How To Build Smart FoosBall with GoKit
主要解决以下问题:
- 红蓝双方的进球自动探测、自动计数(goal)
- 实时显示当前双方进球数(blue_goals, red_goals)
- 实时显示当前双方胜负局数(blue_score, red_score)
- 进球后标记进球位置,默认为进攻方前锋进球,可修改记录后卫进球或者对方前锋、后卫乌龙球(goal_member)
- 清除当前计分,全新开始(game_control:start)
- 双方交换场地进行下一局(exchange_position,通过按键操作)
- 交换前锋、后卫位置(exchange_member,通过按键操作)
- 取消进球(game_control:cancel_red_goal&cancel_blue_goal)
最终定义如下(数值类型分辨率均为 1,增量均为 0):
| 标识名 | 显示名称 | 读写类型 | 数据类型 | 取值范围 |
|---|---|---|---|---|
| blue_goals | 蓝方进球数 | 只读 | uint8 | 0 - 10 |
| red_goals | 红方进球数 | 只读 | uint8 | 0 - 10 |
| blue_score | 蓝方赢局数 | 只读 | uint8 | 0 - 5 |
| red_score | 红方赢局数 | 只读 | uint8 | 0 - 5 |
| goal | 进球 | 只读 | 枚举 | none,red,blue |
| goal_member | 进球队员 | 只读 | 枚举 | none,red_van,red_rear,blue_van,blue_rear |
| exchange_member | 交换球员位置 | 只读 | 枚举 | none,red,blue |
| exchange_position | 双方交换场地 | 只读 | 布尔值 | |
| game_id | 场次 | 可写 | uint8 | 0 - 254 |
| game_control | 游戏控制 | 可写 | 枚举 | going,start,cancel_red_goal,cancel_blue_goal |
- 使用开发者账号登录机智云开发者网站 http://site.gizwits.com
- 点击新建设备接入按钮
- 输入设备名称和其他信息,点击添加按钮并一直选择下一步直到完成

- 完成后,选择该产品,并在左边菜单项中数据点进入数据点编辑页面,再使用右边的新建数据点按钮按个添加数据点
- 编辑完成之后,选择左侧菜单项“产品开发资源”,滚动页面到“MCU 开发资源”部分,点击“机智云接入串口通信协议文档”下载 MCU 开发文档,就可以着手开始硬件开发了
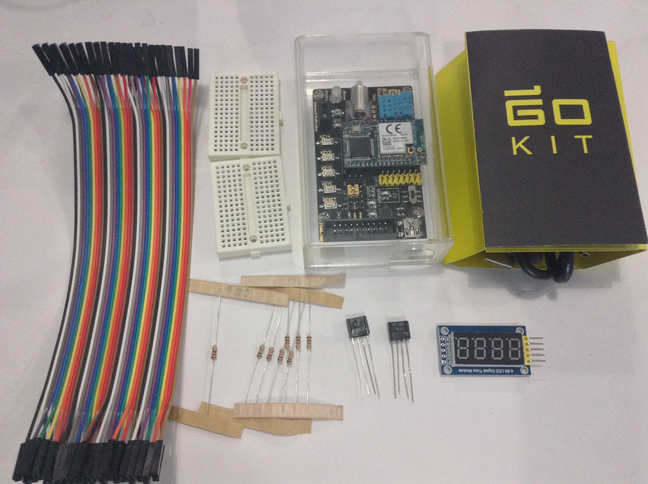
- 机智云免费申请的 GoKit 一块
- 3路 IO 口的四位数数码管模块一只,用于比分显示
- ST188 反射式红外光电传感器(与 GoKit 内置红外传感器型号一致)两个,用于进球检测
