rpicopter/mw-config
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation
MultiWii configurator
Introduction
==============
MultiWii is a open-source software to control multirotors. It is designed to run on 8bit boards like Arduino. When configured, compiled and flashed it turns the board into a flight-controller.
mw-*nix
==============
This project aims to simplify and extend the functionality of MultiWii by providing set of packages such as mw-mavlink (that makes MultiWii mavlink capable so you can use i.e. QGroundControl), mw-ws (that allows user to monitor and control MultiWii through a web-browser), mw-ps3 (to fly MultiWii using a PS3 controller), mw-cli (to control it from a command line), or mw-config (to configure, compile and flash MultiWii without the use of any additional programmers).
All of this is achieved through the use of a driver (mw-service) that it designed to run on a auxiliary *nix SoC board like Beagleboard, Raspbery Pi, Odroid, etc (the SoC has to be running an *nix OS)
-----------------
---------- ---------- Link | QGroundControl |
| MultiWii | ---uart--- | SoC | - - - - - Wifi/Bluetooth/etc - - - - - - | Web browser |
---------- ---------- | cmd / ps3 |
-----------------
To make the full use of the functionality it requires the multirotor to carry 2 boards - MW & SoC.
mw-config
==============
This is a *nix package (part of mw-*nix) that allows users to:
- configure, compile and flash MultiWii through webbrowser
- monitor other MultiWii *nix services like mavlink
It contains set of scripts and a website to be installed on the host board (running *nix).
Requirements
==============
- *nix board with uart interface (i.e. Raspberry Pi / Beagleboard)
- local http server (i.e. apache, nginx) with PHP 5.2.0 or greater
- build tools (autotools, libtool, automake, arduino-mk, binutils-avr, gcc-avr, avr-libc)
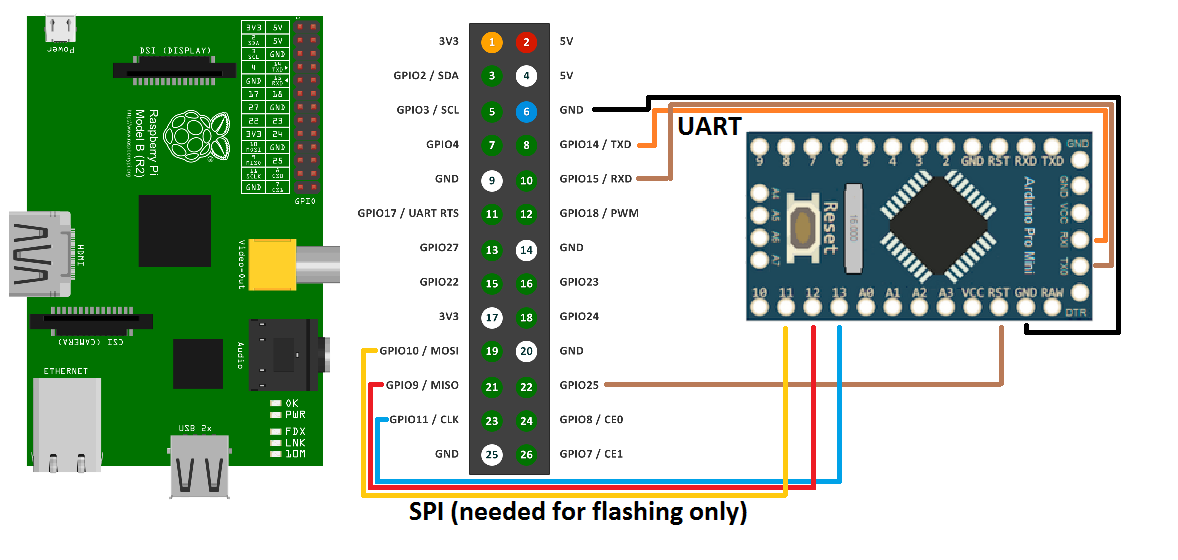
- for automatic flashing: spi interface and avrdude package
To use the automatic flashing functionality the host board requires to be interfaced with avr over spi.
See: https://raw.githubusercontent.com/rpicopter/mw-config/master/www/img/wiring.png
Installation
==============
- ./autogen.sh
- make & sudo make install
- copy www folder into your http folder (suggest to rename it to 'config')
- execute mw-config-start.sh (you might want to run it on every boot i.e. using rc.local)
Running
==============
- open a web browser and navigate to help screen for further instructions if needed
Other notes
==============
mw-config-start
This is a script that starts all services that are defined in $(sysconfdir)/mw (i.e. /usr/local/etc/mw)
{kind=link}
About
MultiWii web configurator
Resources
Stars
Watchers
Forks
Releases
No releases published
Packages 0
No packages published