Sparse voxel for pointset alongside features #182
Comments
|
Given that you know which points are inside your voxels (e.g, based on a given index for each point), you can utilize scatter_mean(x, index, dim=0, dim_size=num_voxels)Hope this helps! |
|
Hello @rusty1s thanks for your very prompt response. Sorry I didn't follow what you refer to as index in your example? Is this the following? |
|
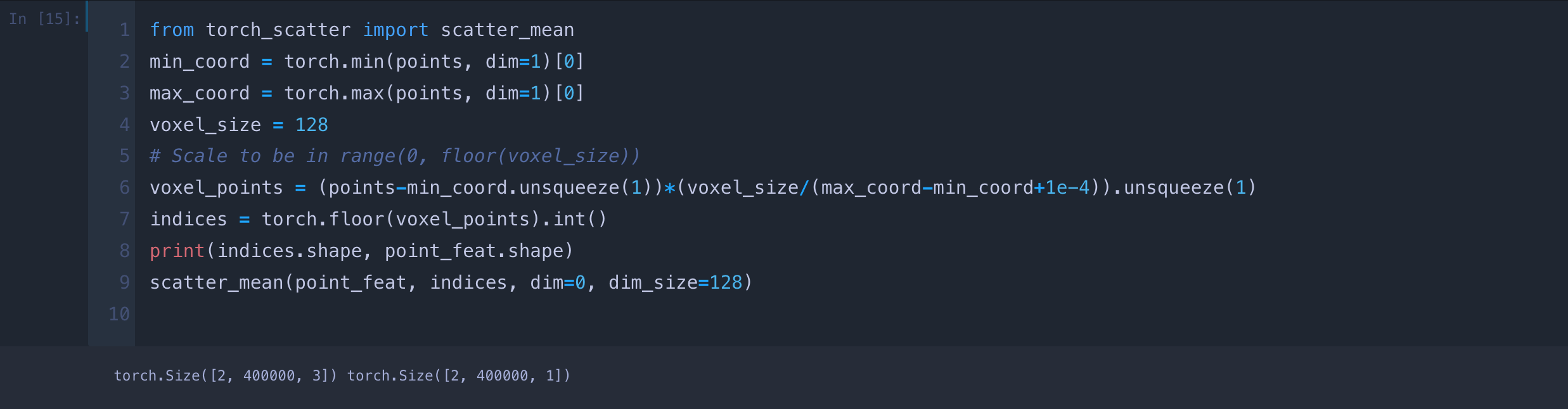
@rusty1s I think i have a decent understanding of your point, but I'm facing this error with using
The traceback I want the scattering (as mean) to take place over a 3D voxel whose indices are in |
|
The issue is that your current import torch
from torch_scatter import scatter_mean
from torch_cluster import grid_cluster
sample = torch.randn(100, 3)
cluster = grid_cluster(sample, size=torch.tensor([0.5, 0.5, 0.5]))
clustered_pos = scatter_mean(sample, cluster, dim=0) |
|
@rusty1s Thank you very much! I've a follow-up question. In addition to In this example, |
|
Mh, one way I could think of is to use a hierarchical version based on larger grid sizes, and then you would only replace the voxel information with more fine-grained information in case there exists any points in those voxels. |
|
This issue had no activity for 6 months. It will be closed in 2 weeks unless there is some new activity. Is this issue already resolved? |
Hello.
I have a (B, N, 3) pointsets and (B, N, 1) pointwise features which I wish to voxelize. The goal of this voxelisation is to be able to query from the voxel, (approximated) feature at any given point with minimal computation time. For example, given a new point and I wish to compute its feature, with a voxel representation, I can interpolate from neighbouring nodes of the given point, which is easy to compute knowing the edge information. Alternatively, I can use KNN , but when N is large (typically 1million), this operation is quite slow.
I can construct my voxels from pointset using torch.histogram, then what is a better choice to fill those voxels with my features? I tried to use
torch_sparse.coalescebut when I query a known location, the features do not match. Can someone please help me out?Thank you.
The text was updated successfully, but these errors were encountered: