This repository contains a modified version of GTSAM, which has been updated for GNSS data processing. To enable RINEX file reading and GNSS observation modeling, the GPSTk library is utilized. A detailed description of the modification made can be found in "Evaluation of Kinematic Precise Point Positioning Convergence with an Incremental Graph Optimizer". This software has been cleared for public release by the USAF Case # 88ABW-2018-0905
If you utilze this software for an academic purpose, please consider using the following citation:
@inproceedings{ watson2018evaluation,
title={Evaluation of kinematic precise point positioning convergence with an incremental graph optimizer},
author={Watson, Ryan M and Gross, Jason N},
booktitle={2018 IEEE/ION Position, Location and Navigation Symposium (PLANS)},
pages={589--596},
year={2018},
organization={IEEE}
}
- Boost -->
sudo apt-get install libboost-all-dev - CMake -->
sudo apt-get install cmake
- Intel TBB -->
sudo apt-get install libtbb-dev - Intel MKL
- PPP-BayesTree -->
git clone https://github.com/wvu-navLab/PPP-BayesTree.git
cd PPP-BayesTree/truck/gtsam;
mkdir build && cd build;
cmake --CMAKE_BUILD_TYPE Release ..
make
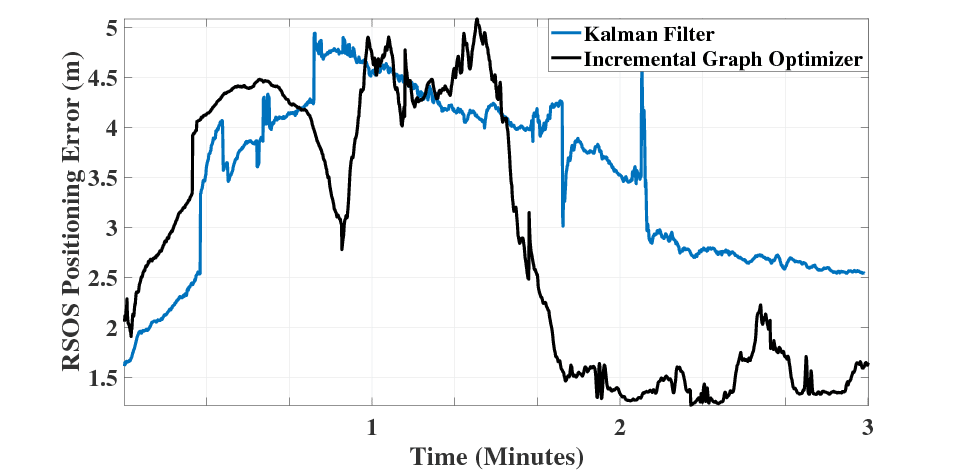
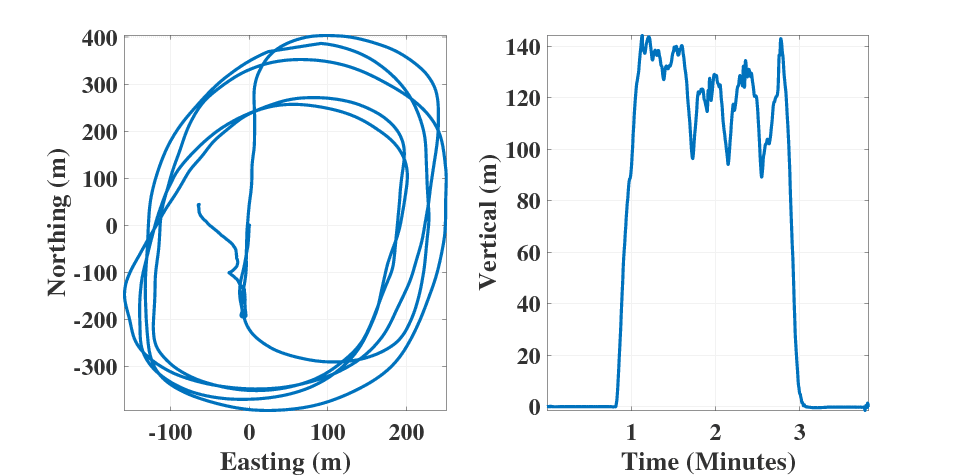
As an example, a sample data-set is provided. This data-set was collected at West Virginia University on-board a small, fixed-wing UAV --- this platform is known as the Phastball. The two images below, we provide an in-flight image from the Phastball, and the flight profile.

Using the provided data-set, the PPP Bayes tree example can be utilized as shown below.
cd ../data
./../build/examples/pppBayesTree -c phastball.conf