A PRM based non-holomic constraints based global planner implementation for ackermann vehicles. It is also capable of generating reverse paths.
- Sample the C-space and collect collision free vertices
- Non-holonomic edge generation using steering curves
- Shortest Path Search over the roadmap
Update constants.h file with the vehicle params
go to the catkin workspace and build the package
catkin build non-holonomic-prm-plannerPublish the obstacles polygons
(Make sure to pass one of the files provided in the obstacles folder)
rosrun polygon_publisher polygon_provider_new_csv.pyPublish the global costmap
rosrun global_costmap_publisher costmap_publisher_offline.pyRun the PRM node
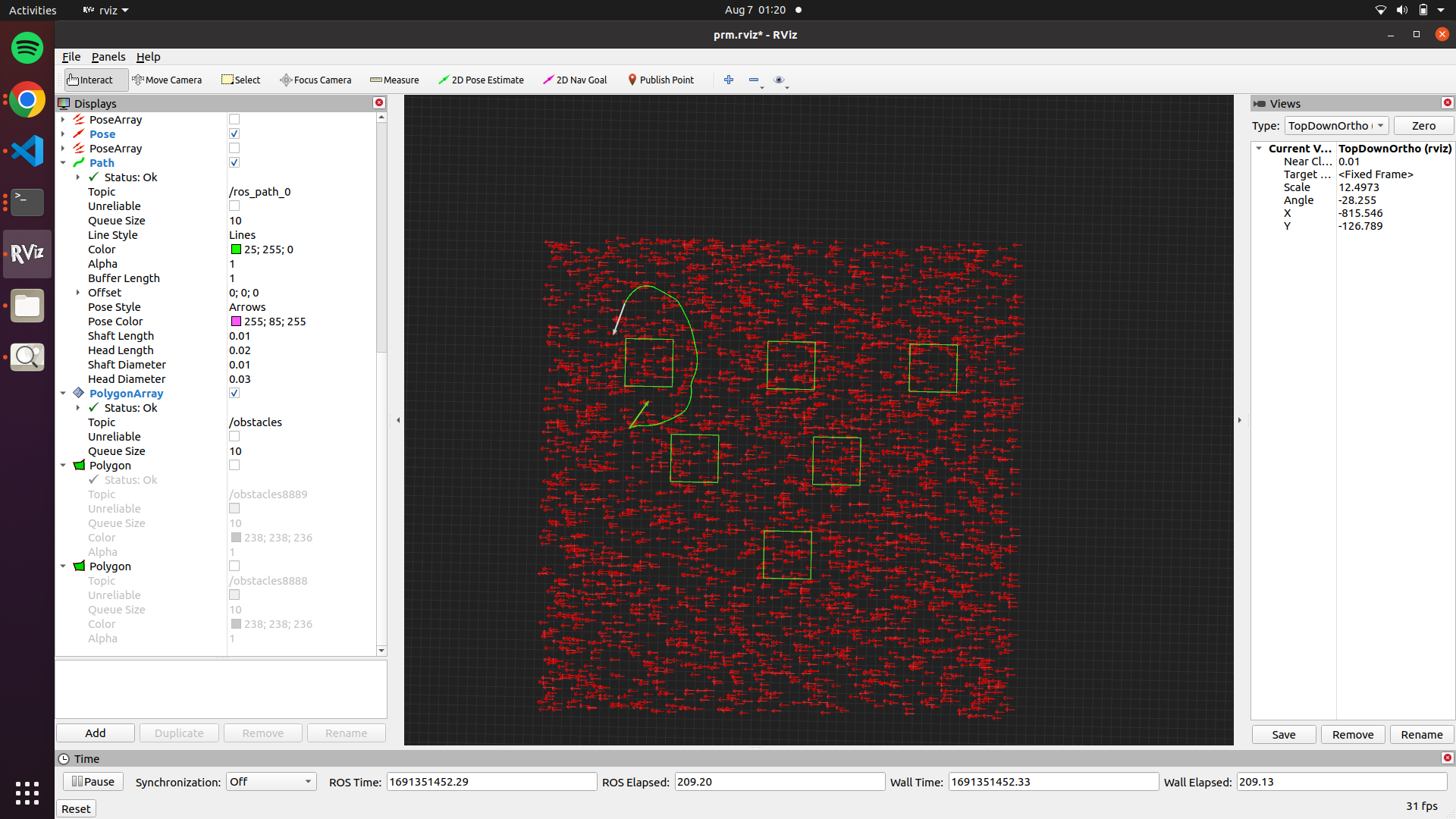
rosrun non-holonomic-prm-planner non-holonomic-prm-plannerRun Rviz and pass the config file in the Rviz folder
- collisiondetectionpolygon.h => manages collision detection between convex polygons
- pathgenerator.h => responsible for generating a collision free path between the start and the goal points, given a roadmap
- sampler.h => implementation of intial sampling strategies
- roadmap.h => responsible for the roadmap generation
- kdtree.h => responsible for kdtree generation from the initial sampled points
- robotmodel.h => basic robot model representation
- steeringcurve.h => non-holonomic constraints modelling used to generate the roadmap
- utils.h => helper functions
- visualization.h => constains visualization helpers to see the generated roadmap, steering curves and the final plan


- Create launch file
- Parametrize ackermann vehicle params