野火PID调试助手驱动,适用于ESP系列,基于ESP-IDF5.0开发
ESP-IDF4.4可用吗?理论来说可用,但是未经过测试
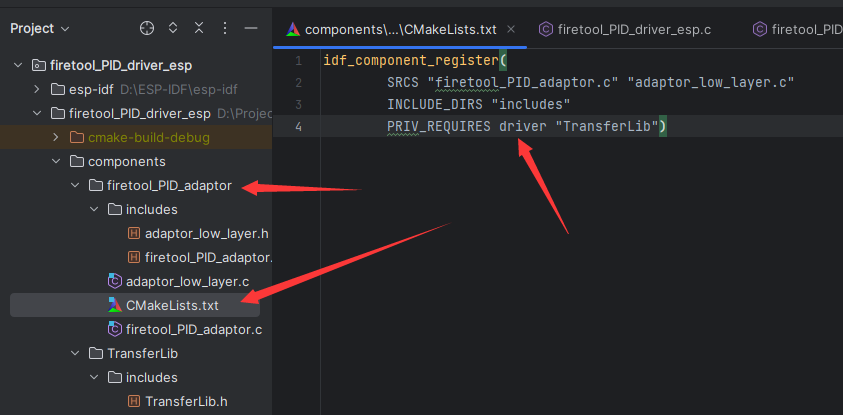
在 firetool_PID_adaptor 下找到 CMakeLists.txt ,其中5.0版本移除了driver的默认导入,4.4默认导入 driver ,4.4版本理论来说可用,但是未经测试。
项目使用两层结构编写,底层和高层,底层负责串口的初始化和数据发送,高层负责数据处理和实现功能。
此项目使用面向对象思想编写,支持多个串口创建多个实例,但是不建议使用,建议通过野火PID调试助手的“通道”功能发送多组数据
├─components
│ ├─firetool_PID_adaptor
│ │ │ adaptor_low_layer.c 库底层
│ │ │ CMakeLists.txt
│ │ │ firetool_PID_adaptor.c 库高层
│ │ │
│ │ └─includes
│ │ adaptor_low_layer.h
│ │ firetool_PID_adaptor.h
│ │
│ └─TransferLib
│ │ CMakeLists.txt
│ │ TransferLib.c 负责数据格式转换
│ │
│ └─includes
│ TransferLib.h
│
└─main
CMakeLists.txt
firetool_PID_driver_esp.c 示例应用移植此库修改底层即可。
修改内容在adaptor_low_layer.h下
本库源代码如下:
/**调用初始化函数之前必须先调用设置回调函数函数!!!!!!**/
//定义串口类
typedef struct{
uart_config_t uart_config;
int uart_num;
}AdaptorUart;uart_config_t 即为串口配置结构体,uart_num 即为MCU中的串口设备,比如使用第二个串口设备,在IDF中就应在au_init_uart中传入UART_NUM_2,然后赋值给uart_num, 移植时需要修改AdaptorUart中的内容。
修改内容在adaptor_low_layer.c下
此函数主要是对上面说过的类结构体中的uart_config_t 以及其他成员进行赋值操作,然后安装串口(取决于MCU的开发方式)
本库部分源代码:
void au_init_uart(AdaptorUart * adaptor_uart, int band_rate, int rx_pin,
int tx_pin, int uart_num, int buffer_size)
{
//设置串口参数
adaptor_uart->uart_config.baud_rate = band_rate;
adaptor_uart->uart_config.data_bits = UART_DATA_8_BITS;
adaptor_uart->uart_config.parity = UART_PARITY_DISABLE;
adaptor_uart->uart_config.stop_bits = UART_STOP_BITS_1;
adaptor_uart->uart_config.flow_ctrl = UART_HW_FLOWCTRL_DISABLE;
adaptor_uart->uart_config.source_clk = UART_SCLK_DEFAULT;
//存储必要值
adaptor_uart->uart_num = uart_num;
//set uart param
ESP_ERROR_CHECK(uart_param_config(uart_num, &adaptor_uart->uart_config));
//set uart pins
ESP_ERROR_CHECK(uart_set_pin(uart_num, tx_pin, rx_pin,
UART_PIN_NO_CHANGE,UART_PIN_NO_CHANGE));
//driver install
ESP_ERROR_CHECK(uart_driver_install(uart_num, buffer_size,
buffer_size, 20,
&uart1_queue,0));
}修改内容在adaptor_low_layer.c下
au_init_uart()将相关部分初始化好之后这里直接写发送和接收逻辑就可以。
本库源代码:
/**
* @brief 发送字节函数
* @param adaptor_uart 串口类
* @param contents 发送内容
* @param len 发送的字节个数
* @return 发送的字节个数
*/
int au_uart_send_bytes(AdaptorUart * adaptor_uart, char * contents, int len)
{
return uart_write_bytes(adaptor_uart->uart_num, contents, len);
}
/**
* @brief 接收字节函数
* @param adaptor_uart 串口类
* @param data 存放接收内容的内存空间
* @param max_len 存放接收内容的内存空间大小
* @return 本次接收的字节个数,如果缓存已有的数据大于max_len,则只返回max_len大小的数据,
* 反之则返回缓冲区的全部数据
*/
int au_uart_read_bytes(AdaptorUart * adaptor_uart, char * data, int max_len)
{
int rev_data_len = 0;
//检查接收缓冲区中是否有数据
ESP_ERROR_CHECK(uart_get_buffered_data_len(adaptor_uart->uart_num, (size_t*)&rev_data_len));
if(rev_data_len != 0){
if(rev_data_len <= max_len)
return uart_read_bytes(adaptor_uart->uart_num, data, rev_data_len,
0);
else return uart_read_bytes(adaptor_uart->uart_num, data, max_len,
0);
}
return 0;
}修改内容在adaptor_low_layer.c下
中断函数的目的只有一个,发生中断之后调用回调(received_data_cb())函数。
IDF中断函数的实现类似轮询方式,STM32等直接在对应的中断函数中调用received_data_cb()函数传入对应数据即可。
IDF事件监听函数:
/**
* @brief 事件监听函数,可以理解为中断读取数据
* @param pvPara
*/
void uart_event_task(void * pvPara)
{
uart_event_t event;
AdaptorUart * adaptorUart_rev = (AdaptorUart * )pvPara;
while(1){
if(xQueueReceive(uart1_queue, &event, portMAX_DELAY)){
//UART接收到数据
if (event.type == UART_DATA){
//malloc大小
uint16_t rev_size = 1024;
char * received_data = malloc(rev_size * sizeof(char ));
if (received_data != NULL){
int received_length = 0;
received_length = au_uart_read_bytes(adaptorUart_rev,
received_data, rev_size);
//调用用户自定义回调函数,进行数据处理
if(received_length != 0)
{
received_data_cb(adaptorUart_rev, received_data,
received_length);
}
free(received_data);
}else{
assert("malloc the memory failed!\n");
}
}
}
}
}