OpenWineBottle task doesn't initialize correctly after the first demo #27
Comments
stepjam
added a commit
that referenced
this issue
Jan 12, 2020
quebulm
pushed a commit
to quebulm/RLBench
that referenced
this issue
Jan 29, 2024
* -1 instead of None for making object orphan * init mobile robot support * youBot arm added * added some lua functions for mobile motion planning * added child script to mobile scenes to allow appropriate suffix when multiple instance * base_ref needs to be parent of the robot tree when computing path for collision check * added dubins params for smoother trajectories * updated dummy scene * description example changed * changed args order init * runtimerror when path completed, corrected height target * controller two_wheels distance dependancy added, corrected height target, description info * lowered threshold omni robot * remove output function * Changes to make tests pass. * Refactor of mobile platforms. * Update to youbot model file. * Added packages to setup script. * Gn3112 mobile base (stepjam#24) * added algorithm option to mobile base * added path checking for get_linear mobile base * added comments * docstring corrections * added algorithm arg, correction docstrings * deleted comment * moved waypoint causing test to fail * Fixed bugs in mobiles. Added PID for nonholonomic. Added LoCoBot. * Renaming examples. Joints no longer call get/set config tree. * Model modifications.
markusgrotz
pushed a commit
to markusgrotz/RLBench
that referenced
this issue
Jul 12, 2024
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
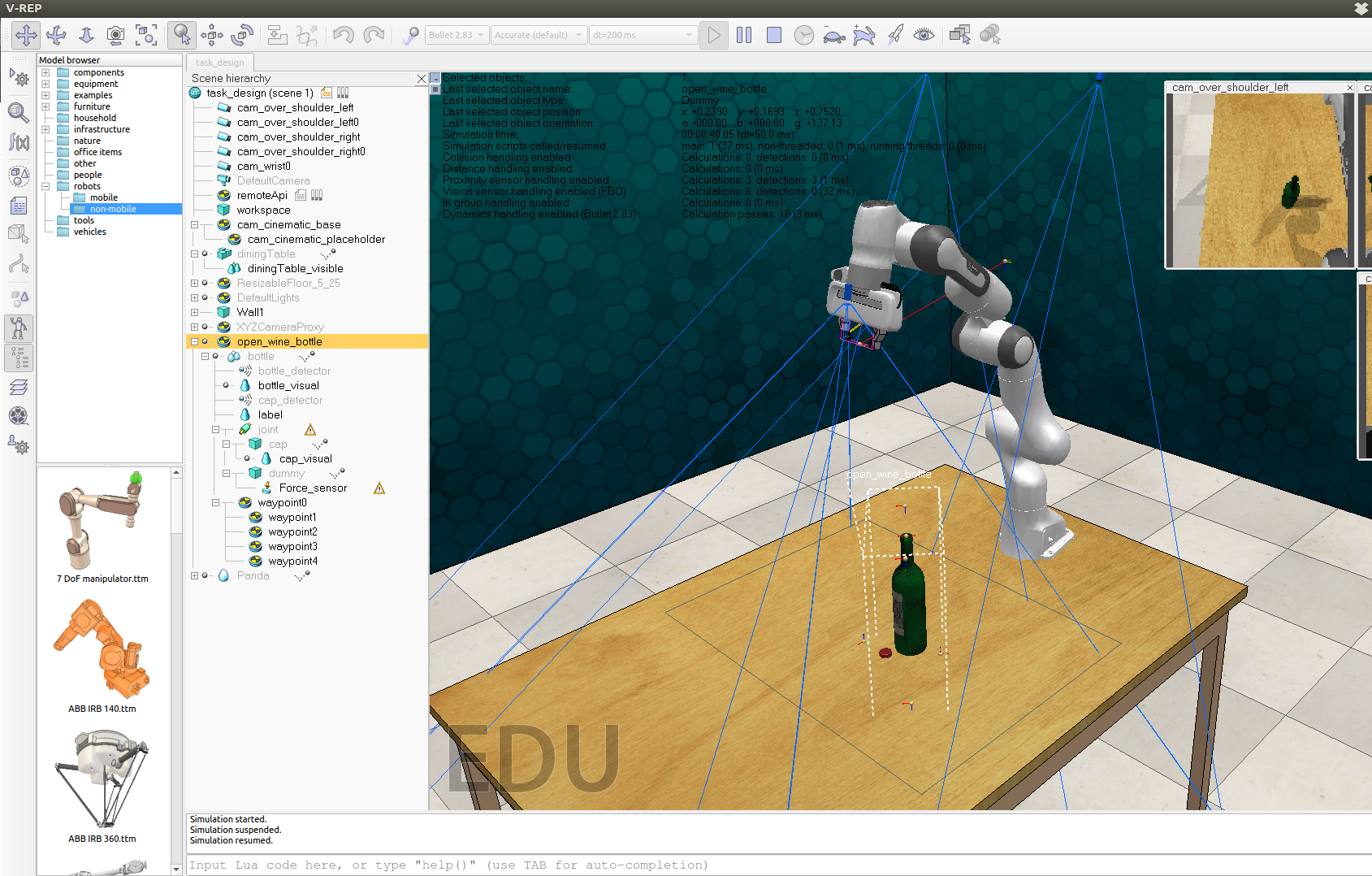
I was collecting multiple demos for the OpenWineBottle task and noticed that it works fine on the first demo collected (cap is on bottle and robot removes cap from bottle), but on subsequent attempts the bottle is initialized with the cap on the table instead of the bottle, and the robot tries to plan its motion to the top of the bottle and then the environment just resets and puts the bottle in a different location. I've attached an image of the environment with the cap on the table, which is how it keeps being initialized after the first recorded demo.
The text was updated successfully, but these errors were encountered: