This repo contains code for our ICRA 2021 paper -
Vishnu Sashank Dorbala, Arjun Srinivasan, Aniket Bera
Please do cite our work if you found it useful:
@inproceedings{dorbala2021can,
title={Can a Robot Trust You?: A DRL-Based Approach to Trust-Driven Human-Guided Navigation},
author={Dorbala, Vishnu Sashank and Srinivasan, Arjun and Bera, Aniket},
booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},
pages={3538--3545},
year={2021},
organization={IEEE}
}
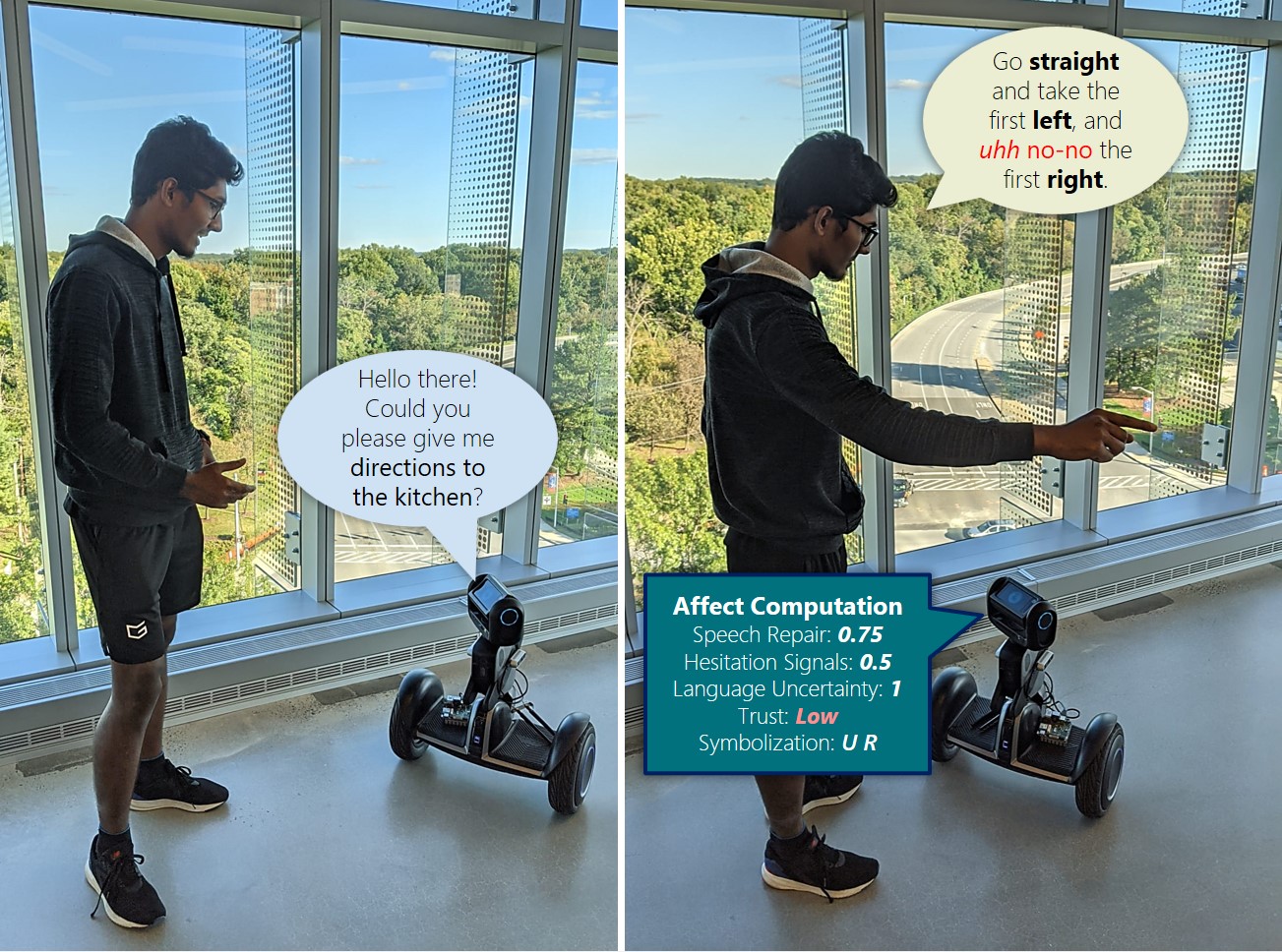
Humans are known to construct cognitive maps
of their everyday surroundings using a variety of perceptual
inputs. As such, when a human is asked for directions to a
particular location, their wayfinding capability in converting
this cognitive map into directional instructions is challenged.
Owing to spatial anxiety, the language used in the spoken
instructions can be vague and often unclear. To account for
this unreliability in navigational guidance, we propose a novel
Deep Reinforcement Learning (DRL) based trust-driven robot
navigation algorithm that learns humans’ trustworthiness to
perform a language guided navigation task.
Our approach seeks to answer the question as to whether
a robot can trust a human’s navigational guidance or not. To
this end, we look at training a policy that learns to navigate
towards a goal location using only trustworthy human guidance,
driven by its own robot trust metric.
For the DRL pipeline, refer to instructions in the DRL_exps folder.
For the Gazebo environment, refer to instructions in the gazebo_exps folder.
For the Lang2Symb dataset, refer to the Qualtrics survey conducted in the Lang2Symb folder.