These are some simple analysis examples over an open time series dataset from the strawlab. They support our EuroScipy 2015 talk Reverse Engineering Animal Vision with Virtual Reality:

We recommend installing using the provided conda environment:
# Clone the repository
git clone https://github.com/strawlab/strawlab-examples.git
# Create the conda environment
cd strawlab-examples
conda create -n strawlab -f environment.yaml
# Activate the environment
source activate strawlab
# Run an example analysis script
python strawlab_examples/euroscipy/euroscipy_example.pyThe last step runs strawlab_examples/euroscipy/euroscipy_example.py. This simple script will download a sample dataset of trials. A trial is a collection of time series keeping track of stimuli and measuring response for a single fly flight with rich metadata (e.g. genotype, type of stimulus, time...) attached. It will then proceed to perform some analysis leveraging, among others, whatami and jagged. In particular, the script will:
- store data and results in ~/np-degradation
- download the dataset if needed (1.7GB)
- generate a jagged store for fast retrieval of single trial time series
- generate a features table with several response only and stimulus-response features per trial
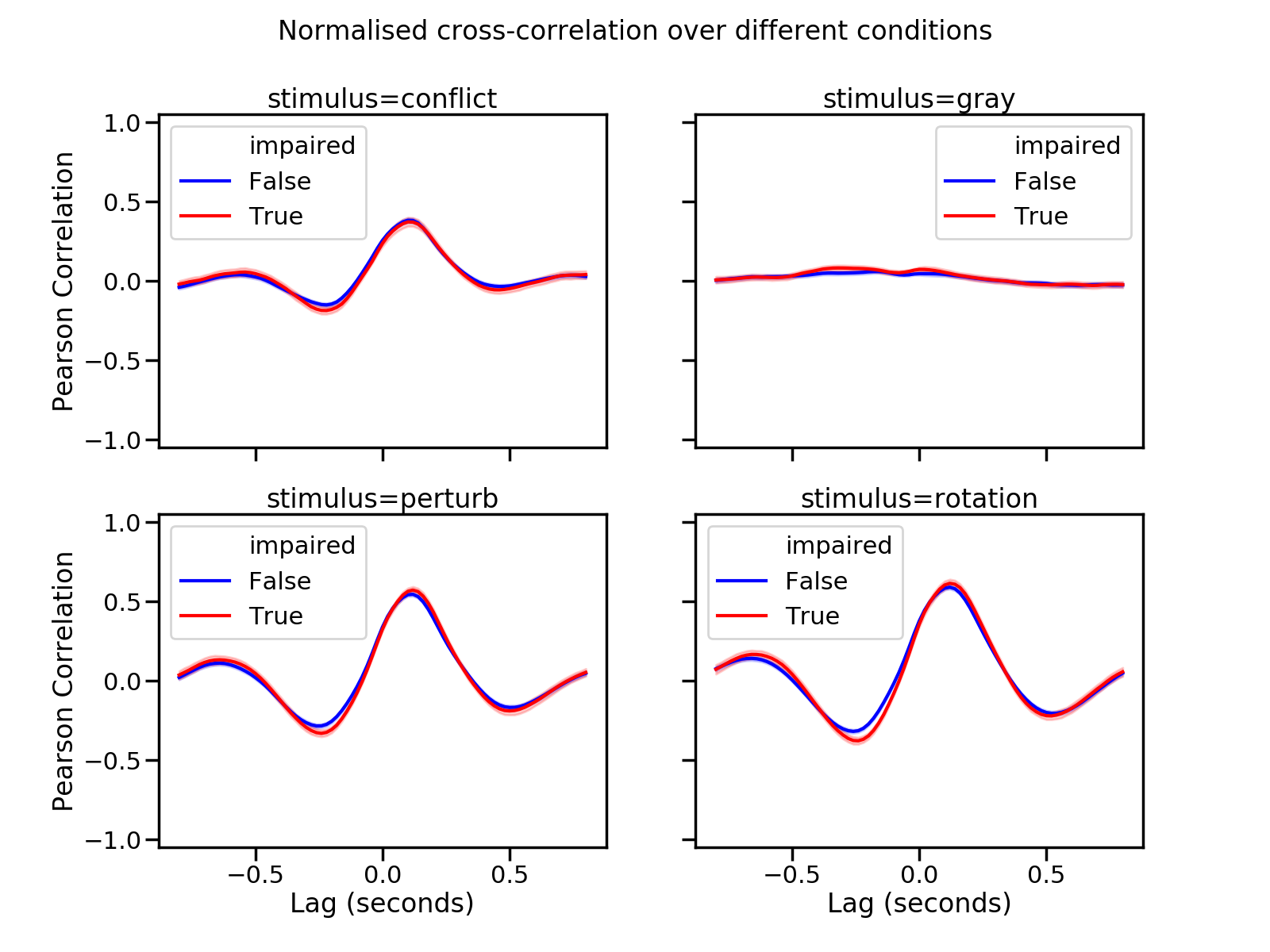
- melt the features dataframe for easy analysis of stimulus-response correlation at several lags
If all goes well, the following plot will be generated:
Note that for running the full benchmarks you would need datasets that are unreleased yet. Use the public neuropeptide degradation dataset to get a feeling on how these work:
Note: the benchmark code has moved to the jagged_ repository.