Example of a realtime continuous track simulation for the Gazebo simulator & ROS. The blue and green ones are based on the proposed method with or without grousers. The red one is based on a conventional method by multiple wheels.
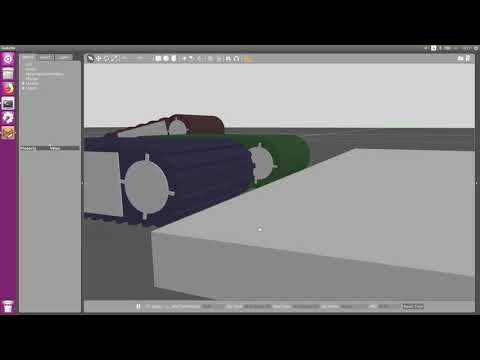
Y. Okada, S. Kojima, K. Ohno and S. Tadokoro, "Real-time Simulation of Non-Deformable Continuous Tracks with Explicit Consideration of Friction and Grouser Geometry," 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020
- Gazebo7 + ROS Kinetic + Ubuntu 16.04
- Gazebo9 + ROS Melodic + Ubuntu 18.04
- Update Gazebo from the OSRF apt repository (ref)
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get upgrage
- Clone relative packages
cd <your-ros-ws>/src
git clone git@github.com:yoshito-n-students/gazebo_continuous_track.git
git clone git@github.com:yoshito-n-students/gazebo_continuous_track_example.git
- Build
catkin_make
- Spawn tracked vehicles in Gazebo
cd <your-ros-ws>
source devel/setup.bash
roslaunch gazebo_continuous_example example_track_all_world.launch
- (On another terminal) Send a velocity command to the vehicles
rostopic pub /cmd_vel std_msgs/Float64 "data: 0.5"