- 40P杜邦线若干
- 面包板和电阻若干
- 数据点部分下载的“机智云接入串口通信协议文档”
- GoKit 原理图
- Keil Microcontroller Development Kit Version 4.72
- 4位串行595数码管资料.zip
- SEGGER J-Link 一条,接口 20PIN JTag
- GoKit MCU 源码
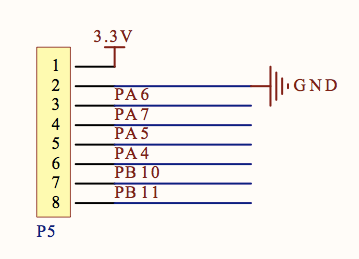
根据《GoKit 原理图》,GoKit 板上的 P5 扩展接口是提供给 MCU 的 IO 引脚,包括 PA4-PA7、PB10 和 PB11 共6个引脚,如图所示:
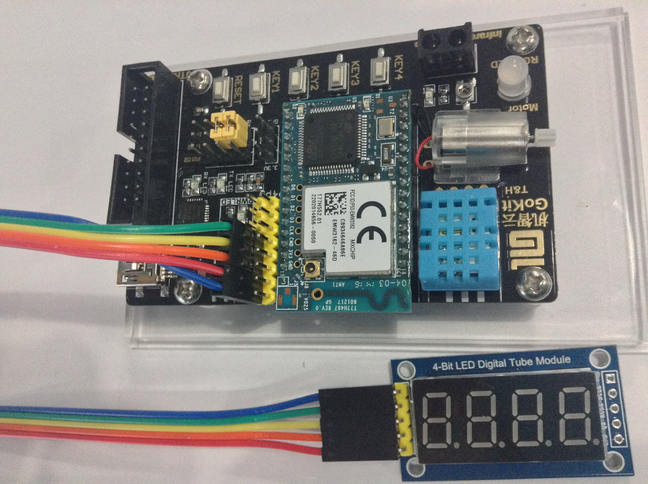
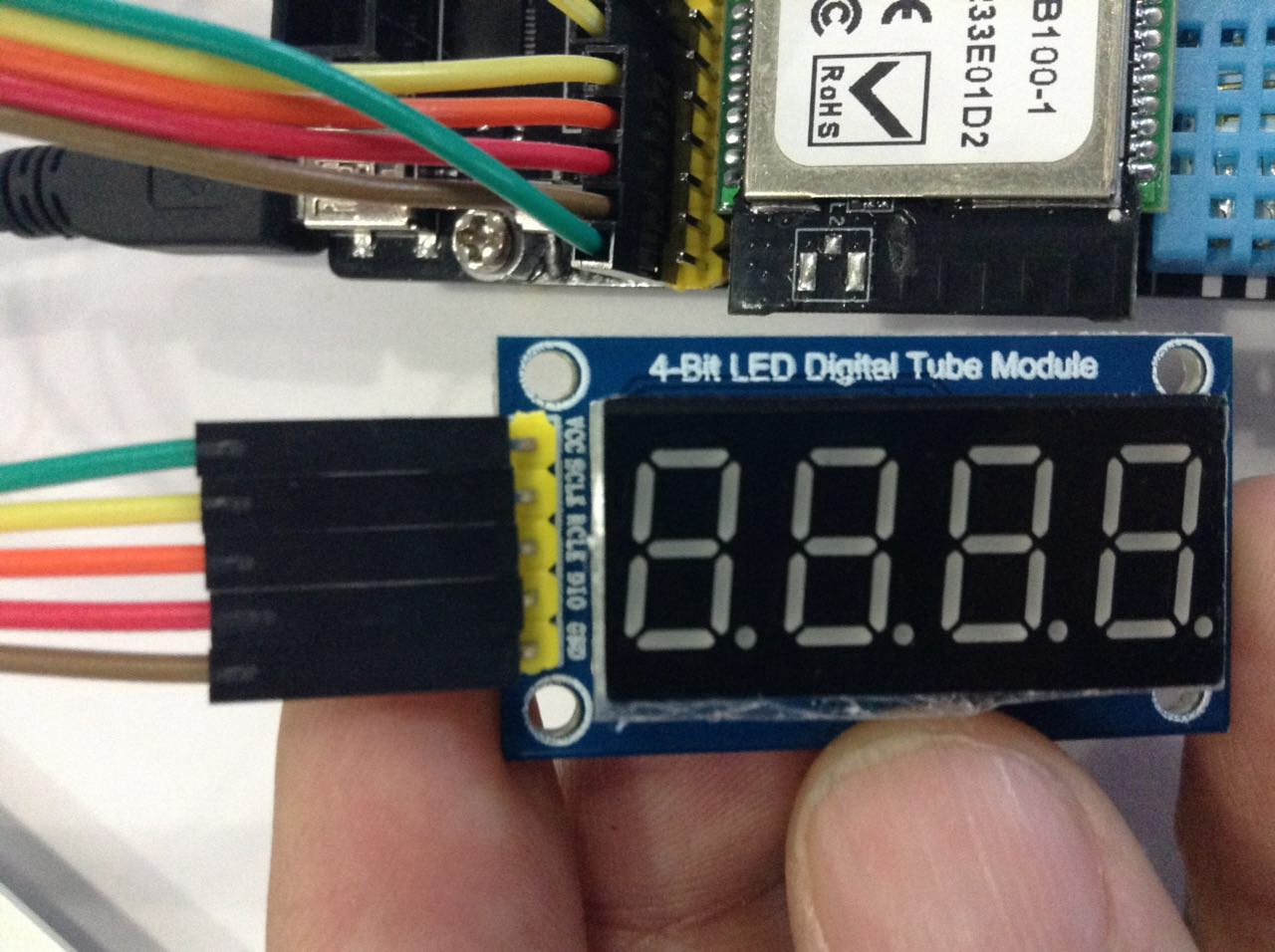
先将4位数码管的 DIO、RCLK、SCLK 分别连接到 PA6、PA7、PA5 口并连接 VCC 和 GND,如下图:
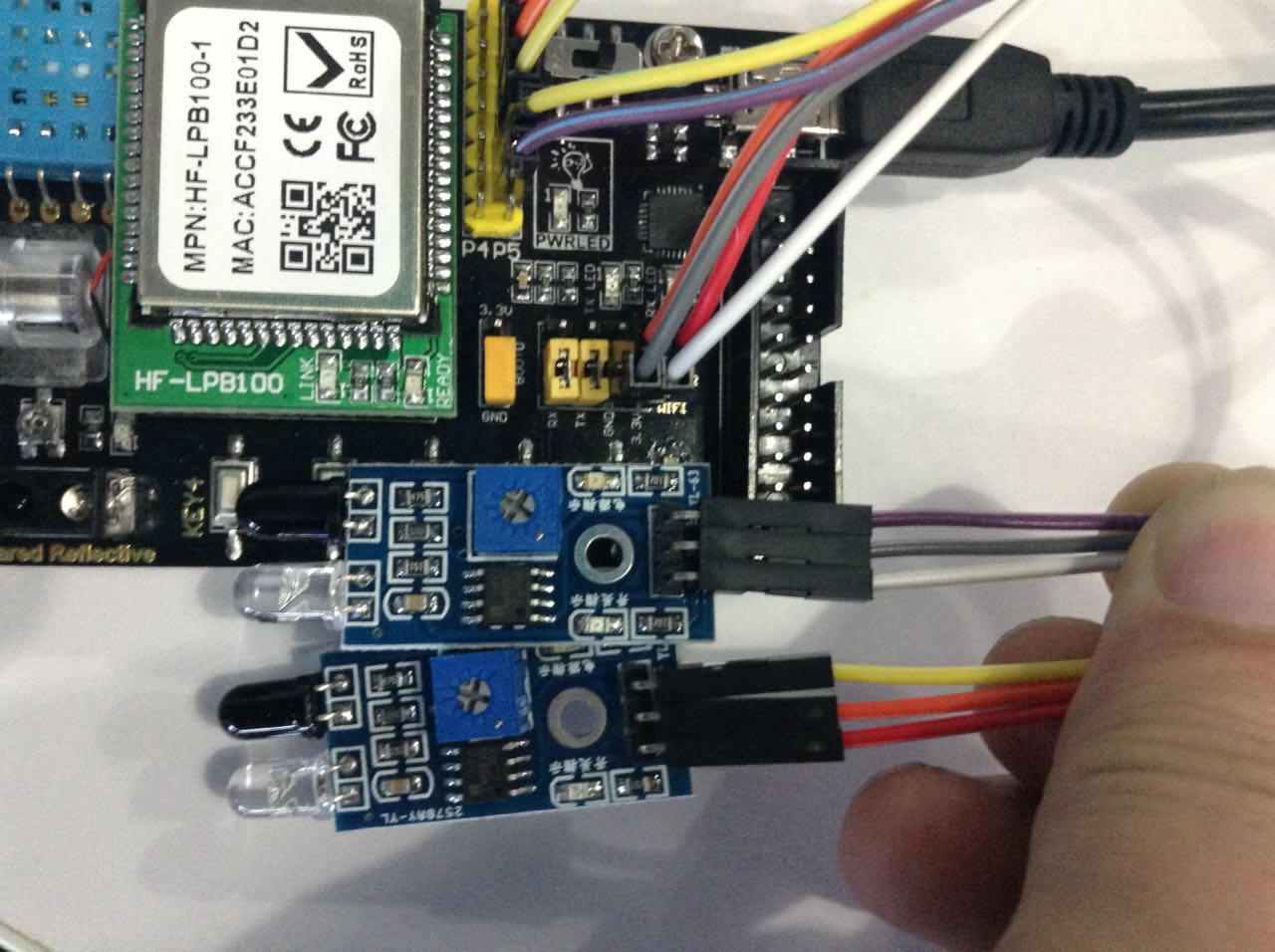
然后按照如下电脑连接 ST188 在面包板上:
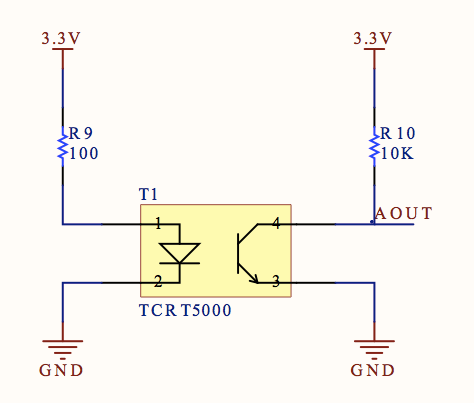
并和 GoKit 相连,红蓝红外探测器的 AOUT 分别连接 P5 扩展接口中的 PA4 和 PB10 引脚:
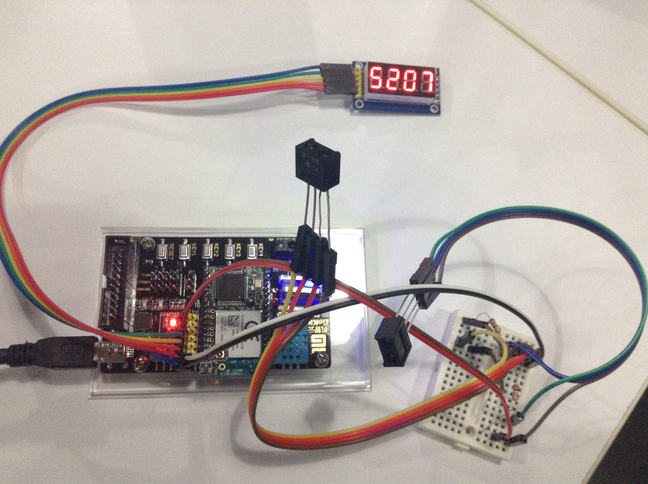
最后将 JLink 连接到 GoKit 的 20PIN 插槽上即可。
首先克隆 GoKit 的 MCU 代码到本地 smartfoosball-mcu 目录:
git clone https://github.com/gizwits/gokit-mcu smartfoosball-mcu
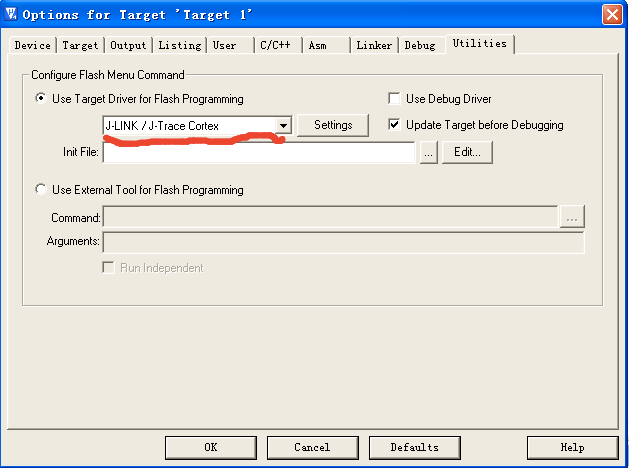
使用 MDK 打开子目录 MDK_Project 下的 Project 项目,配置 "Target 1" 的 Debug 和 Utilities 选项中的设备连接方式为 “J-LINK / J-Trace Cortex”。
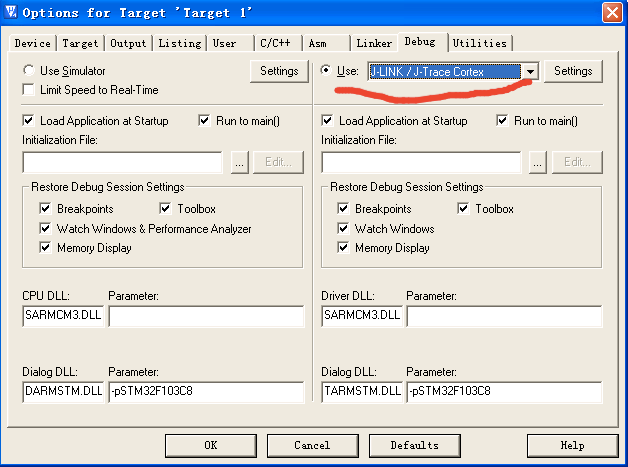
使用 JLink 连接设备的时候如果提示需要驱动的话可以到 “C:\Keil\ARM\Segger” 目录下寻找对应的 JLink 驱动程序。
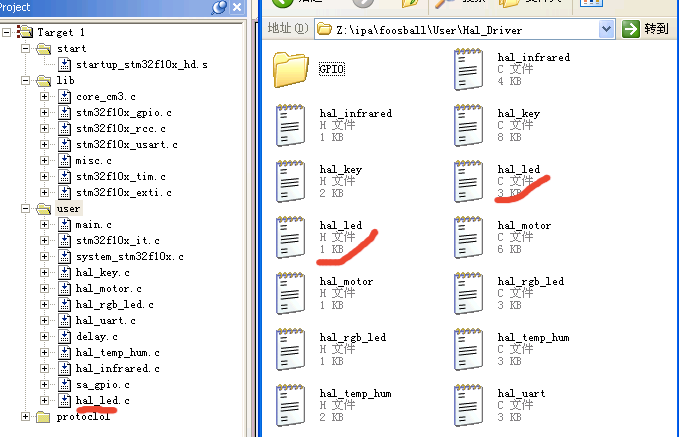
在项目子目录 User\Hal_Driver 中增加 hal_led.h 和 hal_led.c 文件,并增加到项目的 user 分组下面
参照“4位串行595数码管资料”和 GoKit 源码中的 hal_rgb_led 模块,定义 hal_led.h 如下:
#ifndef _HAL_LED4_H
#define _HAL_LED4_H
#include <stdio.h>
#include <stm32f10x.h>
