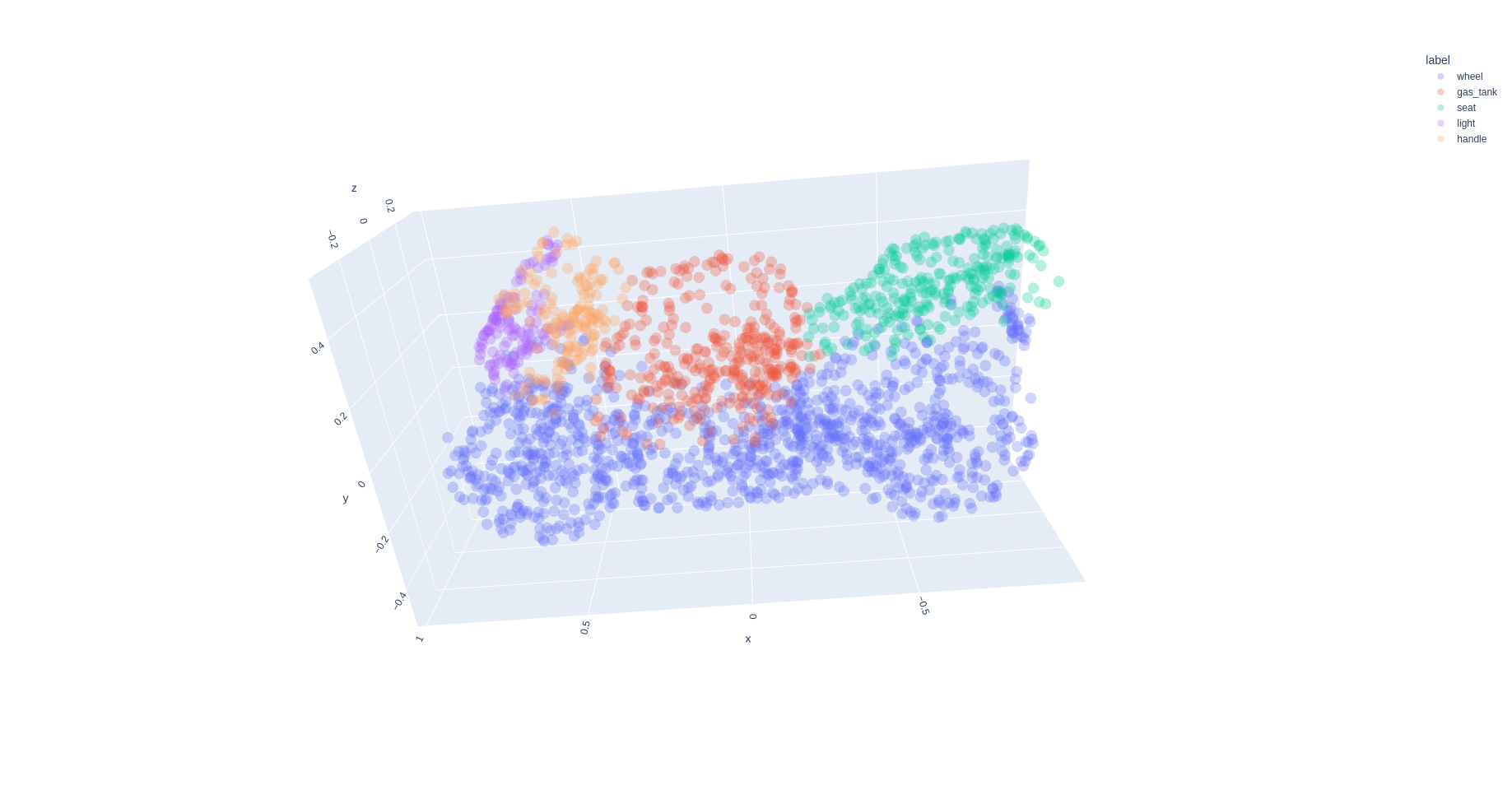 The segmentation result for the motorbike subcategory of the ShapeNet dataset with the labels: wheel, seat, gas_tank, light, and handle.
The segmentation result for the motorbike subcategory of the ShapeNet dataset with the labels: wheel, seat, gas_tank, light, and handle.