=======
PMSNet-Tensorflow
根据 "Pyramid Stereo Matching Network" paper (CVPR 2018) 在源代码基础上使用tensorflow进行移植(源代码使用的pytorch)
@inproceedings{chang2018pyramid,
title={Pyramid Stereo Matching Network},
author={Chang, Jia-Ren and Chen, Yong-Sheng},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages={5410--5418},
year={2018}
}
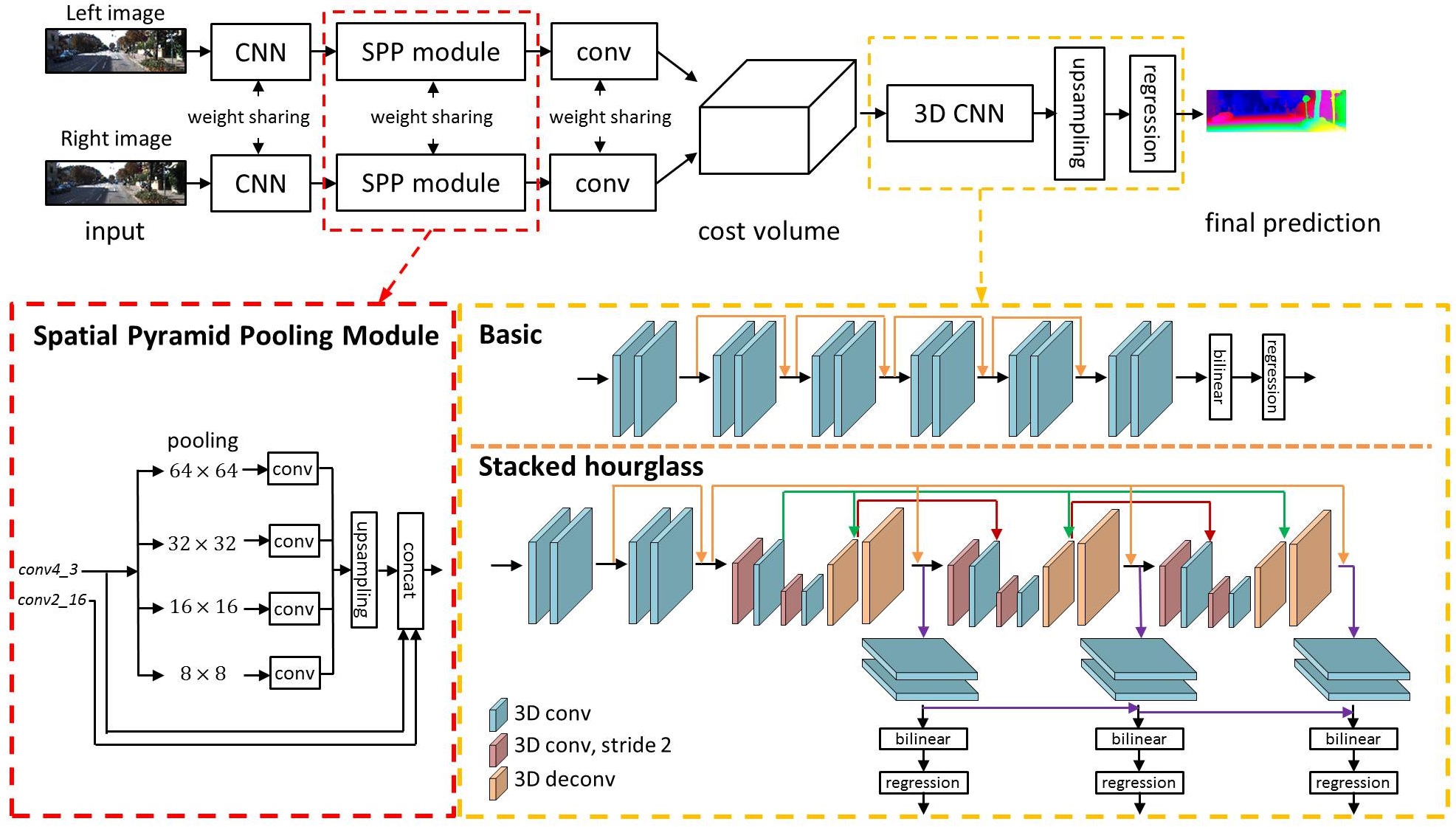
Recent work has shown that depth estimation from a stereo pair of images can be formulated as a supervised learning task to be resolved with convolutional neural networks (CNNs). However, current architectures rely on patch-based Siamese networks, lacking the means to exploit context information for finding correspondence in illposed regions. To tackle this problem, we propose PSMNet, a pyramid stereo matching network consisting of two main modules: spatial pyramid pooling and 3D CNN. The spatial pyramid pooling module takes advantage of the capacity of global context information by aggregating context in different scales and locations to form a cost volume. The 3D CNN learns to regularize cost volume using stacked multiple hourglass networks in conjunction with intermediate supervision.
- Python3.6
- Tensorflow(1.3.0)
- PIL
- KITTI Stereo
- Scene Flow
- 移植了KITTI2012数据集的读取工作
- 移植了preprocess中的部分函数
- 移植了KITTILoader,满足基本的数据读取
- 在tensorflow框架下完成了CNN子模块
- 在tensorflow框架下完成了SPP子模块
- 在tensorflow框架下完成了CNN3D子模块(这里只重写了论文中提到的stacked hourglass结构)
- 在tensorflow框架下完成了视差回归和损失函数
- 对main函数进行改写,满足输入输出需求
- 完善整体的model
- 加入论文中basic的模型
- 加入模型的保存和读取模块
- 加入tensorboard可视化需要的操作
- 完善输入和输出
- 整体进行训练
- 完善整体的model
- 加入训练SceneFlow数据集与KITTI数据集模块(data_loader为读取KITTI数据集,load_SceneFlow为读取SceneFlow数据集,由于SceneFlow数据集中,视差图为PFM格式,需要注意,为了加快数据读取的速度,在训练SceneFlow数据集时,首先需要运行generate_image_list.py得到整个数据集的地址)
- 完成模型的保存和读取模块
- 完成tensorboard可视化需要的操作
- 完成输入和输出
- 可以进行整体进行训练