#include "protocol.h"
#define DIO_LOW GPIO_ResetBits(GPIOA,GPIO_Pin_6) // 通过 PA6 发送低电平 给 DIO
#define DIO_HIGH GPIO_SetBits(GPIOA,GPIO_Pin_6) // 通过 PA6 发送高电平 给 DIO
#define RCLK_LOW GPIO_ResetBits(GPIOA,GPIO_Pin_7) // 通过 PA7 发送低电平 给 RCLK
#define RCLK_HIGH GPIO_SetBits(GPIOA,GPIO_Pin_7) // 通过 PA7 发送高电平 给 RCLK
#define SCLK_LOW GPIO_ResetBits(GPIOA,GPIO_Pin_5) // 通过 PA5 发送低电平 给 SCLK
#define SCLK_HIGH GPIO_SetBits(GPIOA,GPIO_Pin_5) // 通过 PA5 发送高电平 给 RCLK
void LED4_Init(void); // 初始化 IO 口信息
// 输出 4 个 数字到 LED 显示屏,取值范围 从 0 到 15(F)
void LED4_Display(uint8_t d1, uint8_t d2, uint8_t d3, uint8_t d4);
#endif /*_HAL_LED4_H*/
并实现如下:
#include "hal_led.h"
//-----------------------------------------------------------------------------
// 函数原形定义
#define uchar unsigned char
void LED_OUT(uchar X); // LED单字节串行移位函数
unsigned char LED_0F[]; // LED字模表
void LED_OUT(uchar X)
{
uchar i;
for(i=8;i>=1;i--)
{
if (X&0x80) DIO_HIGH; else DIO_LOW;
X<<=1;
SCLK_LOW;
SCLK_HIGH;
}
}
unsigned char LED_0F[] =
{// 0 1 2 3 4 5 6 7 8 9 A b C d E F -
0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x8C,0xBF,0xC6,0xA1,0x86,0xFF,0xbf
};
void LED4_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_5;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void LED4_Display(uint8_t d1, uint8_t d2, uint8_t d3, uint8_t d4)
{
unsigned char *led_table; // 查表指针
