I create this project after watching Siraj's video about how to simulate a self-driving car. Instead using Keras to build a model, I want to using Pytorch for the model and training.
The repo is inspired by naokishibuya. I adapt his augmentation methods.

- I think the most challenge is generating enough data for your model. For some tricky curves on the road, you need to creat more data.
- Building a model in Pytorch is not as straighforward as in Keras. You need to understand the framework and how it processes data first.
- Need to create a Dataloader for your own data.
- Re-use as much code as possible.
- Created the Dataloader for car dataset
- Created the CarModel for training with the dataset. The model is based on The NVIDIA model.
- Created another Simple Car Model by reducing the number of Convolutional and Linear layers.
- Modified drive.py so that it can load the Pytorch model.
- After training Simple Model around 15 epochs, the model can drive a car for one full lap without any crashing.
- I save two model, the first model is saved when the validation loss is lowest, the second model is saved after training phase stop. As I notice, the second model is quite smoother than the first one.
- Working models are put inside
working_modelsdir
(module): CarSimpleModel (
(conv_layers): Sequential (
(0): Conv2d(3, 24, kernel_size=(3, 3), stride=(2, 2), bias=False)
(1): ELU (alpha=1.0)
(2): Conv2d(24, 48, kernel_size=(3, 3), stride=(2, 2), bias=False)
(3): MaxPool2d (size=(4, 4), stride=(4, 4), dilation=(1, 1))
(4): Dropout (p = 0.25)
)
(linear_layers): Sequential (
(0): Linear (3648 -> 50)
(1): ELU (alpha=1.0)
(2): Linear (50 -> 10)
(3): Linear (10 -> 1)
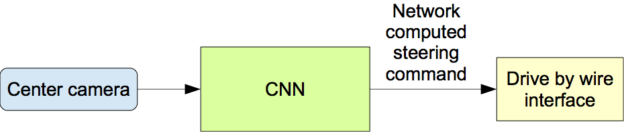
)- Training the neural network

- After trained, the network is able to generate steering commands from the video images of a single center camera.
{kind=link}
- Testing the model with the Simulator
- You can install all dependencies by running conda:
conda env create -f environments.yml- Note: I've removed tensorflow in this file
- After that, you need to install Pytorch
- To run up the server, you need to download Udacity Self-Driving Car Simulator. (using Autonomous Mode when trying your model)