{kind=link}
{kind=link}
dumpvdl2 is a VDL Mode 2 message decoder and protocol analyzer.
Current stable version: 2.3.0 (released August 22, 2023)
- Runs under Linux (tested on: x86, x86-64, ARM) and MacOS (not tested very well, feedback welcome)
- Supports following SDR hardware:
- RTLSDR (via rtl-sdr library)
- Mirics SDR (via libmirisdr-4)
- SDRPlay RSP (native support through official driver version 2 and 3)
- SoapySDR (via soapy-sdr project)
- prerecorded IQ data from a file
- Decodes multiple VDL2 channels simultaneously
- Automatically reassembles multiblock ACARS messages, MIAM file transfers, fragmented X.25, CLNP and COTP packets.
- Supports various outputs and output formats (see below)
- Enriches logged messages with ground station details read from a text file (MultiPSK format)
- Enriches logged messages with aircraft data read from Basestation SQLite database
- Supports message filtering by type or direction (uplink, downlink)
- Can store raw frames in a binary file for later decoding or archiving purposes.
- Produces decoding statistics using Etsy StatsD protocol
- Human readable text
- JSON
- Single-line ACARS format accepted by Planeplotter
- Custom binary format (suitable for storing raw frames)
- file (with optional daily or hourly file rotation)
- reliable network messaging via ZeroMQ
- UDP socket

- Aviation Link Control (AVLC)
- ACARS over AVLC
- ISO 8208 / X.25 DTE-DCE Interface
- ISO 8473 / X.233 Connectionless Network Protocol (CLNP)
- ISO 8073 / X.224 Connection Oriented Transport Protocol (COTP)
- ISO 8327 / X.225 Session Protocol
- ISO 8650 / X.227 Association Control Service Element (ACSE)
- ISO 9542 End System to Intermediate System (ES-IS)
- ISO 10747 Inter-Domain Routing Protocol (IDRP)
- ATN-B1 Context Management
- ATN-B1 Controller-Pilot Data Link Communications, version 1 (CPDLC)
- ATN-B2 Automatic Dependent Surveillance - Contract, version 2 (ADS-C)
- All applications and protocols handled by libacars library (full list here)
Mandatory dependencies:
- gcc
- make
- cmake
- pkg-config
- git (unless you intend to use only packaged releases of dumpvdl2 and all dependencies)
- glib2
- libacars 2.1.0 or later
Optional dependencies:
- SDR device drivers:
- librtlsdr
- libmirisdr-4
- SDRPlay binary driver
- SoapySDR
- Dependencies for optional features:
- sqlite3 (for enriching messages with aircraft data read from SQB database)
- statsd-c-client (for Etsy StatsD statistics)
- libprotobuf-c 1.3.0 or later (for binary format support)
- libzmq 3.2.0 or later (for ZeroMQ networked output)
Install necessary dependencies (unless you have them already). Example for Debian / Raspbian:
sudo apt install build-essential cmake git libglib2.0-dev pkg-config
Install libacars library - either:
- download a stable release package from here
- or clone the source repository with:
cd
git clone https://github.com/szpajder/libacars
cd libacars
Compile and install the library:
mkdir build
cd build
cmake ../
make
sudo make install
sudo ldconfig
To use RTL dongles, install librtlsdr library (unless you have it already).
Raspbian has a packaged version:
apt install librtlsdr-dev
If your distribution does not provide a package, then clone the source repository and compile manually:
apt install libtool autoconf libusb-1.0-0-dev
cd
git clone git://git.osmocom.org/rtl-sdr.git
cd rtl-sdr/
autoreconf -i
./configure
make
sudo make install
sudo ldconfig
sudo cp $HOME/rtl-sdr/rtl-sdr.rules /etc/udev/rules.d/rtl-sdr.rules
libmirisdr-4 is an open-source alternative to SDRPlay binary driver (Mirics is the chipset brand which SDRPlay RSPs are based on). However, as of December 2017, it works properly with RSP1 only. For other RSP types (RSP2, RSP/1A) gain control does not work too well, so the native closed source driver is a better option (see next section). libmirisdr-4 is a good choice for RSP1 and various Mirics-based DVB-T dongles which are detected as RSP1 device. An advantage over RSP binary API is lower CPU utilization in dumpvdl2 thanks to a lower sampling rate.
Install libmirisdr-4 library:
apt install libusb-1.0-0-dev
cd
git clone https://github.com/f4exb/libmirisdr-4.git
cd libmirisdr-4
./build.sh
cd build
sudo make install
sudo ldconfig
sudo cp $HOME/libmirisdr-4/mirisdr.rules /etc/udev/rules.d/mirisdr.rules
Download and install API/hardware driver package from here. Make sure you have selected the right hardware platform before downloading, otherwise the installer will fail. dumpvdl2 supports both version 2 and 3 of the driver. Version 3 is needed for newer devices (like RSPdx). Older hardware works with both versions. You can have both versions installed simultaneously and choose either one when running the program.
Download and install the SoapySDR library from here. Then install the driver module for your device. Refer to SoapySDR wiki for a list of all supported modules.
Note: The device must support a sampling rate of 2100000 samples per second to work correctly with dumpvdl2. It is therefore not possible to use devices which only support predefined, fixed sampling rates (notably Airspies). This limitation will be removed in a future release of dumpvdl2.
VDL2 message addressing is based on ICAO 24-bit hex codes (same as ADS-B). dumpvdl2 may use your basestation.sqb database to enrich logged messages with aircraft data (registration number, operator, type, etc). If you want this feature, install SQLite3 library:
sudo apt install libsqlite3-dev
sudo ldconfig
Install statsd-c-client library from https://github.com/romanbsd/statsd-c-client:
cd
git clone https://github.com/romanbsd/statsd-c-client.git
cd statsd-c-client
make
sudo make install
sudo ldconfig
dumpvdl2 can write raw AVLC frames into a binary file. Each frame is stored together with its metadata (ie. timestamp of reception, channel frequency, signal level, noise level, etc). Frames stored in such a file can be later read back and decoded as if they were just received from the air. To enable this feature, install protobuf-c library. On Debian/Rasbian Buster just do this:
sudo apt install libprotobuf-c-dev
It won't work on Debian/Raspbian versions older than Buster, since protobuf-c library shipped with these is too old.