uchar i;
//显示第1位
led_table = LED_0F + d1;
i = *led_table;
LED_OUT(i);
LED_OUT(0x01);
RCLK_LOW;
RCLK_HIGH;
//显示第2位
led_table = LED_0F + d2;
i = *led_table;
LED_OUT(i);
LED_OUT(0x02);
RCLK_LOW;
RCLK_HIGH;
//显示第3位
led_table = LED_0F + d3;
i = *led_table;
LED_OUT(i);
LED_OUT(0x04);
RCLK_LOW;
RCLK_HIGH;
//显示第4位
led_table = LED_0F + d4;
i = *led_table;
LED_OUT(i);
LED_OUT(0x08);
RCLK_LOW;
RCLK_HIGH;
}
GoKit 的红外探测模块 hal_infrared 只支持板上内置的一个红外探测器,而我们新增了两个,为了重用之前的红外探测模块代码,做了如下改动:
#ifndef _HAL_INFRARED_H
#define _HAL_INFRARED_H
#include <stdio.h>
#include <stm32f10x.h>
#include "delay.h"
#include "hal_uart.h"
#define IR_BOARD 0 // 增加了三个的红外设备标识,此为 GoKit 内置在板上的
#define IR_BLUE 1 // 这个是蓝方的进球探测器
#define IR_RED 2 // 这个是红方的进球探测器
// 以下函数全部增加了 id 参数,取值范围如上, IR_BOARD | IR_BLUE | IR_RED
void IR_EXTI_Init(uint8_t id);
void IR_TIM_Init(uint8_t id);
void IR_TIM_Init(uint8_t id);
void IR_Init(uint8_t id);
void IR_Handle(uint8_t id);
void IR_GPIO_Init(uint8_t id);
#endif /*_HAL_INFRARED_H*/
在 hal_infrared.c 中,我们也针对不同的设备设置了不同的 IO 口和中断回调函数。 由于本人对回调不是很熟悉,暂时只能同时处理两路回调,IR_BOARD 和 IR_BLUE 使用了同一中断 EXTI15_10_IRQn,所以这两者只能起用一个。
回调函数在 user/stm32f10x_it.c 中定义:
void EXTI15_10_IRQHandler(void)
{
EXTI->EMR &= (uint32_t)~(1<<1); //屏蔽中断事件
while(EXTI_GetITStatus(EXTI_Line10)!= RESET )
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10))
{
if ((l_timestamp - last_timestamp) > 50) { // 增加延时处理,避免重复计分
handleGoal(SIDE_BLUE); // 蓝方进球
last_timestamp = l_timestamp;
}
}
else
{
last_timestamp = l_timestamp;
}
EXTI_ClearITPendingBit(EXTI_Line10);
}
EXTI->EMR |= (uint32_t)(1<<1); //开启中断事件
}
void EXTI4_IRQHandler(void)
{
EXTI->EMR &= (uint32_t)~(1<<1); //屏蔽中断事件
while(EXTI_GetITStatus(EXTI_Line4)!= RESET )
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_4))
{
if ((l_timestamp - last_timestamp) > 50) {
handleGoal(SIDE_RED); // 红方进球
last_timestamp = l_timestamp;
}
}
else
{
last_timestamp = l_timestamp;
}
EXTI_ClearITPendingBit(EXTI_Line4);
}
EXTI->EMR |= (uint32_t)(1<<1); //开启中断事件
}
在 main.c 主函数 main 中,引入相关头文件,并增加初始化如下:
Motor_Init();
RGB_LED_Init();
DHT11_Init();
//IR_Init(IR_BOARD); // 关闭主板红外模块
LED4_Init(); // 初始化数码管模块
//LED4_Display(0, 1, 2, 3);
McuStatusInit();
IR_Init(IR_BLUE); // 初始化蓝方进球红外探测器
IR_Init(IR_RED); // 初始化红方进球红外探测器
根据下载的“机智云接入串口通信协议文档”,数据上报和下发控制的数据包协议分别如下:
| 字节序 | 位序 | 数据内容 | 说明 |
|---|---|---|---|
| byte0 | bit7 bit6 ... bit1 bit0 | 0b00000011 | 游戏控制,值为3:字段bit2 ~ bit0,字段值为0b11; |
| byte1 | 0xFE | 场次字段值为254; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为254 | |
| byte2 | bit7 bit6 ... bit1 bit0 | 0b10100101 | 双方交换场地,值为true:字段bit0,字段值为0b1; 进球,值为2:字段bit2 ~ bit1,字段值为0b10; 进球队员,值为4:字段bit5 ~ bit3,字段值为0b100; 交换球员位置,值为2:字段bit7 ~ bit6,字段值为0b10; |
| byte3 | 0x0A | 蓝方进球数字段值为10; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为10 | |
| byte4 | 0x0A | 红方进球数字段值为10; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为10 | |
| byte5 | 0x05 | 蓝方赢局数字段值为5; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为5 | |
| byte6 | 0x05 | 红方赢局数字段值为5; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为5 |
| 字节序 | 位序 | 数据内容 | 说明 |
|---|---|---|---|
| byte0 | bit7 bit6 ... bit1 bit0 | 0b00000011 | 游戏控制,值为6:字段bit2 ~ bit0,字段值为0b11; |
| byte1 | 0xFE | 场次字段值为254; 实际值计算公式y=1.000000*x+(0.000000) x最小值为0,最大值为254 |
每个产品都有自己的标识,如果你定义了自己的产品,则需要修改产品标识,修改 protocol.h 中宏定义 PRODUCT_KEY 的值为机智云网站“产品信息”页面中的标识码字符串内容即可
#define PRODUCT_KEY "ef992d473159465ba9d70d4d1a14aa39"
GoKit 源码中分别针对以上上报和下发的数据结构定义了 _status_readonly 和 _status_writable 结构体,下发控制时 _status_writable 会收到下发的数据,而上报的数据则是 _status_writable 加上_status_readonly。
根据协议,在 protocol.h 中修改 _status_writable 和 _status_readonly 如下:
__packed struct _status_writable
{
uint8_t game_control; // bit 0=going,1=start,2=cancel_red_goal,3=cancel_blue_goal
uint8_t game_id;
};
__packed struct _status_readonly
{
uint8_t actions; // exchange position=0, goal=1-2, goal_member=3-5, exchange_member=6-7
uint8_t blue_goals;
uint8_t red_goals;
uint8_t blue_score;
uint8_t red_score;
};
以上结构体在程序中对应的变量名分别为 m_w2m_controlMcu.status_w 和 m_w2m_controlMcu.status_r
MCU 收到 Wi-Fi 的控制指令,编程入口在 protocol.c 的 CmdSendMcuP0 函数中,根据协议修改如下:
/*******************************************************************************
* Function Name : CmdSendMcuP0
* Description : mcu接收到wifi的控制命令,此部分是需要mcu开发者重点实现的
* Input : buf:串口接收缓冲区地址
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void CmdSendMcuP0(uint8_t *buf)
{
uint8_t tmp_cmd_buf;
if(buf == NULL) return ;
memcpy(&m_w2m_controlMcu, buf, sizeof(w2m_controlMcu));
//上报状态
if(m_w2m_controlMcu.sub_cmd == SUB_CMD_REQUIRE_STATUS) ReportStatus(REQUEST_STATUS);
//控制命令,操作字段顺序依次是: game_control, game_id
if(m_w2m_controlMcu.sub_cmd == SUB_CMD_CONTROL_MCU){
//先回复确认,表示收到合法的控制命令了
SendCommonCmd(CMD_SEND_MCU_P0_ACK, m_w2m_controlMcu.head_part.sn);
//控制命令标志按照协议表明哪个操作字段有效(对应的位为1)want to control game
if((m_w2m_controlMcu.cmd_tag & 0x01) == 0x01)
{
//0 ongoing, 1: start, 2: cancel_red_goal, 3: cancel_blue_goal
uint8_t control = m_w2m_controlMcu.status_w.game_control & 0x07;
if(control == 0x01) // start
{
//控制 game id
if((m_w2m_controlMcu.cmd_tag & 0x02) == 0x02)
{
resetGame(m_w2m_controlMcu.status_w.game_id);
} else {
resetGame(m_m2w_mcuStatus.status_w.game_id + 1);
}
} if (control == CANCEL_RED_GOAL || control == CANCEL_BLUE_GOAL) {
cancelBall(control);
}
m_m2w_mcuStatus.status_w.game_control = GAME_STATUS_GOING;
}
ReportStatus(REPORT_STATUS);
}
}
MCU 通常会在以下情况调用 ReportStatus(tag)上报设备状态:
- 收到状态查询指令或者控制指令,如上 CmdSendMcuP0 中会调用
- CheckStatus(void) 方法发现设备状态变化时上报
- CheckStatus(void) 方法固定周期定时上报
主要实现在 ReportStatus(tag) 方法中,需要注意的是如果你的数值长度是 16 位或以上,在上报时需要调用 exchangeBytes(value) 方法转换为大端序
桌上足球的业务逻辑实现入口主要有:
- protocol.c 的下发控制入口 CmdSendMcuP0
- stm32f10x_it.c 红外探测器终端回调 EXTI15_10_IRQHandler 和 EXTI4_IRQHandler
- hal_key.c 的 KeyHandle(void) 长短按键回调
- protocol.c 的 CheckStatus(void) 中,更新数码管显示
相关代码请参见以上入口,按键相关功能如下:
- 短按 KEY1, KEY2, KEY3, KEY4,表示标记进球队员, 依次是红方前锋,红方后卫,蓝方前锋,蓝方后卫
- 长按 KEY3,双方交换场地,比分清零重新开下一局
- 长按 KEY4, 比分清零,重新开局。
- 当计分板上有分数时
- 长按 KEY1 表示取消红方进球
- 长按 KEY2 表示取消蓝方进球
- 手机控制
- 游戏控制设置为开始,比分清零,重新开局
- 设置为取消红方进球,则取消红方进球数一个
- 设置为取消蓝方进球,同理取消蓝方进球数一个,如果进球数为零则不做任何改动
- 通过修改 game_id 可以修改游戏场次
到机智云网站产品开发资源中即可下载 iOS 或 Android 的 Demo App 进行联调

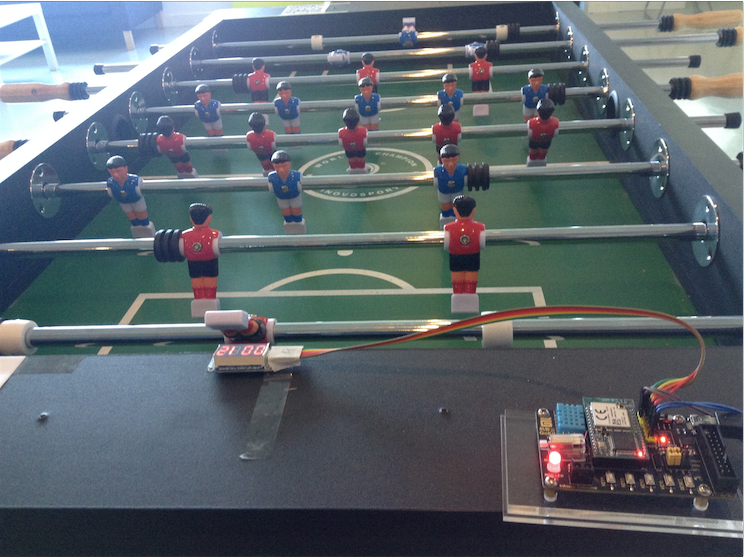
结果示意图
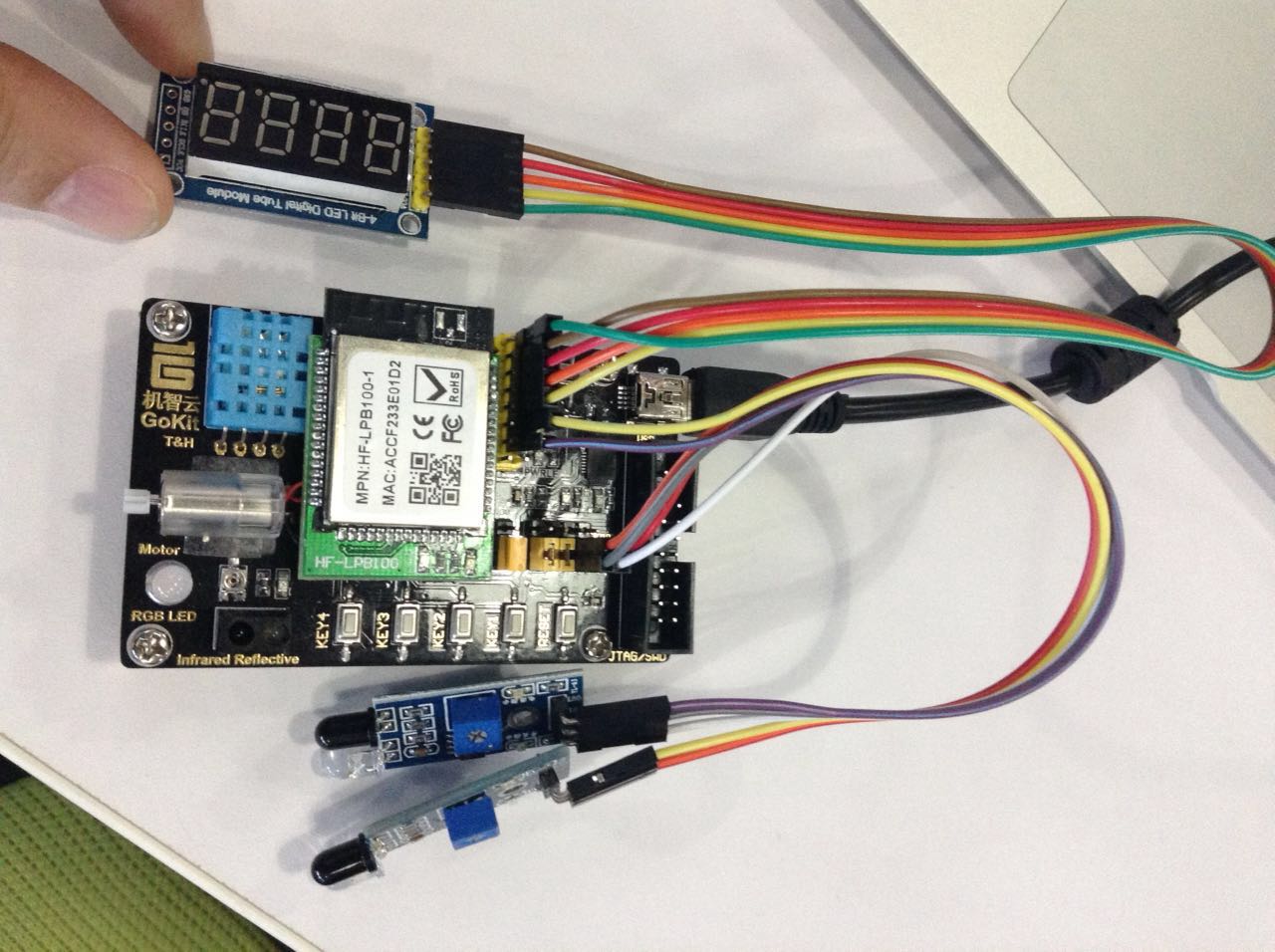
模块安装图
传感器组合模块安装图
LED 安装图
- 4位数码管 http://item.taobao.com/item.htm?spm=a1z10.3.w4002-5310596272.76.DIQJh4&id=14983231339
- 红外传感器 http://item.taobao.com/item.htm?spm=a210c.1.3.16.DCbazv&id=15785730673
- 60CM杜邦线 http://item.taobao.com/item.htm?spm=a1z10.5.w4002-5310597126.54.rAFxu2&id=9939653490
- 31CM杜邦线 http://item.taobao.com/item.htm?spm=a1z10.5.w4002-5310597126.48.rAFxu2&id=3042294262
- 40P 杜邦公头转母头 http://item.taobao.com/item.htm?spm=a210c.1.3.4.DCbazv&id=12586536686