{kind=link}
For more info visit
wiki: https://wiki.searchwing.org/en/home/Development/Payload-Camera/searchwing-bilderkennung
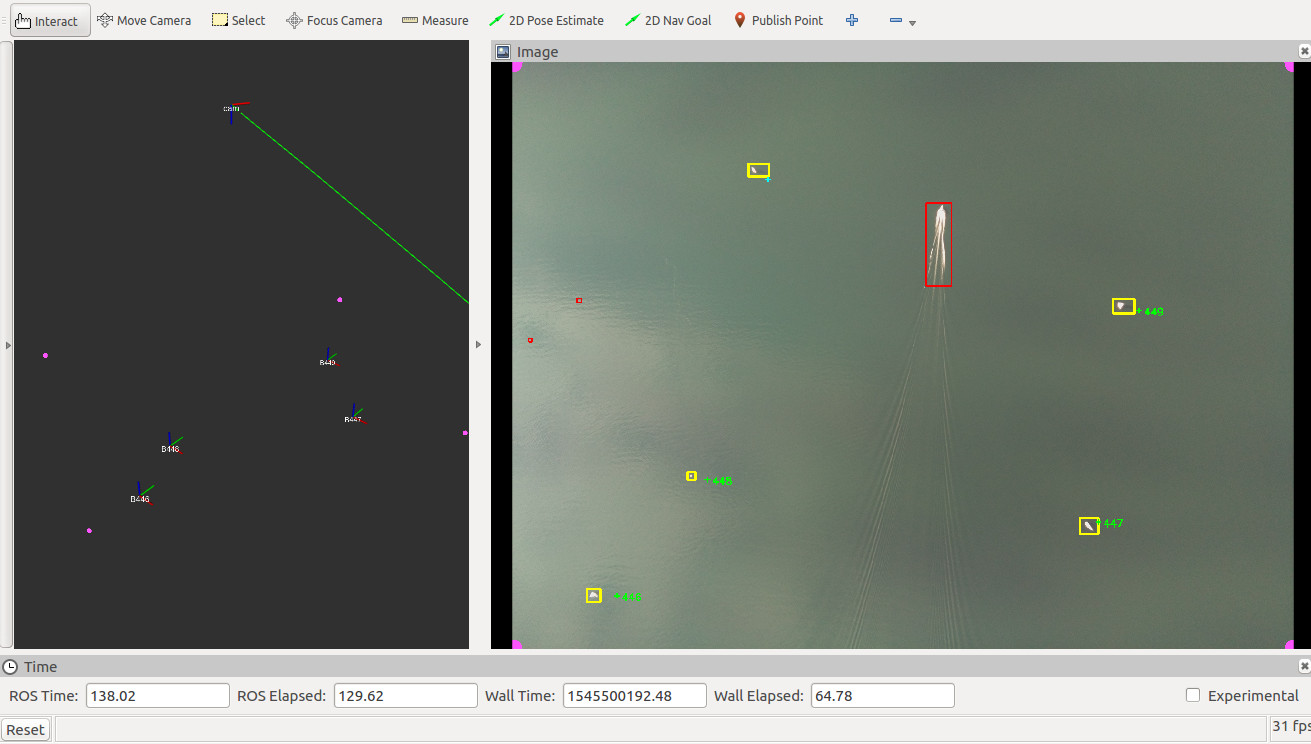
- Left: 3D View
- "Cam": 3D-Position and orientation of drone camera
- Pink points: the visible area in the image
- Coordinates: possible tracked boats with their ID
- Right: 2D View
- Yellow boxes: Regions of Interest(ROIs) in the current image which will be associated to existing trackings
- Red boxes: ROIs in the image which are too big
- Green crosses: Tracked positions (with ID) which got recognized over several frames and therefore considered as boats
- Blue crosses: Tracked positions which were created in previous frames
Install Opencv3 for python 2.7:
python -m pip install opencv-python
ROS handles the communication between the different modules, transforms 3d-data and provides a handy 3d visualization for development
- Short introduction to ROS
- Install a ros-desktop-version for your specific OS : http://wiki.ros.org/melodic/Installation
- create a catkin_workspace to compile the ros-specific code: http://wiki.ros.org/catkin/Tutorials/create_a_workspace
- git clone this repo
cd /catkin_ws/src/
https://github.com/searchwingCV/droneCamBoatDetector.git
- Compile/install
cd /catkin_ws
catkin_make install
source /catkin_ws/devel/setup.bash
- Download the bodenSee2018HalfRes.bag dataset: https://cloud.hs-augsburg.de/index.php/s/fgXNLN2Qza6ercr
- New Terminal: Start roscore
roscore
- New Terminal: Start dataset playbag.
cd datasetDownloadPath
rosbag play bodenSee2018HalfRes.bag --clock --start=0 --rate=2
- New Terminal: Setup environment:
source /catkin_ws/devel/setup.bash
Start boatdetector:
roslaunch searchwing bodenseeDataset.launch
Now you should see the detections in rviz like in the screenshot above.
If you want to edit/start/debug the boadDetectorNode.py with a editor, please ensure you run
rosparam set use_sim_time true
before you start the editor in the terminal. Also comment out the start of the node in the bodenseeDataset.launch file.