ZeroMQ is a library that allows reliable messaging between applications to be set up easily. dumpvdl2 can publish decoded messages on a ZeroMQ socket and other apps can receive them over the network using reliable transport (TCP). To enable this feature, install libzmq library:
sudo apt install libzmq3-dev
It won't work on Debian/Raspbian versions older than Buster, since libzmq library shipped with these is too old.
- Download a stable release package from here and unpack it...
- ...or clone the repository:
cd
git clone https://github.com/szpajder/dumpvdl2.git
cd dumpvdl2
Configure the build:
mkdir build
cd build
cmake ../
cmake attempts to find all required libraries and SDR drivers. If a mandatory
dependency is not installed, it will throw out an error. Missing optional
dependencies cause relevant features to be disabled. At the end of the process
cmake displays a short configuration summary, like this:
-- dumpvdl2 configuration summary:
-- - SDR drivers:
-- - librtsdr: requested: ON, enabled: TRUE
-- - mirisdr: requested: ON, enabled: TRUE
-- - sdrplay v2: requested: ON, enabled: TRUE
-- - sdrplay v3: requested: ON, enabled: TRUE
-- - soapysdr: requested: ON, enabled: TRUE
-- - Other options:
-- - Etsy StatsD: requested: ON, enabled: TRUE
-- - SQLite: requested: ON, enabled: TRUE
-- - ZeroMQ: requested: ON, enabled: TRUE
-- - Raw frame output: requested: ON, enabled: TRUE
-- Configuring done
Here you can verify whether all the optional components that you need were properly detected and enabled. Then compile and install the program:
make
sudo make install
The last command installs the binary named dumpvdl2 to the default bin
directory (on Linux it's /usr/local/bin). To display a list of available
command line options, run:
/usr/local/bin/dumpvdl2 --help
or just dumpvdl2 --help if /usr/local/bin is in your PATH.
Build options can be configured with -D option to cmake, for example:
cmake -DRTLSDR=FALSE ../
causes RTLSDR support in dumpvdl2 to be disabled. It will not be compiled in, even if librtlsdr library is installed.
Disabling optional features:
-DRTLSDR=FALSE-DMIRISDR=FALSE-DSDRPLAY=FALSE-DSOAPYSDR=FALSE-DSQLITE=FALSE-DETSY_STATSD=FALSE-DRAW_BINARY_FORMAT=FALSE-DZMQ=FALSE
Setting build type:
-DCMAKE_BUILD_TYPE=Debug- builds the program without optimizations and enables--debugcommand line option which enables debug messages (useful for troubleshooting, not recommended for general use)-DCMAKE_BUILD_TYPE=Release- debugging output disabled (the default)
Note: Always recompile the program with make command after changing build
options.
Note: cmake stores build option values in its cache. Subsequent runs of
cmake will cause values set during previous runs to be preserved, unless they
are explicitly overriden with -D option. So if you disable a feature with, eg.
-DRTLSDR=FALSE and you want to re-enable it later, you have to explicitly use
-DRTLSDR=TRUE option. Just omitting -DRTLSDR=FALSE will not revert the
option value to the default.
As described in the "Dependencies" section, optional features (like SQLite support, binary format support, etc) are enabled automatically whenever libraries they depend upon are found during cmake run. Results of library searches are also stored in cmake's cache. If the program has initially been built without a particular feature and you later change your mind and decide to enable it, you need to:
- install the library required by the feature
- remove cmake's cache file to force all checks to be done again:
cd build
rm CMakeCache.txt
- rerun cmake and recompile the program as described in "Compiling dumpvdl2" section.
Simplest case on RTLSDR dongle - uses RTL device with index 0, sets the tuner gain to 40 dB and tuning correction to 42 ppm, listens to the default VDL2 frequency of 136.975 MHz, outputs to standard output:
./dumpvdl2 --rtlsdr 0 --gain 40 --correction 42
Device ID numbers are not persistent - they depend on the USB device order and the sequence which they were plugged in. You may specify the device by its serial number to get deterministic behavior:
./dumpvdl2 --rtlsdr 771111153 --gain 40 --correction 42
Use rtl_test utility to get serial numbers of your devices. dumpvdl2 prints
them to the screen on startup as well.
If you want to decode a different VDL2 channel than the default, just add its frequency as a last parameter:
./dumpvdl2 --rtlsdr 0 --gain 40 --correction 42 136725000
dumpvdl2 can decode multiple VDL2 channels simultaneously. Just list their frequencies at the end of the command line:
./dumpvdl2 --rtlsdr 0 --gain 40 --correction 42 136725000 136975000 136875000
If your receiver has a large center spike, you can set the center frequency a bit to the side of the desired channel frequency, like this:
./dumpvdl2 --rtlsdr 0 --gain 40 --correction 42 --centerfreq 137100000 <channel freqs here...>
Mirics is similar, however libmirisdr-4 library currently lacks support for
configuring correction in ppm. If your receiver needs a non-zero correction, you
can pass the appropriate value in Hertz, instead of ppm. Note: this value
will be subtracted from the center frequency, so if your receiver tunes a bit
too low, the parameter value shall be negative:
./dumpvdl2 --mirisdr 0 --gain 100 --correction -2500
Device serial number can be given instead of ID, the same way, as for RTLSDR receivers.
libmirisdr-4 supports two types of hardware: generic Mirics (0 - the default)
and SDRPlay (1). SDRPlay users should add --hw-type 1 option. It uses
frequency plans optimized for SDRPlay and reportedly gives better results than
the default mode.
If you get error messages about lost samples on Raspberry Pi, try adding
--usb-mode 1. This switches USB transfer mode from isochronous to bulk, which
is usually enough to rectify this problem. If it does not help, it might be that
your Pi is overloaded or not powerful enough for the task. Try reducing the
number of decoded VDL2 channels as a workaround.
In order to use SDRplay driver version 2, select the device with --sdrplay
option. The following devices are supported:
- RSP1
- RSP1A
- RSP2
- RSPduo
The following advanced configuration options are available:
- switching antenna ports (RSP2)
- bias-T (RSP2, RSP1A)
- notch filter for AM/FM broadcast bands (RSP2, RSP1A, RSPduo)
- tuner selection (RSPduo)
- Automatic Gain Control
Type ./dumpvdl2 --help to find out all the options and their default values.
SDRPlay driver has a concept of "gain reduction", which is an amount of gain (in
decibels) that shall be deducted from the maximum gain. As a result, --gain
option is not available with this driver - use --gr option to specify
requested end-to-end gain reduction instead. The smallest possible value is 20.
The highest value depends on receiver type, but it's not that important, because
in dumpvdl2 you will hardly be using a GR larger than 59 dB.
Another way to go is to skip the --gr option altogether. This will enable
Automatic Gain Control with a default set point of -30 dBFS, which shall
converge to a reasonable gain reduction value in a couple of seconds after the
program starts. AGC set point can be changed with --agc option, but treat this
as an "expert mode" knob, which is hardly ever needed.
Example 1: use SDRplay device ID=0, with auto gain and three VDL2 channels:
./dumpvdl2 --sdrplay 0 136975000 136875000 136775000
Example 2: use SDRplay device with serial number 35830222, set gain reduction to 40 dB, use antenna A port, disable Bias-T, enable AM/FM notch filter, set frequency correction to -1ppm:
./dumpvdl2 --sdrplay 35830222 --gr 40 --correction -1 --antenna A --biast 0 --notch-filter 1 136975000
In order to use SDRplay driver version 3, select the device with --sdrplay3
option. The following devices are supported:
- RSP1
- RSP1A
- RSP2
- RSPduo
- RSPdx
The following advanced configuration options are available:
- switching antenna ports (RSP2, RSPdx)
- bias-T (RSP2, RSP1A, RSPdx)
- notch filter for AM/FM broadcast bands (RSP2, RSP1A, RSPduo, RSPdx)
- notch filter for DAB band (RSP1A, RSPduo, RSPdx)
- tuner selection (RSPduo)
- Automatic Gain Control
Type ./dumpvdl2 --help to find out all the options and their default values.
When version 3 of the driver is used, dumpvdl2 allows controlling each gain
reduction component separately. --gr option is not available - there are two
options instead:
--ifgr <value_in_dB>- controls IF gain reduction (range: 20-59 dB)--lna-state <value>- sets the gain reduction of the LNA (ie. the input RF stage). The parameter is a non-negative integer from 0 (meaning: no gain reduction) up to N, where N depends on the receiver type. The higher the value, the higher the gain reduction (attenuation) in decibels. Refer to the "Gain Reduction Tables" section in the API documentation for a full list of LNA states and their respective gain reductions for each receiver.
if you want to set the gain reduction manually, specify both --ifgr and
--lna-state. If either option is omitted, the other one is ignored and
AGC is used instead.
Note: The device must support a sampling rate of 2100000 samples per second.
Tested with the following devices:
- SDRPLAY RSP2
- RTLSDR
Using SoapySDRServer it is possible to access a SDR device connected to another machine.
Features supported by dumpvdl2:
- switching antenna ports
- setting device-specific configuration parameters
- setting the gain globally or using individual gain components
- automatic gain control
Type ./dumpvdl2 --help to find out all the options and their default values.
Type SoapySDRUtil --find to find available devices.
Example 1: use SDRPLAY device with Antenna B, AGC and biasT activated:
./dumpvdl2 --soapysdr soapy=0,driver=sdrplay --soapy-antenna "Antenna B" --device-settings biasT_ctrl=true 136975000 136875000 136775000
Example 2: use RTLSDR device with AGC
./dumpvdl2 --soapysdr soapy=0,driver=rtlsdr 136975000 136875000 136775000
Example 3: use SDRPLAY device with separate gain reduction for RFGR for LNA and normal gain reduction IFGR
./dumpvdl2 --soapysdr soapy=0,driver=sdrplay --gain -1 --soapy-gain RFGR=0,IFGR=56 136975000 136875000 136775000
Example 4: Use a remote SDRPLAY with antenna B, Soapy server started with command line
SoapySDRServer --bind
Then you may run dumpvdl2 on any remote machine with:
./dumpvdl2 --soapysdr driver=remote,remote=tcp://<ip address>:55132,remote:driver=sdrplay,remote:format=CS16 \
--gain -100 --soapy-antenna "Antenna B" 136975000 136875000 136775000
By default dumpvdl2 formats decoded messages into human readable text and prints it to standard output. You can direct the output to a disk file instead:
./dumpvdl2 --output decoded:text:file:path=/some/dir/vdl2.log [other_options]
If you want the file to be automatically rotated on top of every hour, do the following:
./dumpvdl2 --output decoded:text:file:path=/some/dir/vdl2.log,rotate=hourly [other_options]
The file name will be appended with _YYYYMMDDHH suffix. If file extension is
present, it will be placed after the suffix.
If you prefer daily rotation, change rotate=hourly to rotate=daily. The file
name suffix will be _YYYYMMDD in this case. If file extension is present, it
will be placed after the suffix.
The --output option takes a single parameter consisting of four fields
separated by colons:
<what_to_output>:<output_format>:<output_type>:<output_parameters>
where:
-
<what_to_output>specifies what data should be sent to the output. Two values are supported:decoded- output decoded messagesraw- output AVLC frames without decoding (as raw bytes)
-
<output_format>specifies how the data should be formatted before sending it to the output. The following formats are currently supported:textjsonpp_acars- a single-line ACARS format accepted by Planeplotter via UDP. This format can only deal with ACARS, hence messages of all other types will be filtered out (ie. not sent to this particular output).binary- a format suitable for archiving raw frames without decoding
-
<output_type>specifies the type of the output. The following output types are supported:file- output to a fileudp- output to a remote host via UDP network socketzmq- output to a ZeroMQ publisher socket
-
<output_parameters>- specifies options for this output. The syntax is as follows:
param1=value1,param2=value2,...
The list of available formats and output types may vary depending on which
optional features have been enabled during program compilation and whether
necessary dependencies are installed (see "Dependencies" subsection above).
Run dumpvdl2 --output help to determine which formats and output types
are available on your system. It also shows all parameters supported by
each output type.
Back to the above example:
--output decoded:text:file:path=/some/dir/vdl2.log,rotate=hourly
It basically says: "take decoded frames, format them as text and output the
result to a file". Of course this output requires some more configuration - at
least it needs the path where the file is to be created. This is done by
specifying path=/some/dir/vdl2.log in the last field. The file output
driver also supports an optional parameter named rotate which indicates
how often the file is to be rotated, if at all.
A few more remarks about how output configuration works:
-
Multiple simultaneous outputs are supported. Just specify
--outputoption more than once. -
Not all combinations of
<what_to_output>and<output_format>are supported. For example it does not make sense to specifyraw:pp_acars:....because Planeplotter formatter can only deal with decoded ACARS messages. You will get anUnsupported data_type:format combination: 'raw:pp_acars'error message on startup if you try that. -
Not all combinations of
<output_format>and<output_type>are supported. For example,udpoutput only acceptstext,jsonandpp_acarsformats. If you try usingbinarywith that, you will get anUnsupported format:output combination: 'binary:udp'error message on startup. -
If dumpvdl2 is run without any
--outputoption, it creates a default output ofdecoded:text:file:path=-which causes decoded frames to be formatted as text and printed to standard output.
Outputs data to a file.
Supported formats: text, json, binary
Parameters:
-
path(required) - path to the output file. If it already exists, the data is appended to it. -
rotate(optional) - how often to rotate the file. Supported values:daily(at midnight UTC or LT depending on whether--utcoption is used) andhourly(rotate at the top of every hour). Default: no rotation.
Sends data to a remote host over network using UDP/IP.
Supported formats: text, json, pp_acars
Parameters:
-
address(required) - host name or IP address of the remote host -
port(required) - remote UDP port number
Note: UDP protocol does not guarantee successful message delivery (it works
on a "fire and forget" principle, no retransmissions, no acknowledgements, etc).
If you plan to use networked output for real, please use zmq driver. It works
on TCP and provides reliable transport regardless of the message size.
The primary purpose of udp driver is to feed Planeplotter with ACARS
messages using pp_acars format.
Opens a ZeroMQ publisher socket and sends data to it.
Supported formats: text, json, pp_acars
Parameters:
-
mode(required) - socket mode. Can beclientorserver. In the first case dumpvdl2 initiates a connection to the given consumer. In the latter case, dumpvdl2 listens on a port and expects consumers to connect to it. -
endpoint(required) - ZeroMQ endpoint. The syntax is:tcp://address:port. When working in server mode, it specifies the address and port where dumpvdl2 shall listen for incoming connections. In client mode it specifies the address and port of the remote ZeroMQ consumer where dumpvdl2 shall connect to.
Examples:
-
mode=server,endpoint=tcp://*:5555- listen on TCP port 5555 on all local addresses. -
mode=server,endpoint=tcp://10.1.1.1:6666- listen on TCP port 6666 on address 10.1.1.1 (it must be a local address). -
mode=client,endpoint=tcp://host.example.com:1234- connect to port 1234 on host.example.com.
Outputs may fail for various reasons. A file output may fail to write to the given path due to lack of permissions or lack of storage space, zmq output may fail to set up a socket due to incorrect endpoint syntax, etc. Whenever an output fails, the program disables it and prints a message on standard error, for example:
Could not open output file /etc/vdl2.log: Permission denied
output_file: could not write to '/etc/vdl2.log', output disabled
The program will continue to run and write data to all other outputs, except the failed one.
An output may also hang and stop processing messages (although this is a "shouldn't happen" situation). Messages will then accumulate in that output's queue. To prevent memory exhaustion, there is a high water mark limit on the number of messages that might be queued for each output. By default it is set to 1000 messages. If this value is reached, the program will not push any more messages to that output before messages get consumed and the queue length drops down. The following message is then printed on standard error for every dropped message:
<output_type> output queue overflow, throttling
Other outputs won't be affected, since each one is running in a separate thread and has its own message queue.
High water mark limit is disabled when dumpvdl2 is decoding data from a file
(ie. eiter --iq-file or --raw-frames-file option is in use). This allows
all queues to grow indefinitely, but it makes sure that no frames get dropped.
The high water mark threshold can be changed with --output-queue-hwm option.
Set its value to 0 to disable the limit.
The following options work globally across all outputs with text format:
-
Add
--utcoption if you prefer UTC timestamps rather than local timezone in output and filenames. -
Add
--millisecondsto print timestamps with millisecond resolution. -
Add
--raw-framesoption to display payload of AVLC frames in raw hex for debugging purposes. -
Add
--dump-asn1option to display full ASN.1 structure dumps of CPDLC and CM messages. -
Some ACARS and MIAM CORE messages contain XML data. Use
--prettify-xmloption to enable pretty-printing of such content. XML will then be reformatted with proper indentation for easier reading. This feature requires libacars built with libxml2 library support - otherwise this option has no effect. -
OHMA messages (ie. B737MAX diagnostics) contain XML data. Use
--prettify-jsonoption to enable pretty-printing of such content. JSON will be reformatted with proper indentation built for easier reading. This feature requires libacars 2.2.0 or later, built with jansson library support - otherwise this option has no effect.
VDL2 messages formatted as text are normally logged like this:
[2020-01-10 00:02:40 CET] [136.775] [-31.8/-51.6 dBFS] [19.8 dB] [-1.2 ppm]
06A0B7 (Aircraft, Airborne) -> 29E0C5 (Ground station): Response
AVLC type: S (Receive Ready) P/F: 0 rseq: 2
dumpvdl2 can optionally print more information about ground stations using data read from a text file. Each line in the file should have the following format:
hex_address [airport_icao_code ground_station_details] [ground_station_location]
Example:
29E0C5 [EDDB Berlin Schonefeld DE] [Berlin Schonefeld]
Add the following option to dumpvdl2 command line:
--gs-file /path/to/ground_station_file.txt
Provide the correct path to the file, of course.
Verbosity can be controlled with --addrinfo option, which takes three values:
--addrinfo normal (the default):
[2020-01-10 00:02:40 CET] [136.775] [-31.8/-51.6 dBFS] [19.8 dB] [-1.2 ppm]
06A0B7 (Aircraft, Airborne) -> 29E0C5 (Ground station): Response
GS info: EDDB, Berlin Schonefeld
AVLC type: S (Receive Ready) P/F: 0 rseq: 2
--addrinfo terse:
[2020-01-10 00:02:40 CET] [136.775] [-31.8/-51.6 dBFS] [19.8 dB] [-1.2 ppm]
06A0B7 (Aircraft, Airborne) -> 29E0C5 (Ground station) [EDDB]: Response
AVLC type: S (Receive Ready) P/F: 0 rseq: 2
--addrinfo verbose:
[2020-01-10 00:02:40 CET] [136.775] [-31.8/-51.6 dBFS] [19.8 dB] [-1.2 ppm]
06A0B7 (Aircraft, Airborne) -> 29E0C5 (Ground station): Response
GS info: EDDB Berlin Schonefeld DE
AVLC type: S (Receive Ready) P/F: 0 rseq: 2
dumpvdl2 reads the whole ground station data file on startup and caches it in memory. Whenever you make changes to the file, you have to restart the program in order for the changes to take effect.
If compiled with SQLite3 support, dumpvdl2 can read aircraft data from SQLite3
database in a well-known Basestation format used in various plane tracking
applications. Such data can be printed along the header of each message. Use
--bs-db /path/to/basestation.sqb option to enable the feature. --addrinfo
controls aircraft data verbosity in the same way as for ground stations (see
above). Example with --addrinfo set to normal:
[2020-01-10 00:02:40 CET] [136.775] [-31.8/-51.6 dBFS] [19.8 dB] [-1.2 ppm]
06A0B7 (Aircraft, Airborne) -> 29E0C5 (Ground station): Response
AC info: A7-BCS, B788, QTR
GS info: EDDB, Berlin Schonefeld
AVLC type: S (Receive Ready) P/F: 0 rseq: 2
dumpvdl2 reads data from Aircraft table. The following fields are used:
--addrinfo terse: Registration--addrinfo normal: Registration, ICAOTypeCode, OperatorFlagCode--addrinfo verbose: Registration, Manufacturer, Type, RegisteredOwners
ICAO hex code is read from ModeS field. All fields are expected to have a data
type varchar. ModeS field must be unique and non-NULL. Other fields are
allowed to be NULL (the program substitutes each NULL value with a dash).
Entries from the database are read on the fly, when needed. They are cached in memory for 30 minutes and then re-read from the database or purged.
ACARS messages, MIAM file transfers and X.25 packets are limited in size. Whenever there is a need to send a larger message than the protocol allows, it must be split into smaller parts (fragments). dumpvdl2 automatically reassembles such messages. Individual fragments are logged too, as they arrive. Only when all parts of the message are successfully received, dumpvdl2 cat reassemble the message and log its payload in one piece.
ACARS messages, MIAM file transfers and X.25 packets often contain binary data
of higher level protocols or applications, which dumpvdl2 can decode as well
(for example: CPDLC, ADS-C, IDRP or MIAM CORE). Such protocols would only decode
correctly when a complete payload is presented to the decoder. If the message is
fragmented, there is no point in decoding higher level protocol in individual
fragments, because this will often result in a partial decode with an
-- Unparseable <protocol name> PDU error printed to the log file. To reduce log
file cluttering, dumpvdl2 does not decode higher level protocols in fragmented
packets. Data contained in individual fragments are printed in hex, but this
does not mean that the packet type is unknown - it's just not decodable yet.
When all the fragments have been received and correctly reassembled, the packet
will be decoded and logged in full.
Before version 1.8.0, dumpvdl2 always attempted to decode higher level
protocols, regardless of whether the packet was a fragment of a larger packet or
not. You can enable the old behaviour by adding --decode-fragments command
line option.
dumpvdl2 can send ACARS messages to Planeplotter, which in turn can extract aircraft position information from them and display blips on the map. First, configure your Planeplotter as follows:
-
Stop data processing (press 'Stop' button on the toolbar)
-
Go to Options / I/O Settings...
-
Tick 'UDP/IP Data from net'
-
Set 'UDP/IP local port' to some value (default is 9742)
-
Close the settings window by clicking OK and restart data processing
Supply dumpvdl2 with the address (or host name) and port where the Planeplotter is listening:
./dumpvdl2 --output decoded:pp_acars:udp:address=10.10.10.12,port=9742 [other_options]
That's all. Switch to 'Message view' in Planeplotter and look for incoming messages.
By default dumpvdl2 logs all decoded messages. You can use --msg-filter option
to ignore things you don't want to see. If you do not want messages sent by
ground stations, run the program like this:
./dumpvdl2 --msg-filter all,-uplink [other_options]
Or if you want to filter out empty ACARS messages, because they are boring, use this:
./dumpvdl2 --msg-filter all,-acars_nodata [other_options]
For full list of supported filtering options, run:
./dumpvdl2 --msg-filter help
Refer to doc/FILTERING_EXAMPLES.md file for more examples and details.
If the program has been compiled with -DCMAKE_BUILD_TYPE=Debug, there is
--debug option available. It controls debug message classes which should (or
should not) be printed to standard error. This works in the same way as message
filters described above. Run the program with --debug help to list all debug
message classes available.
The program does not calculate statistics by itself. Instead, it sends metric values (mostly counters) to the external collector using Etsy StatsD protocol. It's the collector's job to receive, aggregate, store and graph them. Some examples of software which can be used for this purpose:
-
Collectd is a statistics collection daemon which supports a lot of metric sources by using various plugins. It has a StatsD plugin which can receive statistics emitted by dumpvdl2, aggregate them and write to various time-series databases like RRD, Graphite, MongoDB or TSDB.
-
Graphite is a time-series database with powerful analytics and aggregation functions. Its graphing engine is quite basic, though.
-
Grafana is a sophisticated and elegant graphing solution supporting a variety of data sources.
Here is an example of some dumpvdl2 metrics being graphed by Grafana:
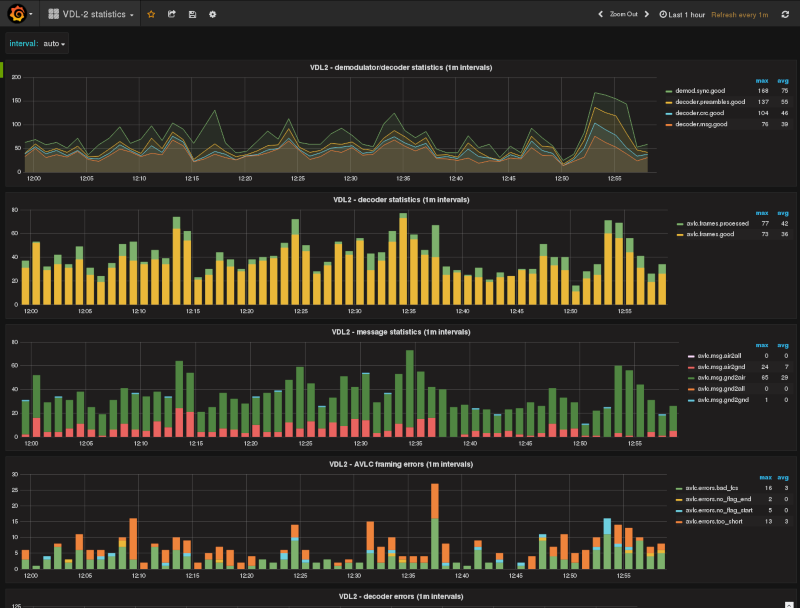
Metrics are quite handy when tuning the antenna installation or receiver parameters (like gain or correction).
To enable statistics just give dumpvdl2 your StatsD collector's hostname (or IP address) and UDP port number, for example:
./dumpvdl2 --statsd 10.10.10.15:1234 [other_options]
The syntax is:
dumpvdl2 --iq-file <file_name> [--sample-format <sample_format>] [--oversample <oversample_rate>]
[--centerfreq <center_frequency>] [vdl_freq_1] [vdl_freq_2] [...]
Specify - as the file name to read data from standard input.
The symbol rate for VDL2 is 10500 symbols/sec. dumpvdl2 internal processing rate
is 10 samples per symbol. Therefore the file must be recorded with sampling rate
set to an integer multiple of 105000. Specify the multiplier value with
--oversample option. The default value is 10, which is valid for files sampled
as 1050000 samples/sec. For example, if you have recorded your file at 2100000
samples/sec, then use --oversample 20 (because 105000 * 20 = 2100000).
The program accepts raw data files without any header. Files produced by
rtl_sdr and miri_sdr programs are perfectly valid input files. Different
radios produce samples in different formats, though. dumpvdl2 currently supports
following sample formats:
U8- unsigned 8-bit samples. This is the format produced byrtl_sdrutility.S16_LE- 16-bit signed, little endian. Produced bymiri_sdrutility (by default).
Use --sample-format option to set the format. The default format is U8.
The program assumes that the VDL2 channel is located at baseband (0 Hz), ie. the center frequency of your radio was set to the VDL2 channel frequency during recording. If this is not the case, you have to provide correct center frequency and channel frequency. For example, if your receiver was tuned to 136.955 MHz during recording and you want to decode the VDL2 channel located at 136.975 MHz, then use this:
dumpvdl2 --iq-file <file_name> --centerfreq 136955000 136975000
Putting it all together:
dumpvdl2 --iq-file iq.dat --sample-format S16_LE --oversample 13 --centerfreq 136955000 136975000 136725000
processes iq.dat file recorded at 1365000 samples/sec using 16-bit signed
samples, with receiver center frequency set to 136.955 MHz. VDL2 channels
located at 136.975 and 136.725 MHz will be decoded.
Raw AVLC frames saved in a file with:
dumpvdl2 --output raw:binary:file:path=/some/dir/file.raw [...]
can be decoded anytime later with:
dumpvdl2 --raw-frames-file /some/dir/file.raw --output [...]
As there is no demodulation done in this case, there is no need to specify
any radio-related options, like --centerfreq or channel frequencies.
Specify - as the file name to read data from standard input.
There is an example systemd unit file in etc subdirectory (which means you
need a systemd-based distribution, like Debian/Raspbian Jessie or newer).
First, go to dumpvdl2 source directory and install the binary to /usr/local/bin:
sudo make install
Copy the unit file to the systemd unit directory:
sudo cp etc/dumpvdl2.service /etc/systemd/system/
Copy the example environment file to /etc/default directory:
sudo cp etc/dumpvdl2 /etc/default/
Edit /etc/default/dumpvdl2 with a text editor (eg. nano). Uncomment the
DUMPVDL2_OPTIONS= line and put your preferred dumpvdl2 option set there.
Example:
DUMPVDL2_OPTIONS="--rtlsdr 0 --gain 39 --correction 0 --output decoded:text:file:path=/home/pi/vdl2.log,rotate=daily 136975000 136875000 136775000"
Reload systemd configuration:
sudo systemctl daemon-reload
Start the service:
sudo systemctl start dumpvdl2
Verify if it's running:
systemctl status dumpvdl2
It should show: Active: active (running) since <date>. If it failed, it might
be due to an error in the DUMPVDL2_OPTIONS value. Read the log messages in the
status output and fix the problem.
If everything works fine, enable the service, so that systemd starts it automatically at boot:
systemctl enable dumpvdl2
There are a few additions to the program in the extras directory in the source
tree. Refer to the README.md file in that directory for the current list of
extras and their purpose.
VDL (VHF Data Link) Mode 2 is a communication protocol between aircraft and a network of ground stations. It has a higher capacity than ACARS and a lot more applications. More information can be found on Wikipedia or SigIdWiki.
Large transport aircraft operators - civil airlines and some military.
The most ubiquitous is 136.975 MHz (so called Common Signalling Channel). In some areas where the capacity of a single channel is not enough, 136.725, 136.775 or 136.875 is used as well. Because they are closely spaced, dumpvdl2 can receive all of them simultaneously with a single receiver.
It's quite probable. Launch your favorite SDR Console (like SDRSharp or GQRX), tune 136.975 MHz and place your antenna outside (or near the window, at least). If you see short bursts every now and then, it's there.
VDL2 runs on VHF airband, so if you already have a dedicated antenna for ACARS or airband voice, it will be perfect for VDL2. However VDL2 transmissions are not very powerful, so do not expect thousands of messages per hour, if your antenna is located indoors. If you have already played with ADS-B, you know, what to do - put the antenna outside and high with unobstructed sky view, use short and good quality feeder cable, shield your radio from external RF interference.
It basically comes down to three things:
-
set your tuner gain quite high. I get good results with 40 dB for RTLSDR and 75 dB for Mirics dongles. Do not be tempted to crank the gain up to the max. Keep your noise floor low because higher noise yields higher bit error rate and may cause signal clipping when the transmission is strong (eg. the transmitting aircraft is just overflying your antenna). On SDRPlay it should be good enough to use auto gain control.
-
observe the waterfall in your favorite SDR console app, using the same gain setting - do you see data bursts clearly? (they are very short, like pops).
-
if your DC spike is very high, set the center frequency manually to dodge it (use
--centerfreqoption). -
RTL dongles are cheap - some of them have higher noise figure than others. If you have several dongles at hand, just try another one.
- initially, just don't set it manually, use the default of 136.975 MHz. It is used everywhere where VDL2 is available.
- oscillators in cheap receivers are not 100% accurate. It is usually necessary to introduce manual correction to get precise tuning. There is no one-size-fits-all correction value - it is receiver-specific. See next question.
Method 1: use rtl_test utility which comes with librtlsdr library. Run
it with -p option and observe the output:
root@linux:~ # rtl_test -p
Found 1 device(s):
0: Realtek, RTL2838UHIDIR, SN: 00000002
Using device 0: Generic RTL2832U OEM
Found Rafael Micro R820T tuner
Supported gain values (29): 0.0 0.9 1.4 2.7 3.7 7.7 8.7 12.5 14.4 15.7 16.6 19.7 20.7 22.9 25.4 28.0 29.7 32.8 33.8 36.4 37.2 38.6 40.2 42.1 43.4 43.9 44.5 48.0 49.6
[R82XX] PLL not locked!
Sampling at 2048000 S/s.
Reporting PPM error measurement every 10 seconds...
Press ^C after a few minutes.
Reading samples in async mode...
real sample rate: 2048207 current PPM: 101 cumulative PPM: 101
real sample rate: 2048159 current PPM: 78 cumulative PPM: 89
real sample rate: 2048137 current PPM: 67 cumulative PPM: 81
real sample rate: 2048184 current PPM: 90 cumulative PPM: 84
real sample rate: 2048163 current PPM: 80 cumulative PPM: 83
real sample rate: 2048165 current PPM: 81 cumulative PPM: 82
real sample rate: 2048140 current PPM: 69 cumulative PPM: 81
real sample rate: 2048178 current PPM: 87 cumulative PPM: 81
real sample rate: 2048168 current PPM: 82 cumulative PPM: 81
real sample rate: 2048117 current PPM: 57 cumulative PPM: 79
real sample rate: 2048202 current PPM: 99 cumulative PPM: 81
real sample rate: 2048173 current PPM: 85 cumulative PPM: 81
real sample rate: 2048164 current PPM: 80 cumulative PPM: 81
real sample rate: 2048135 current PPM: 66 cumulative PPM: 80
real sample rate: 2048179 current PPM: 88 cumulative PPM: 80
real sample rate: 2048170 current PPM: 83 cumulative PPM: 81
real sample rate: 2048167 current PPM: 82 cumulative PPM: 81
real sample rate: 2048155 current PPM: 76 cumulative PPM: 80
real sample rate: 2048160 current PPM: 78 cumulative PPM: 80
real sample rate: 2048159 current PPM: 78 cumulative PPM: 80
real sample rate: 2048154 current PPM: 75 cumulative PPM: 80
real sample rate: 2048155 current PPM: 76 cumulative PPM: 80
real sample rate: 2048181 current PPM: 89 cumulative PPM: 80
After a couple of minutes the cumulative PPM value converges to a stable
reading. This is an approximate correction value for your dongle. Run dumpvdl2
with --correction <value> option. dumpvdl2 can compensate correction errors up
to a certain amount. Once you have received some messages, look for the
frequency offset field which is printed in the header of each message (it's the
value expressed in ppm). Your tuning is good, when this value is close to 0. If
you see a systematic offset from 0, tweak your correction value to compensate
it.
[2017-02-26 19:18:00 GMT] [136.975] [-18.9/-43.9 dBFS] [25.0 dB] [0.4 ppm]
From left to right:
-
date and time with timezone.
-
channel frequency on which the message has been received.
-
signal power level (averaged over all symbol sampling points in the burst). Full scale is 0 dB.
-
noise floor power level. Full scale is 0 dB.
-
signal to noise ratio (ie. signal power level minus noise floor power level).
-
frequency offset of the received burst from the channel center frequency, in parts per million.
There is an --extended-header command line option which enables additional
fields:
[2017-02-26 19:18:00 GMT] [136.975] [-18.9/-43.9 dBFS] [25.0 dB] [0.4 ppm] [S:0] [L:34] [F:0] [#0]
-
number of bit errors corrected in the VDL2 burst header (up to 2).
-
burst length in octets.
-
number of octets corrected by Reed-Solomon FEC.
-
number of frame in this particular transmission. Multiple AVLC frames (messages) may be concatenated and sent as a single transmission burst. When a multiframe burst is received, frames will be numbered incrementally.
dumpvdl2 does not have log colorization feature. But there is an app named
MultiTail which you can use to follow dumpvdl2 log file in real time, as it grows,
with optional colorization. It's just a matter of writing a proper colorization
scheme (it tells the program what words or phrases to colorize and what color to
use). Refer to multitail-dumpvdl2.conf file in the extras subdirectory for
an example. To use it:
- Install the program:
sudo apt install multitail
- Copy the example colorization scheme to
/etc:
sudo cp extras/multitail-dumpvdl2.conf /etc
- Include the color scheme into the main MultiTail configuration file:
sudo echo "include:/etc/multitail-dumpvdl2.conf" >> /etc/multitail.conf
- You can only colorize the file while it grows. So assuming that dumpvdl2 is
running and writing its log into
vdl2.logfile in the current directory, type the following:
multitail -cS dumpvdl2 vdl2.log
-cS dumpvdl2 option select the color scheme named dumpvdl2.
Yes. There is no header in the file, just data. Concatenated file should therefore decode correctly.
Here it is:
<length><frame_data><length><frame_data>...
where:
-
<length>is an unsigned 16-bit value in network order (ie. most significant byte first). It indicates the length of the following<frame_data>block plus the length of the length field itself. So the length of00 5bindicates that the following<frame_data>block is 89 bytes long (2+89 = 91 = 0x5b). -
<frame_data>is a structure containing raw AVLC frame octets and its metadata, encoded as a Google protocol buffer. Refer to theproto/dumpvdl2.protofile for the specification of the structure.
You can learn how to deal with protocol buffers from here.
Here is how to do it in Python, assuming that you are running Raspbian Buster or later.
First, install python3-zmq:
apt install python3-zmq
Scenario 1: dumpvdl2 works as a client, Python script is a server:
import zmq, sys
context = zmq.Context()
socket = context.socket(zmq.SUB)
socket.bind(sys.argv[1])
socket.setsockopt_string(zmq.SUBSCRIBE, '')
while True:
string = socket.recv_string()
print(string)Save the script in a file (for example, zmqserver.py) and run it like so:
python3 zmqserver.py tcp://*:5555
Assuming that the above script is running on a machine with an IP address of
10.10.10.1, you can then run dumpvdl2 with zmq output set to client mode like
this:
dumpvdl2 --output decoded:text:zmq:mode=client,endpoint=tcp://10.10.10.1:5555 [...]
Scenario 2: dumpvdl2 works as a server, Python script is a client:
import zmq,sys
context = zmq.Context()
socket = context.socket(zmq.SUB)
socket.connect(sys.argv[1])
socket.setsockopt_string(zmq.SUBSCRIBE, '')
while True:
string = socket.recv_string()
print(string)So the only difference is that now the script calls socket.connect() instead
of socket.bind(). Assuming that dumpvdl2 will be run on a machine with an IP
address of 10.10.10.2, save the script as zmqclient.py and run it as follows:
python3 zmqclient.py tcp://10.10.10.2:5555
Then start dumpvdl2 in ZeroMQ server mode:
dumpvdl2 --output decoded:text:zmq:mode=server,endpoint=tcp://*:5555
Both scripts print arriving messages to standard output.
The advantage of the second scenario is that dumpvdl2 can serve multiple clients
using just a single zmq output. However the first scenario may come in handy
if dumpvdl2 is running behind a firewall which does not permit connections from
the outside. In this case if the output is to be sent to multiple consumers,
each one must be configured as a separate zmq output.
I collect data in JSON format over network from several receivers. Is there a way to determine which receiver each frame came from?
Use --station-id <name> option to set the name of the receiver. This name will
be put into station attribute at top level of every JSON-formatted message.
Maybe. However do not expect me to purchase all SDRs available on the market just to make dumpvdl2 work with them. If your life absolutely depends on it, consider donating, or at least lending me the hardware for some time for development and testing.
Alternatively, if you can write code, you may do the work by yourself and submit it as a pull request. Most of the program code is hardware-agnostic anyway. Adding new device type basically comes down to the following:
-
dumpvdl2.c,dumpvdl2.h- add new input type and necessary command line options. -
rtl.c,rtl.h- this is the code specific to the RTLSDR hardware. Make a copy and modify it to use the API of your SDR device. Or you can start off frommirics.candmirics.h, if you prefer. -
demod.c- if your SDR device uses a sample format other than 8-bit unsigned and 16-bit signed, it is necessary to write a routine which handles this format and converts the samples to signed float in the <-1;1> range. Refer toprocess_buf_uchar()andprocess_buf_short()routines for details. -
CMakeLists.txt- copy the section containingfind_package(RTLSDR)and modify it, so that it finds all the necessary libraries and header file locations and appends them to relevant build variables. Make sure that the program still builds correctly when the library for your new SDR type is not installed or has been disabled by the user. Add the appropriate information to the configuration summary which is printed at the end.
Maybe. I may do it one day, but it's not currently top priority.
I hereby express my gratitude to everybody who helped with the development and testing of dumpvdl2. Special thanks go to:
- Fabrice Crohas
- Dick van Noort
- acarslogger
- Piotr Herko, SP5XSB
- LamaBleu
Copyright (c) 2017-2023 Tomasz Lemiech szpajder@gmail.com
Contains code from the following software projects:
-
libfec, (c) 2006 by Phil Karn, KA9Q
-
Rocksoft^tm Model CRC Algorithm Table Generation Program V1.0 by Ross Williams
-
DarwinPthreadBarrier, (c) 2015, Aleksey Demakov
-
librtlsdr-keenerd, (c) 2013-2014 by Kyle Keen
-
asn1c, (c) 2003-2017 by Lev Walkin and contributors
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
// vim: textwidth=80