Member function naming in system_interface.cpp #269
Comments
|
It looks like this is pretty widespread throughout the codebase |
|
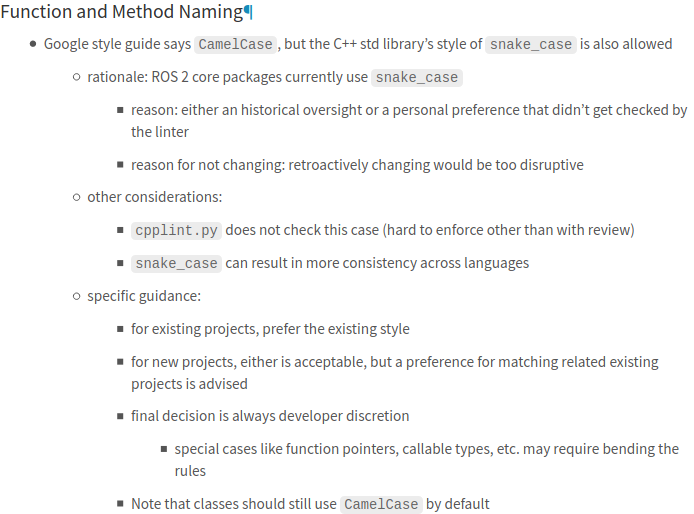
ROS 2 C++ code style allows From Code style and language versions - C++ - Style: Function and Method Naming: |
|
Cool. Maintainers, feel free to close the issue |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
These member functions defy the Google style guidelines and the ROS C++ style guidelines. Was that intentional or should we change them?
hardware_interface/system_interface.hpp
For example,
export_state_interfaces()should beexportStateInterfaces()per ROS1 styleGoogle style guide: https://google.github.io/styleguide/cppguide.html#General_Naming_Rules
ROS1 style guide: http://wiki.ros.org/CppStyleGuide#Function_.2F_Methods
I'm happy to make a cleanup PR if needed
The text was updated successfully, but these errors were encountered: