| title | cover | categories | tags | toc | abbrlink | date | ||
|---|---|---|---|---|---|---|---|---|
Android 11 Sensor System源码分析(1):Sensor流程分析 |
|
|
true |
20230416 |
2023-04-16 09:16:16 -0700 |
注:文章都是通过阅读各位前辈总结的资料、Android 11 Rockchip平台源码、加上自己的思考分析总结出来的,其中难免有理解不对的地方,欢迎大家批评指正。文章为个人学习、研究、欣赏之用,图文内容整理自互联网,如有侵权,请联系删除(◕‿◕),转载请注明出处(©Rockchip ©Android @Linux 版权所有),谢谢。
(==文章基于 Android 11.0==)
正是由于前人的分析和总结,帮助我节约了大量的时间和精力,特别感谢,由于不喜欢图片水印,去除了水印,敬请谅解!!!
==源码(部分)==:
xxx
==源码(部分)==:
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\interfaces\sensors\1.0\default\android.hardware.sensors@1.0-service.rc
service vendor.sensors-hal-1-0 /vendor/bin/hw/android.hardware.sensors@1.0-service
interface android.hardware.sensors@1.0::ISensors default
class hal
user system
group input system wakelock uhid context_hub
capabilities BLOCK_SUSPEND
rlimit rtprio 10 10
on post-fs-data
chown system system /dev/ttyHS11
chmod 0777 /dev/ttyHS11
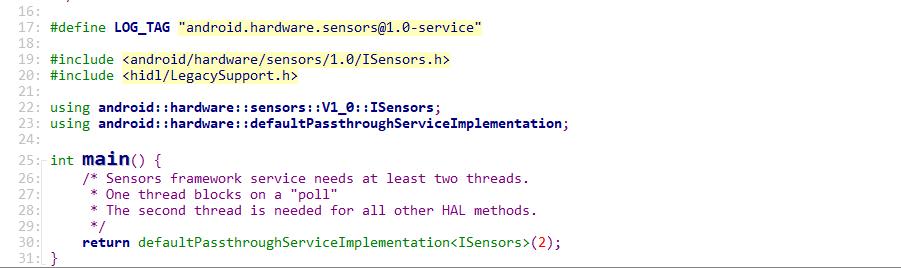
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\interfaces\sensors\1.0\default\service.cpp
首先看看Trace:
01-01 08:00:04.137 459 459 D android.hardware.sensors@1.0-service: HIDL_FETCH_ISensors
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #00 pc 00000000000098b4 /vendor/lib64/hw/android.hardware.sensors@1.0-impl.so (HIDL_FETCH_ISensors+80)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #01 pc 00000000000604dc /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)::'lambda'(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const+96)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #02 pc 000000000005b904 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::openLibs(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)> const&)+948)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #03 pc 000000000005e9e8 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)+92)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #04 pc 000000000005ca20 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::details::getRawServiceInternal(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, bool, bool)+1600)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #05 pc 000000000005a560 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::details::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<int (android::sp<android::hidl::base::V1_0::IBase> const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #06 pc 000000000005a8e0 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+56)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #07 pc 00000000000011dc /vendor/bin/hw/android.hardware.sensors@1.0-service
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #08 pc 000000000000109c /vendor/bin/hw/android.hardware.sensors@1.0-service (main+84)
01-01 08:00:04.144 459 459 D android.hardware.sensors@1.0-service: #09 pc 00000000000499fc /apex/com.android.runtime/lib64/bionic/libc.so (__libc_init+108)
Stack Trace:
RELADDR FUNCTION FILE:LINE
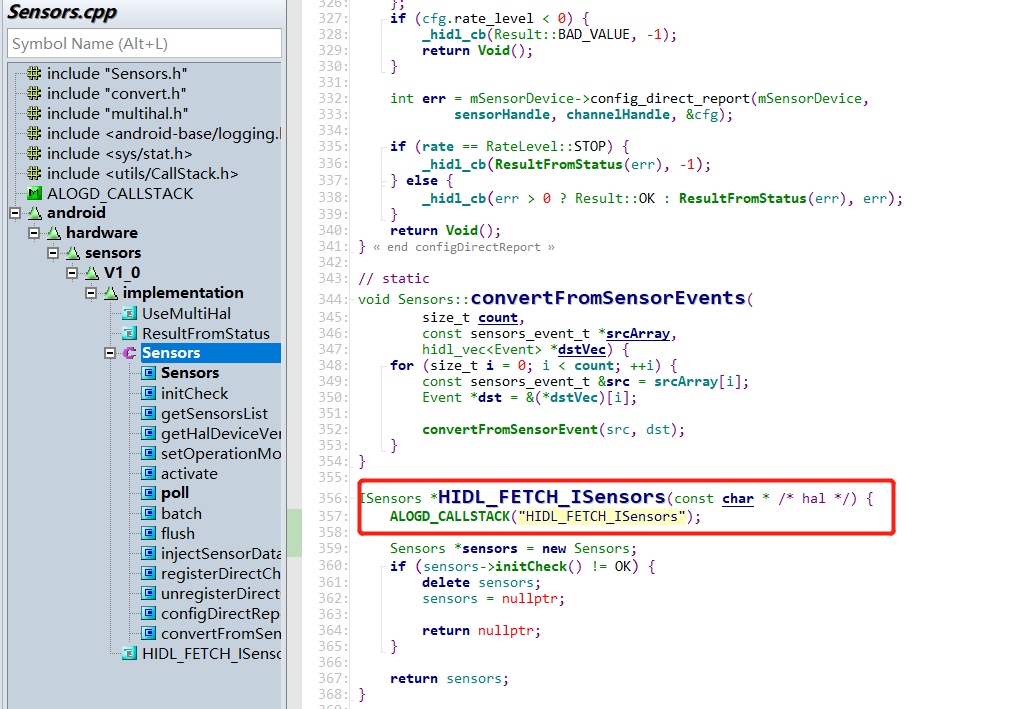
00000000000098b4 HIDL_FETCH_ISensors+80 hardware/interfaces/sensors/1.0/default/Sensors.cpp:357
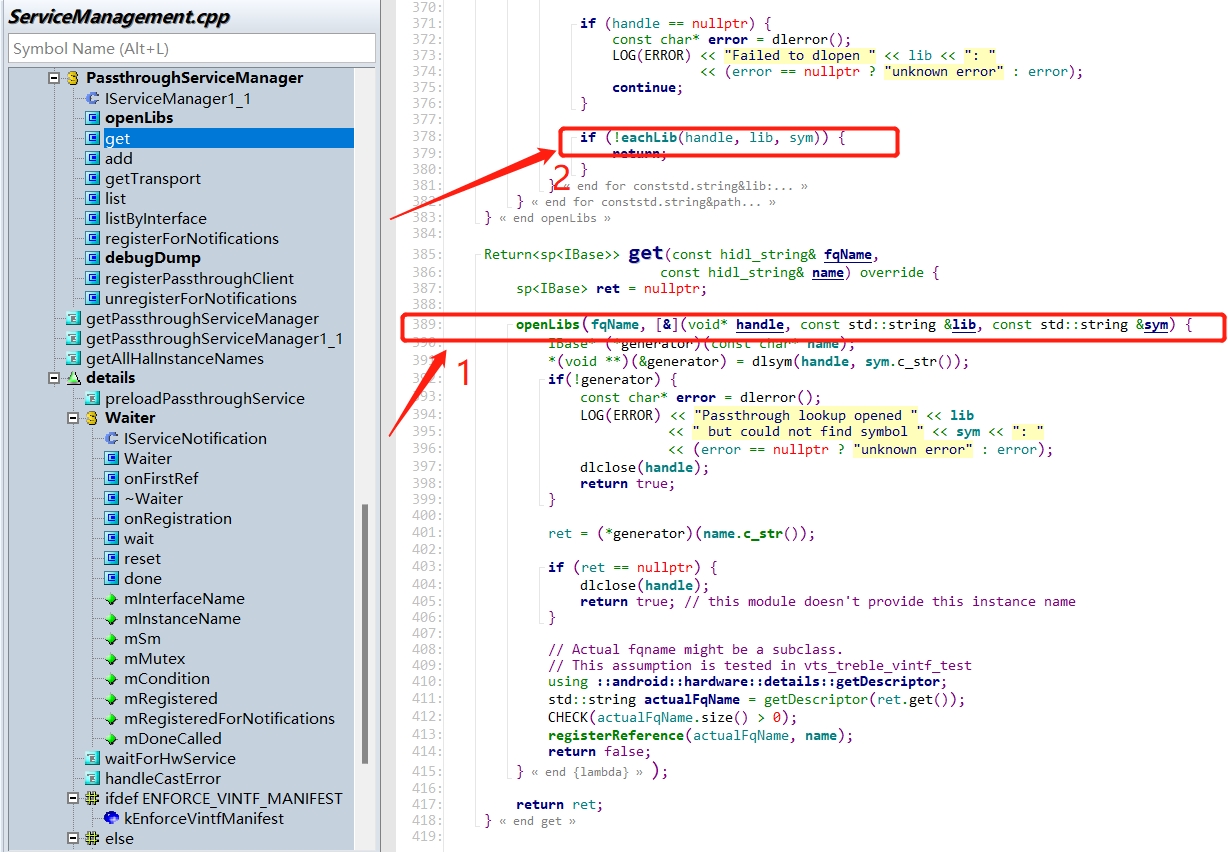
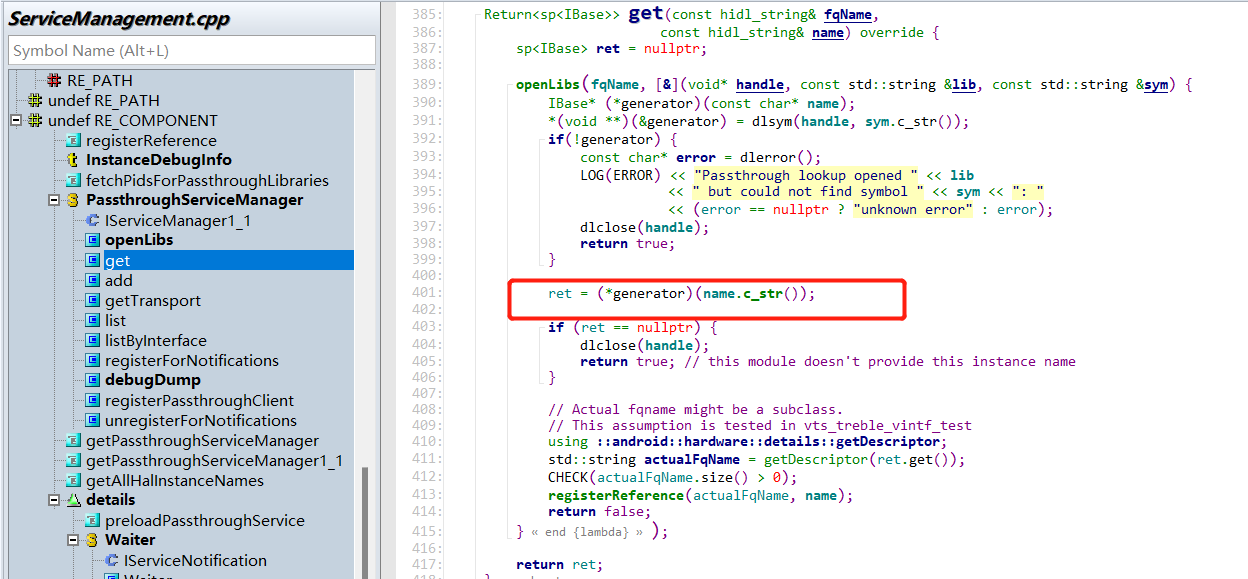
00000000000604dc android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)::{lambda(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)#1}::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const+96 system/libhidl/transport/ServiceManagement.cpp:401
v--------------> std::__1::__function::__value_func<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>::operator()(void*&&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const external/libcxx/include/functional:1799
v--------------> std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const external/libcxx/include/functional:2347
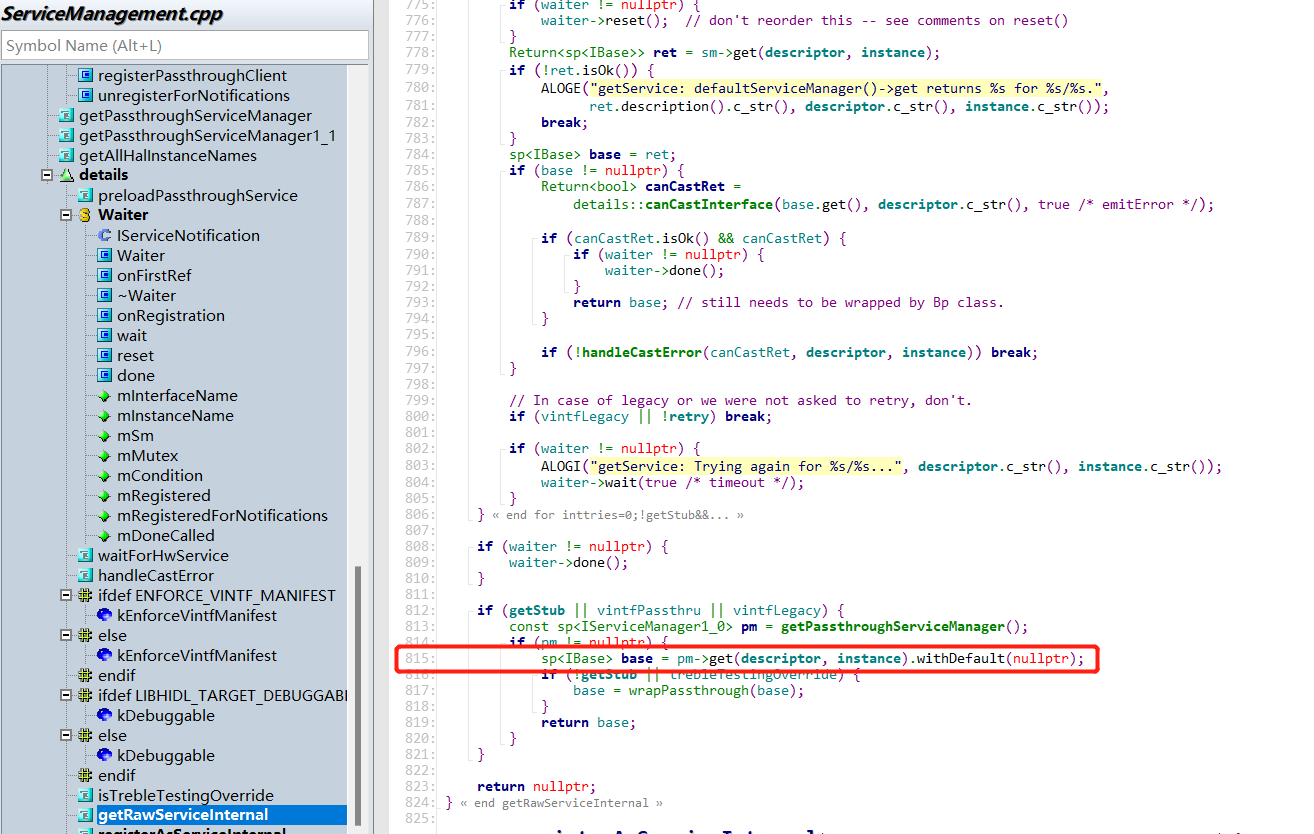
000000000005b904 android::hardware::PassthroughServiceManager::openLibs(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)> const&)+948 system/libhidl/transport/ServiceManagement.cpp:378
000000000005e9e8 android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)+92 system/libhidl/transport/ServiceManagement.cpp:389
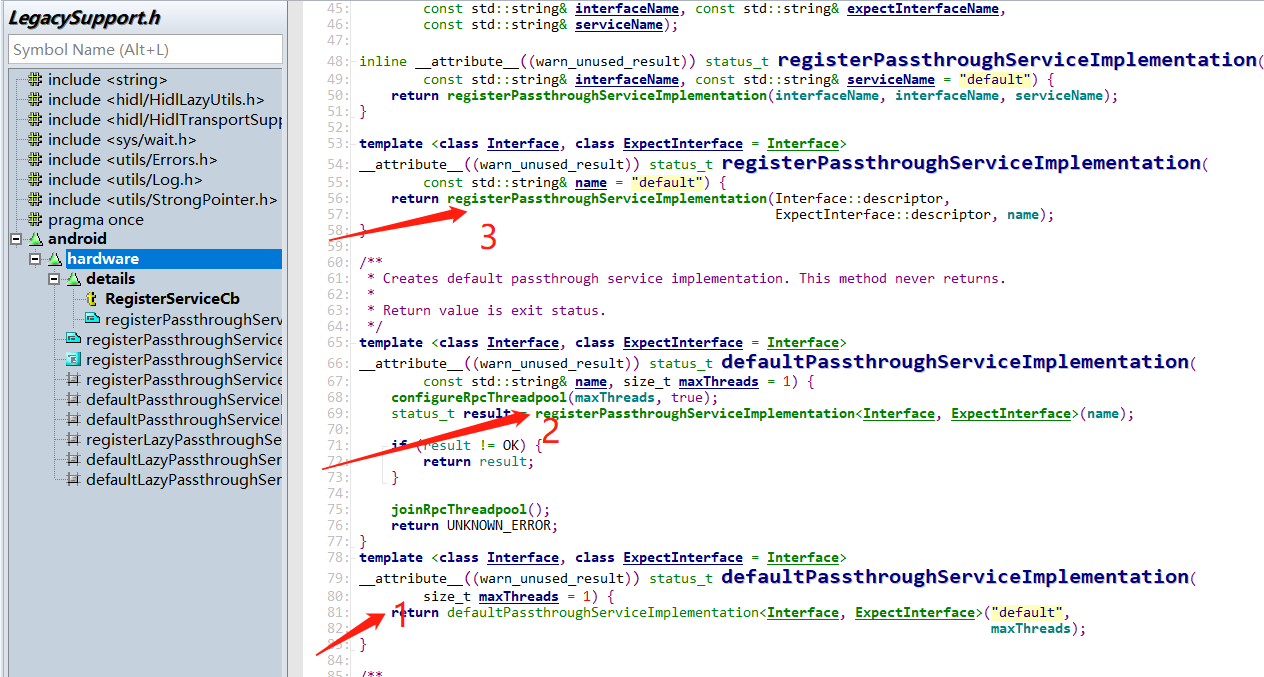
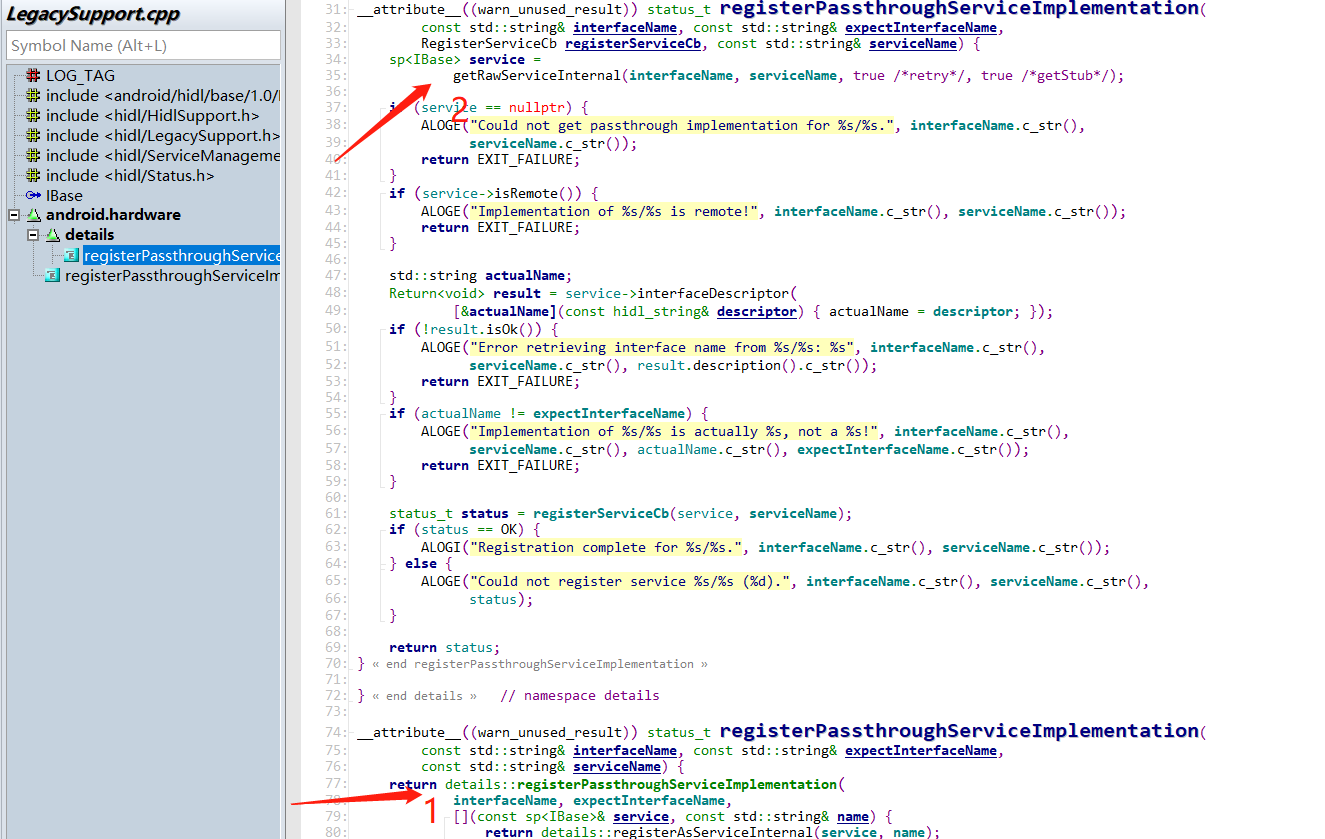
000000000005ca20 android::hardware::details::getRawServiceInternal(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, bool, bool)+1600 system/libhidl/transport/ServiceManagement.cpp:815
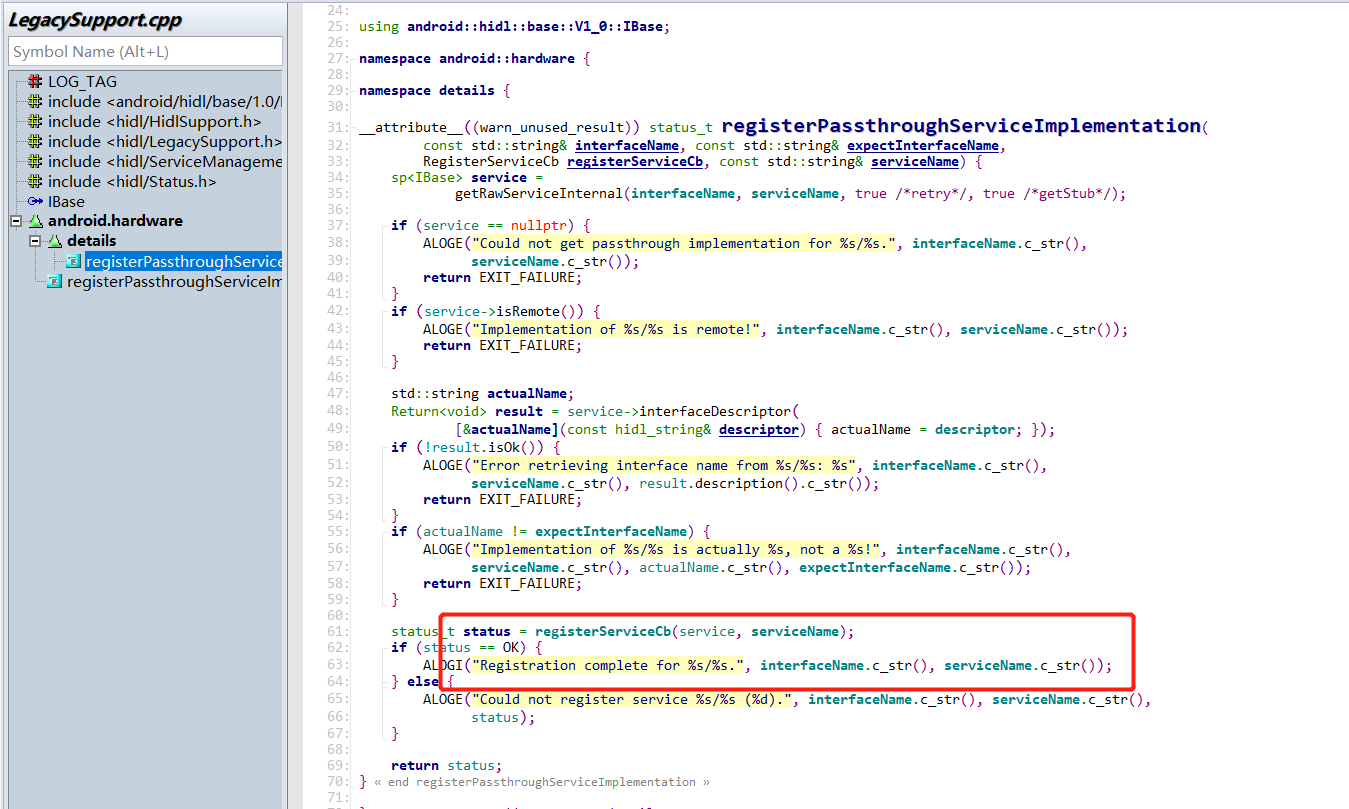
000000000005a560 android::hardware::details::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<int (android::sp<android::hidl::base::V1_0::IBase> const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80 system/libhidl/transport/LegacySupport.cpp:35
000000000005a8e0 android::hardware::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+56 system/libhidl/transport/LegacySupport.cpp:77
00000000000011dc int android::hardware::registerPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80 system/libhidl/transport/include/hidl/LegacySupport.h:56
v--------------> int android::hardware::defaultPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, unsigned long) system/libhidl/transport/include/hidl/LegacySupport.h:69
v--------------> int android::hardware::defaultPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(unsigned long) system/libhidl/transport/include/hidl/LegacySupport.h:81
000000000000109c main+84 hardware/interfaces/sensors/1.0/default/service.cpp:30
00000000000499fc __libc_init+108 bionic/libc/bionic/libc_init_dynamic.cpp:151
Z:\newcc\lagvm\lagvm\LINUX\android\system\libhidl\transport\include\hidl\LegacySupport.h
Z:\newcc\lagvm\lagvm\LINUX\android\system\libhidl\transport\LegacySupport.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\system\libhidl\transport\ServiceManagement.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\system\libhidl\transport\ServiceManagement.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\system\libhidl\transport\ServiceManagement.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\interfaces\sensors\1.0\default\Sensors.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\interfaces\sensors\1.0\default\Sensors.cpp
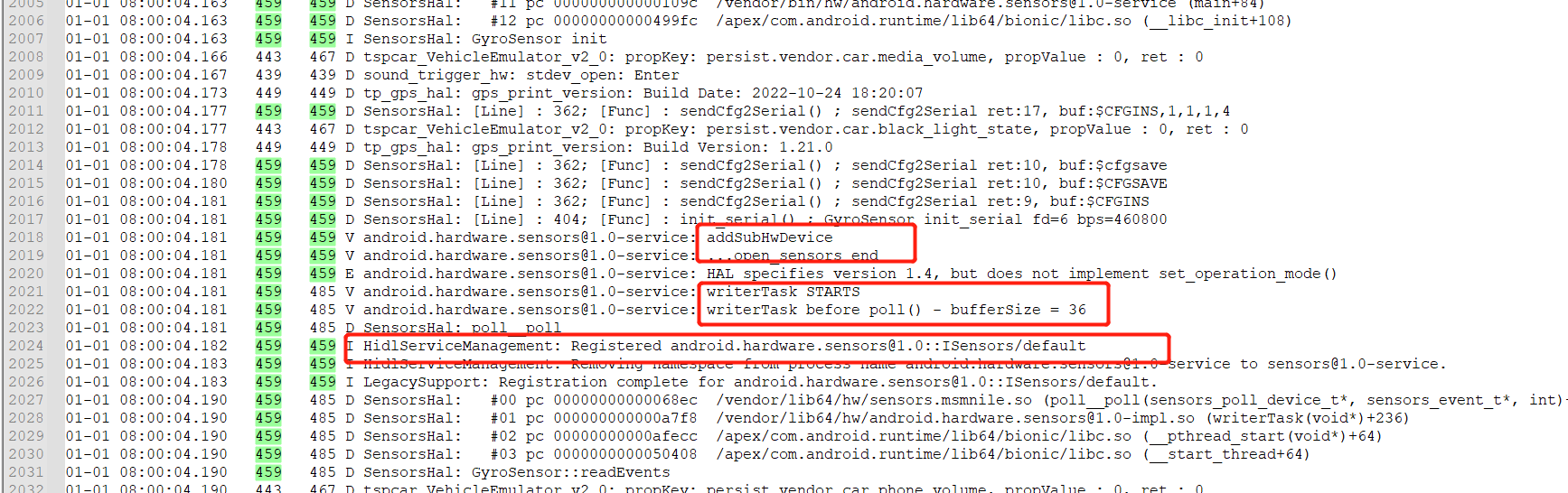
01-01 08:00:04.163 459 459 D SensorsHal: #00 pc 00000000000064d4 /vendor/lib64/hw/sensors.msmnile.so (init_nusensors+128)
01-01 08:00:04.163 459 459 D SensorsHal: #01 pc 000000000000c768 /vendor/lib64/hw/android.hardware.sensors@1.0-impl.so (open_sensors(hw_module_t const*, char const*, hw_device_t**)+400)
01-01 08:00:04.163 459 459 D SensorsHal: #02 pc 000000000000865c /vendor/lib64/hw/android.hardware.sensors@1.0-impl.so (android::hardware::sensors::V1_0::implementation::Sensors::Sensors()+388)
01-01 08:00:04.163 459 459 D SensorsHal: #03 pc 00000000000098e4 /vendor/lib64/hw/android.hardware.sensors@1.0-impl.so (HIDL_FETCH_ISensors+128)
01-01 08:00:04.163 459 459 D SensorsHal: #04 pc 00000000000604dc /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)::'lambda'(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const+96)
01-01 08:00:04.163 459 459 D SensorsHal: #05 pc 000000000005b904 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::openLibs(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)> const&)+948)
01-01 08:00:04.163 459 459 D SensorsHal: #06 pc 000000000005e9e8 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)+92)
01-01 08:00:04.163 459 459 D SensorsHal: #07 pc 000000000005ca20 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::details::getRawServiceInternal(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, bool, bool)+1600)
01-01 08:00:04.163 459 459 D SensorsHal: #08 pc 000000000005a560 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::details::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<int (android::sp<android::hidl::base::V1_0::IBase> const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80)
01-01 08:00:04.163 459 459 D SensorsHal: #09 pc 000000000005a8e0 /apex/com.android.vndk.v30/lib64/libhidlbase.so (android::hardware::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+56)
01-01 08:00:04.163 459 459 D SensorsHal: #10 pc 00000000000011dc /vendor/bin/hw/android.hardware.sensors@1.0-service
01-01 08:00:04.163 459 459 D SensorsHal: #11 pc 000000000000109c /vendor/bin/hw/android.hardware.sensors@1.0-service (main+84)
01-01 08:00:04.163 459 459 D SensorsHal: #12 pc 00000000000499fc /apex/com.android.runtime/lib64/bionic/libc.so (__libc_init+108)
Stack Trace:
RELADDR FUNCTION FILE:LINE
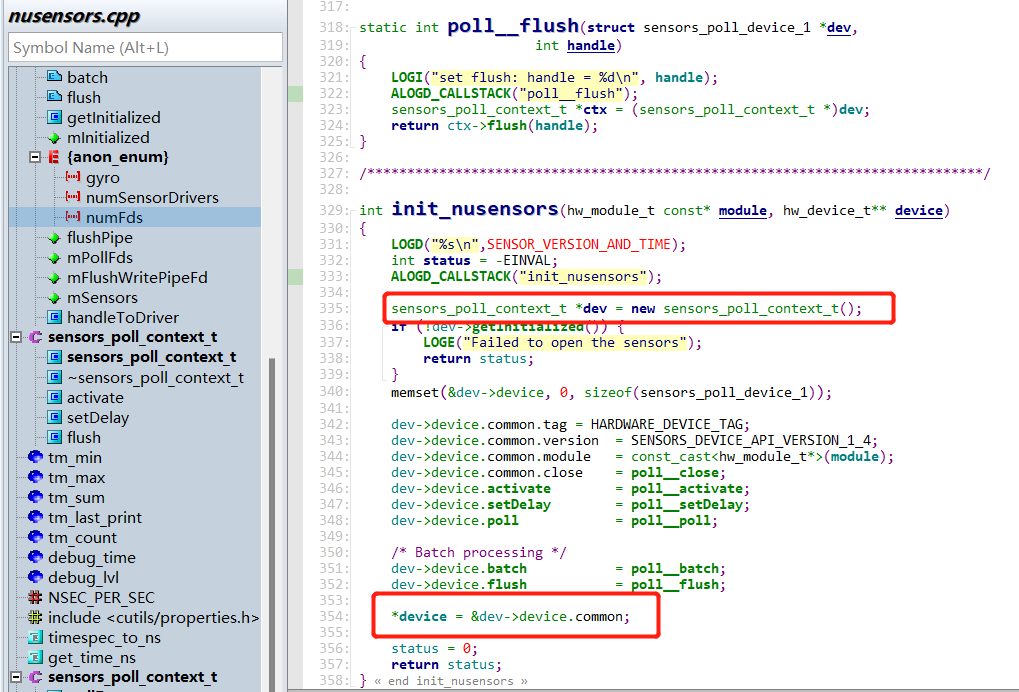
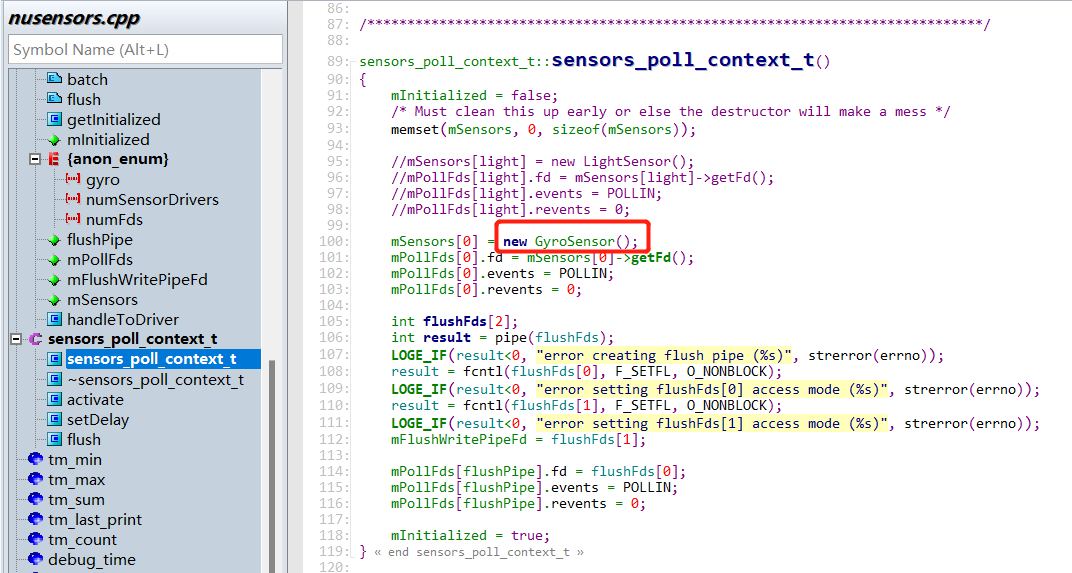
00000000000064d4 init_nusensors+128 hardware/omosoft/sensor/sensors_omo/nusensors.cpp:333
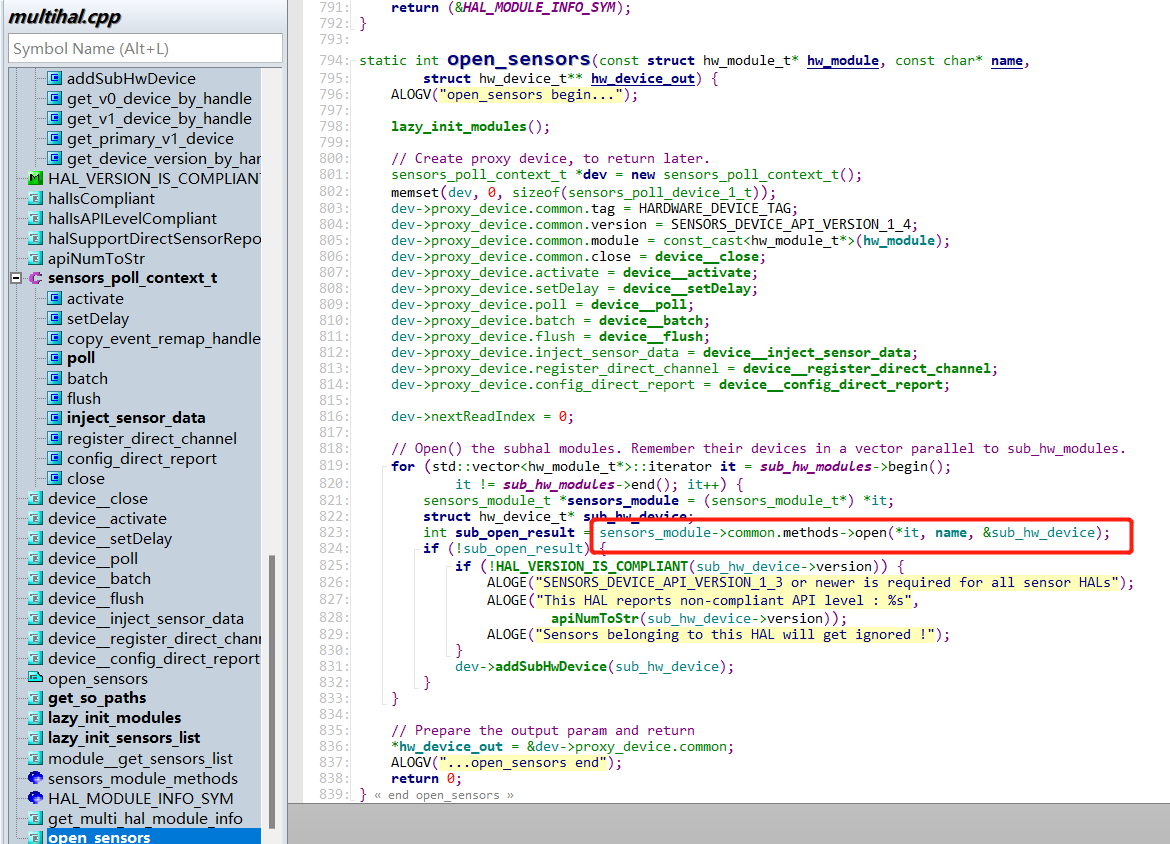
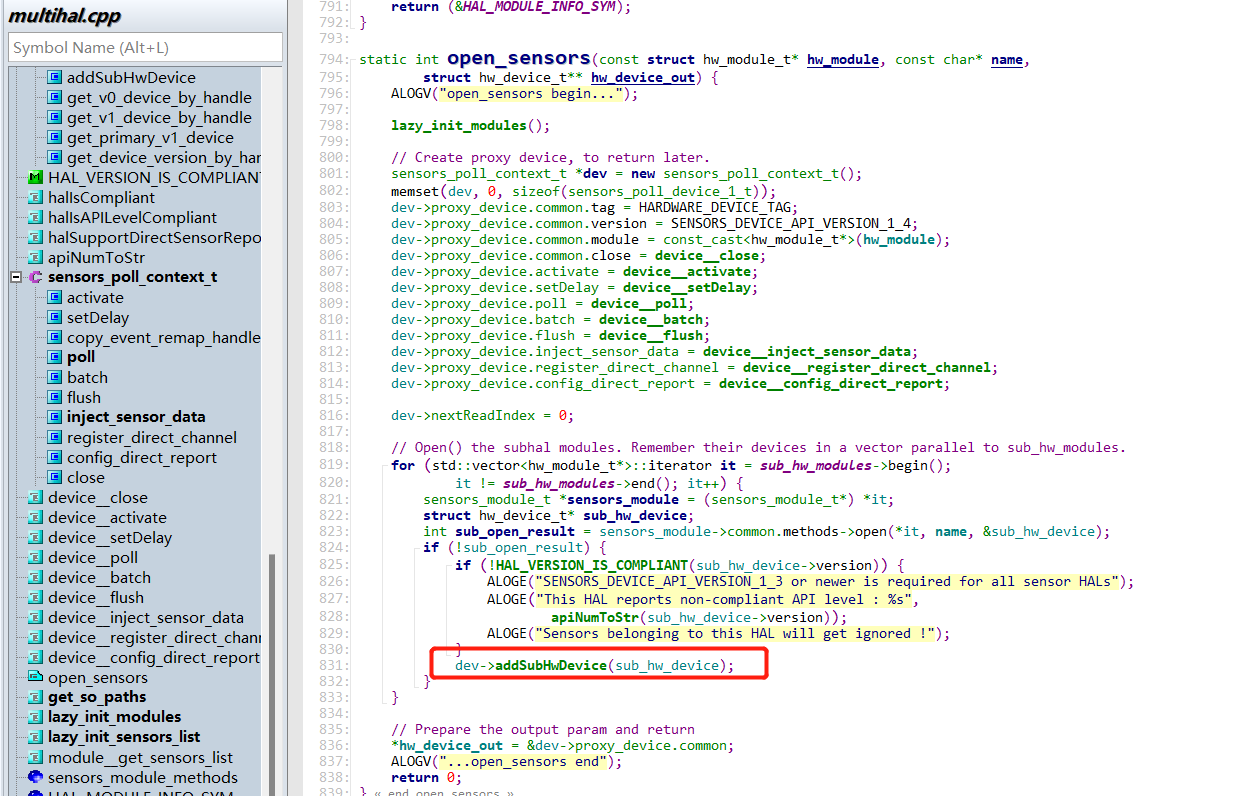
000000000000c768 open_sensors(hw_module_t const*, char const*, hw_device_t**)+400 hardware/libhardware/modules/sensors/multihal.cpp:823
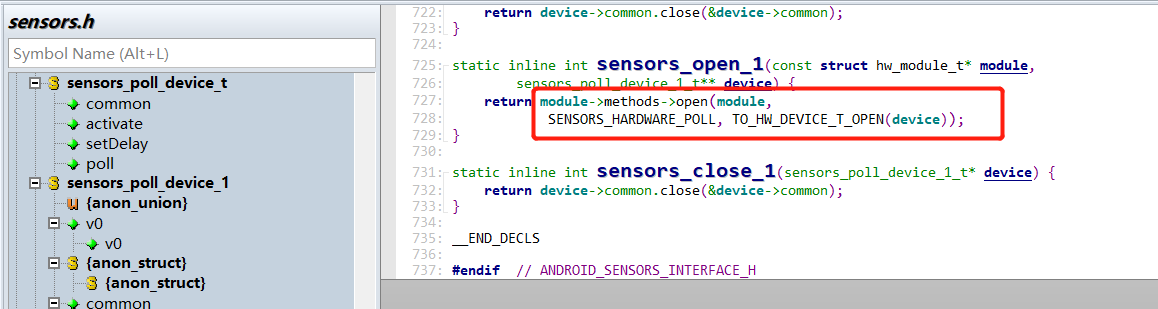
v--------------> sensors_open_1(hw_module_t const*, sensors_poll_device_1**) hardware/libhardware/include/hardware/sensors.h:727
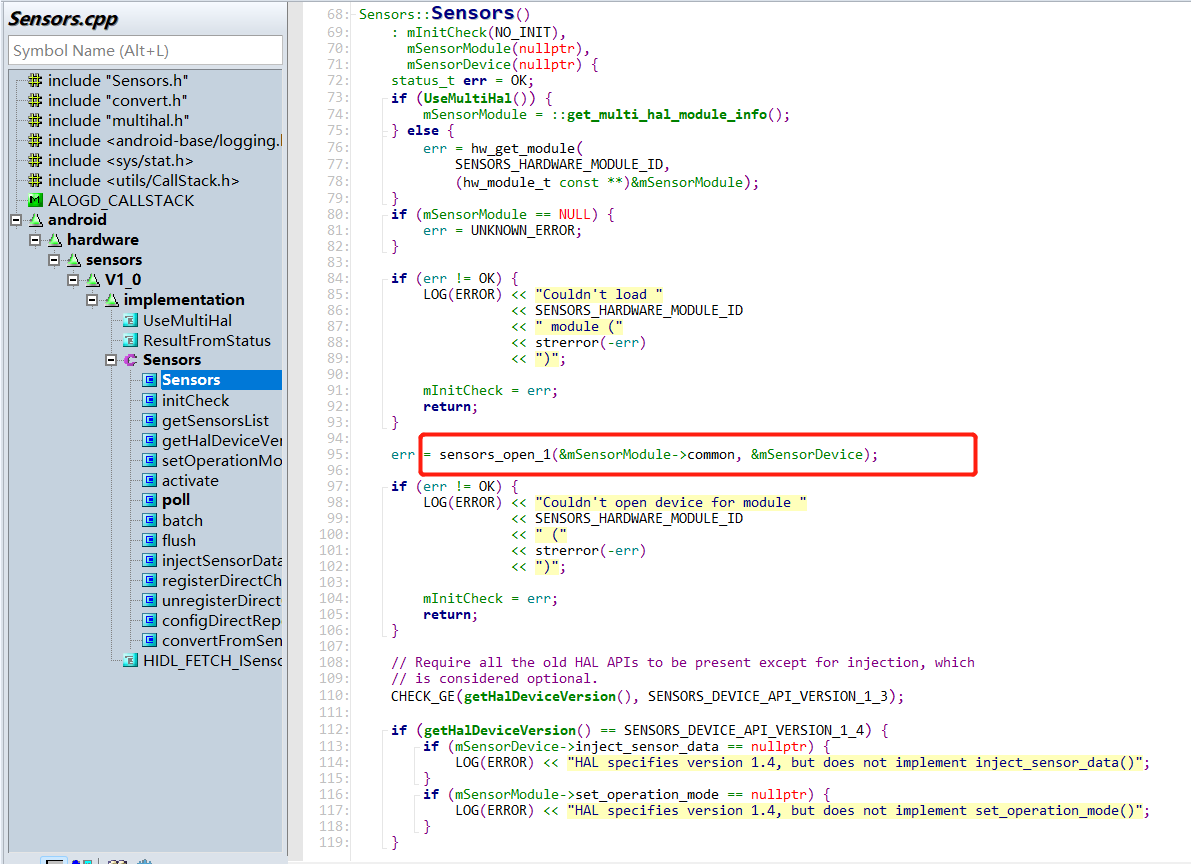
000000000000865c android::hardware::sensors::V1_0::implementation::Sensors::Sensors()+388 hardware/interfaces/sensors/1.0/default/Sensors.cpp:95
00000000000098e4 HIDL_FETCH_ISensors+128 hardware/interfaces/sensors/1.0/default/Sensors.cpp:359
00000000000604dc android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)::{lambda(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)#1}::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const+96 system/libhidl/transport/ServiceManagement.cpp:401
v--------------> std::__1::__function::__value_func<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>::operator()(void*&&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const external/libcxx/include/functional:1799
v--------------> std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>::operator()(void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&) const external/libcxx/include/functional:2347
000000000005b904 android::hardware::PassthroughServiceManager::openLibs(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<bool (void*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)> const&)+948 system/libhidl/transport/ServiceManagement.cpp:378
000000000005e9e8 android::hardware::PassthroughServiceManager::get(android::hardware::hidl_string const&, android::hardware::hidl_string const&)+92 system/libhidl/transport/ServiceManagement.cpp:389
000000000005ca20 android::hardware::details::getRawServiceInternal(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, bool, bool)+1600 system/libhidl/transport/ServiceManagement.cpp:815
000000000005a560 android::hardware::details::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::function<int (android::sp<android::hidl::base::V1_0::IBase> const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)>, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80 system/libhidl/transport/LegacySupport.cpp:35
000000000005a8e0 android::hardware::registerPassthroughServiceImplementation(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+56 system/libhidl/transport/LegacySupport.cpp:77
00000000000011dc int android::hardware::registerPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&)+80 system/libhidl/transport/include/hidl/LegacySupport.h:56
v--------------> int android::hardware::defaultPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> > const&, unsigned long) system/libhidl/transport/include/hidl/LegacySupport.h:69
v--------------> int android::hardware::defaultPassthroughServiceImplementation<android::hardware::sensors::V1_0::ISensors, android::hardware::sensors::V1_0::ISensors>(unsigned long) system/libhidl/transport/include/hidl/LegacySupport.h:81
000000000000109c main+84 hardware/interfaces/sensors/1.0/default/service.cpp:30
00000000000499fc __libc_init+108 bionic/libc/bionic/libc_init_dynamic.cpp:151
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\libhardware\include\hardware\sensors.h
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\libhardware\modules\sensors\multihal.cpp
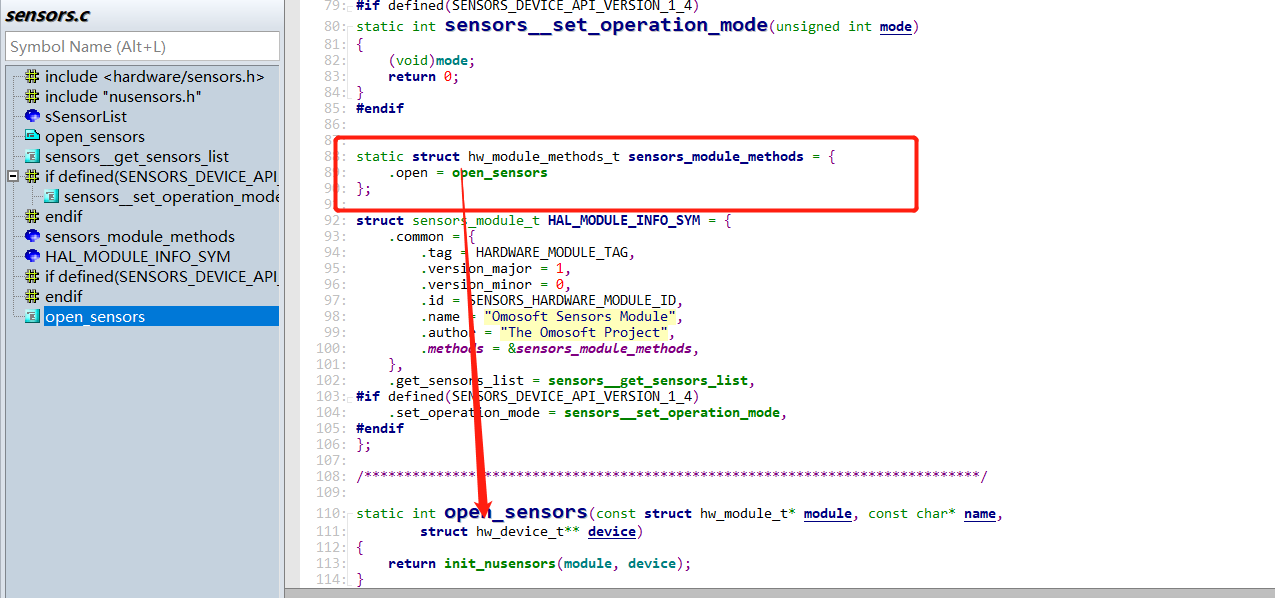
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\omosoft\sensor\sensors_omo\sensors.c
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\xxxsoft\sensor\sensors_xxx\nusensor.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\xxxsoft\sensor\sensors_xxx\nusensor.cpp
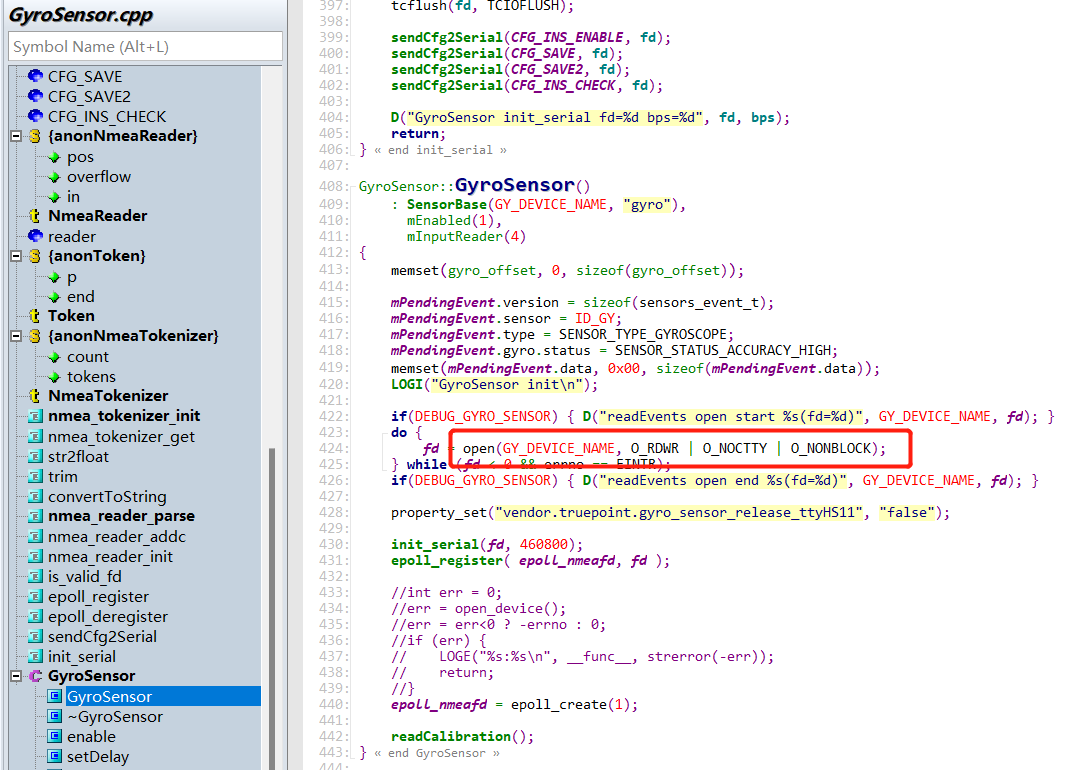
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\xxxsoft\sensor\sensors_xxx\GyroSensor.cpp
Stack Trace:
RELADDR FUNCTION FILE:LINE
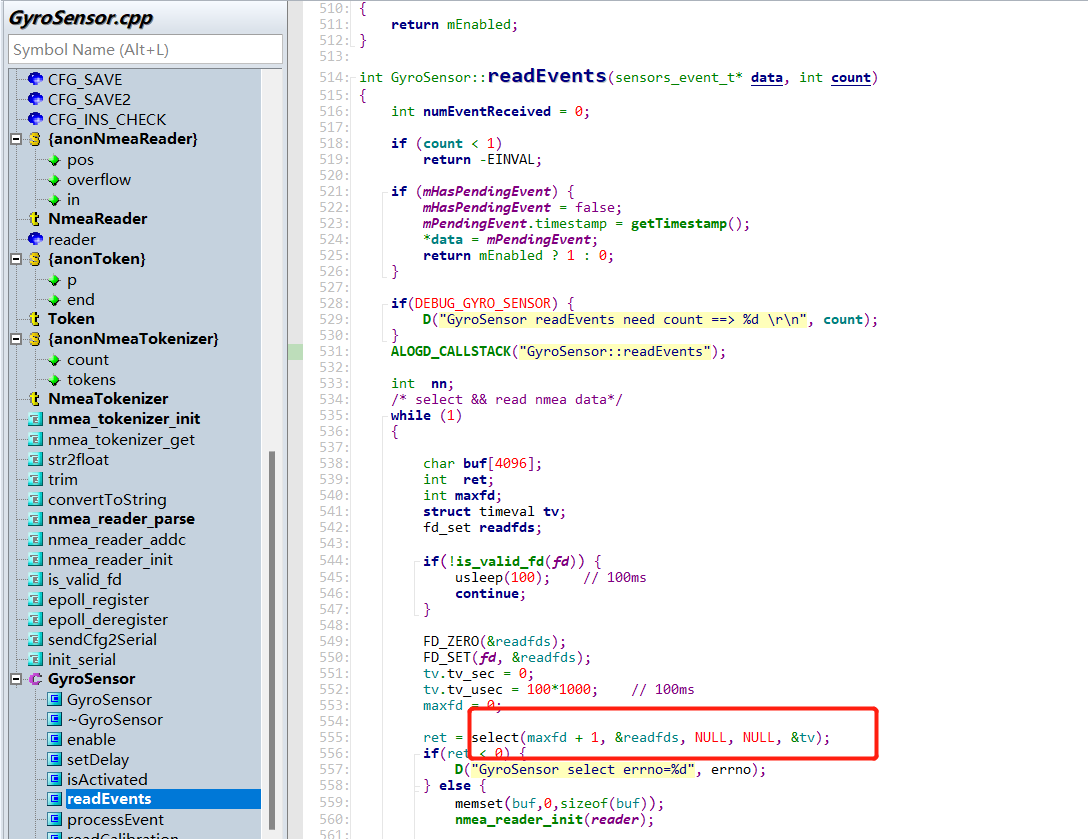
0000000000008c70 GyroSensor::readEvents(sensors_event_t*, int)+132 hardware/omosoft/sensor/sensors_omo/GyroSensor.cpp:531
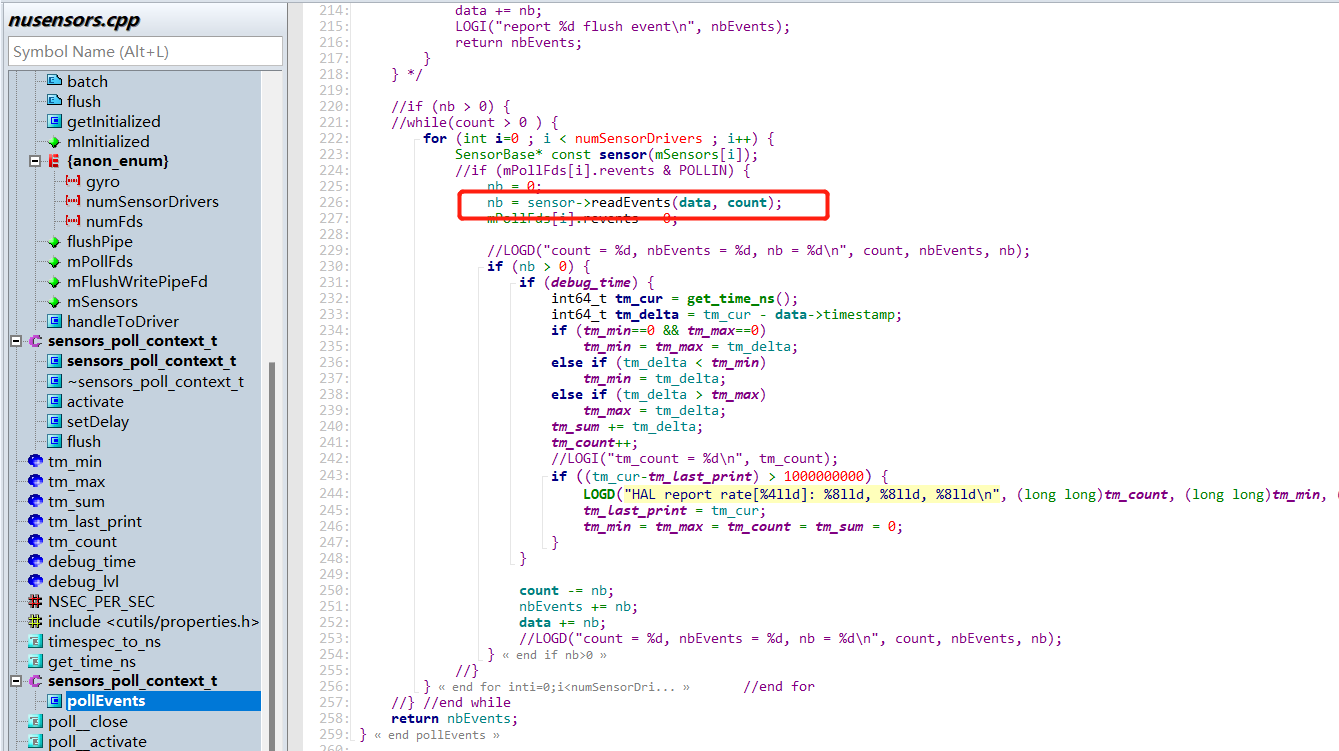
0000000000006304 sensors_poll_context_t::pollEvents(sensors_event_t*, int)+64 hardware/omosoft/sensor/sensors_omo/nusensors.cpp:226
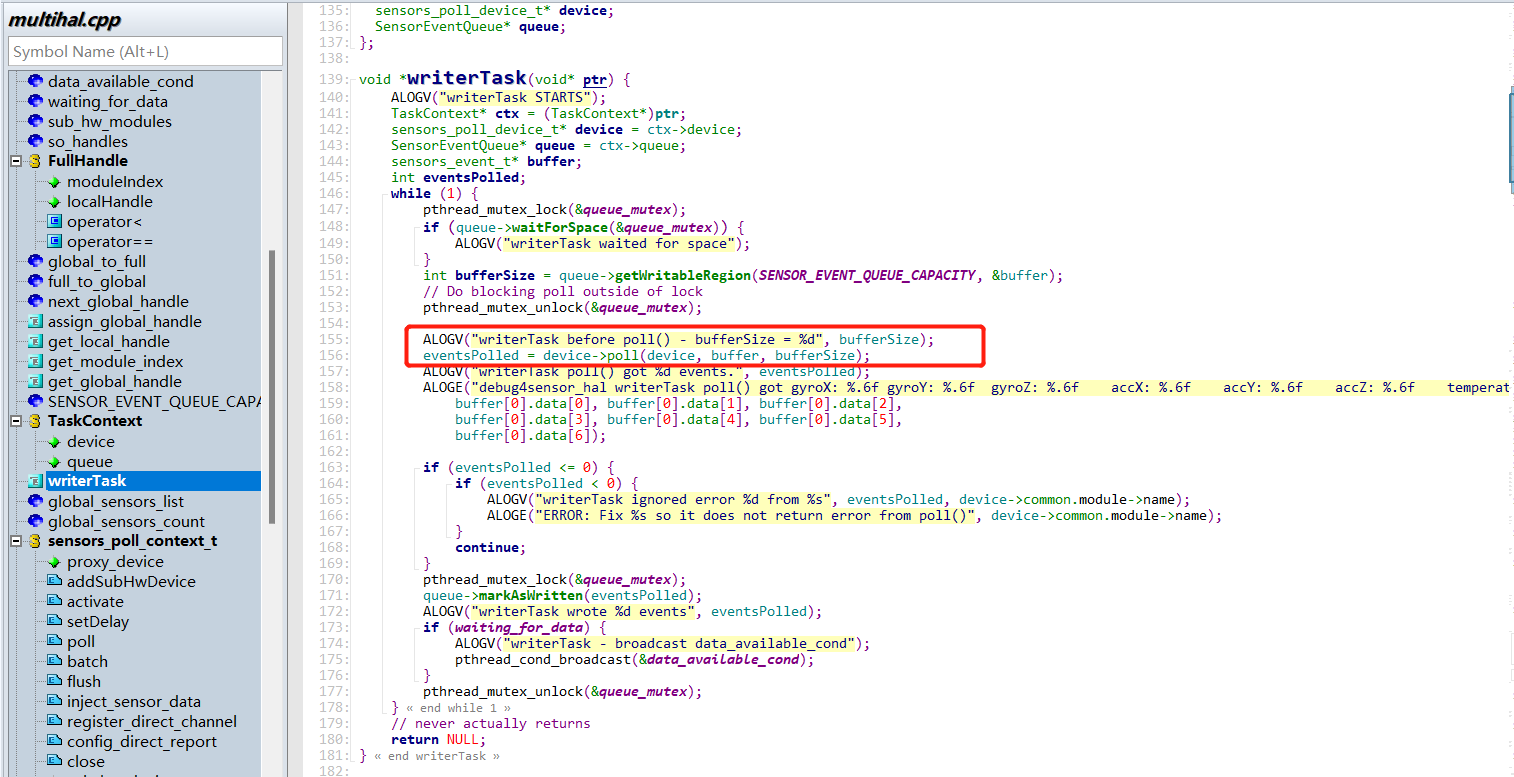
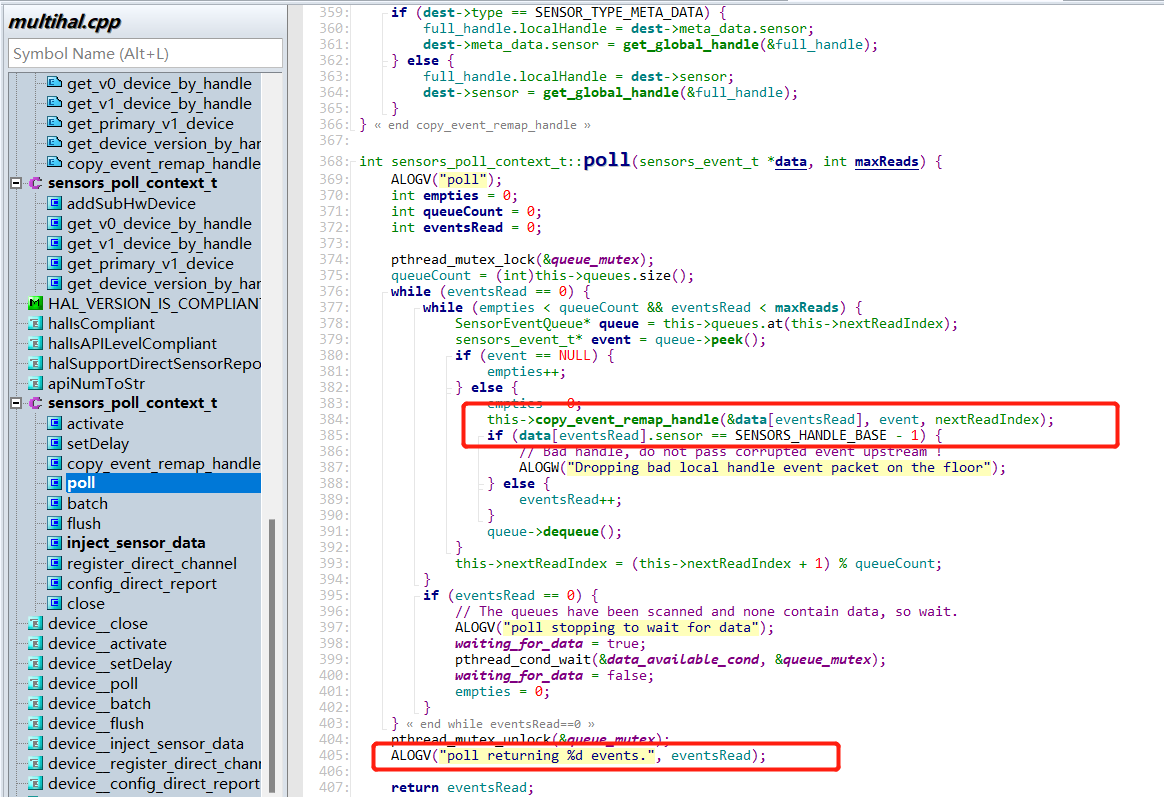
000000000000691c poll__poll(sensors_poll_device_t*, sensors_event_t*, int)+156 hardware/omosoft/sensor/sensors_omo/nusensors.cpp:305
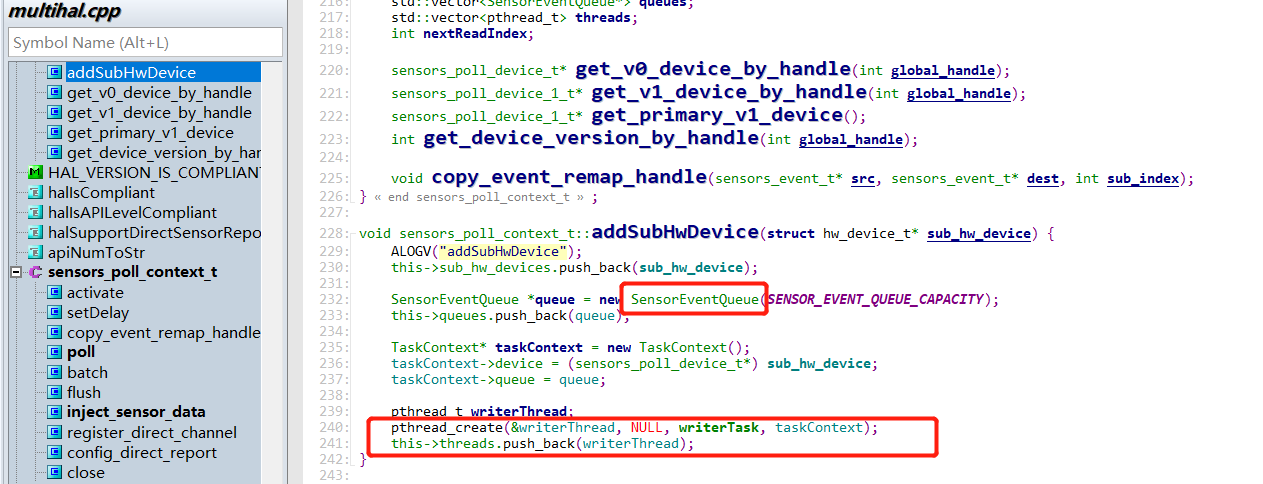
000000000000a7f8 writerTask(void*)+236 hardware/libhardware/modules/sensors/multihal.cpp:156
00000000000afecc __pthread_start(void*)+64 bionic/libc/bionic/pthread_create.cpp:347
0000000000050408 __start_thread+64 bionic/libc/bionic/clone.cpp:53
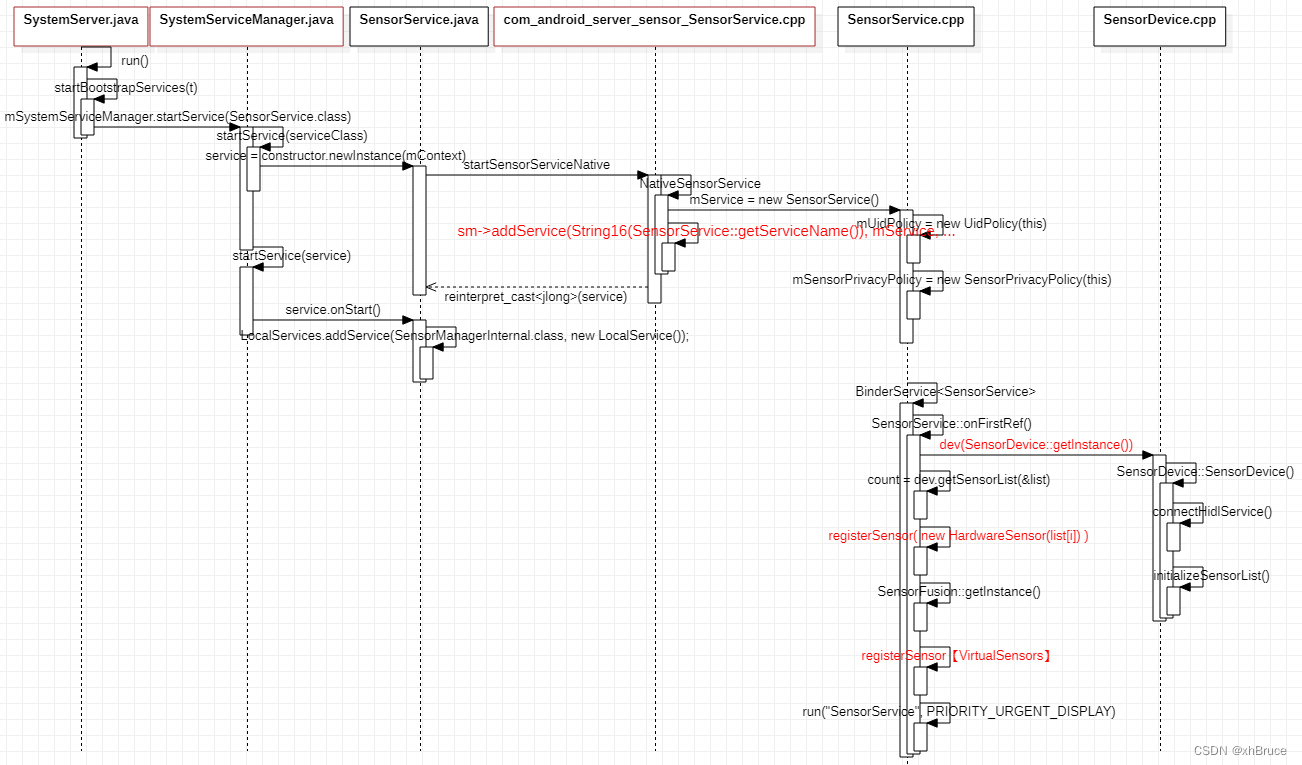
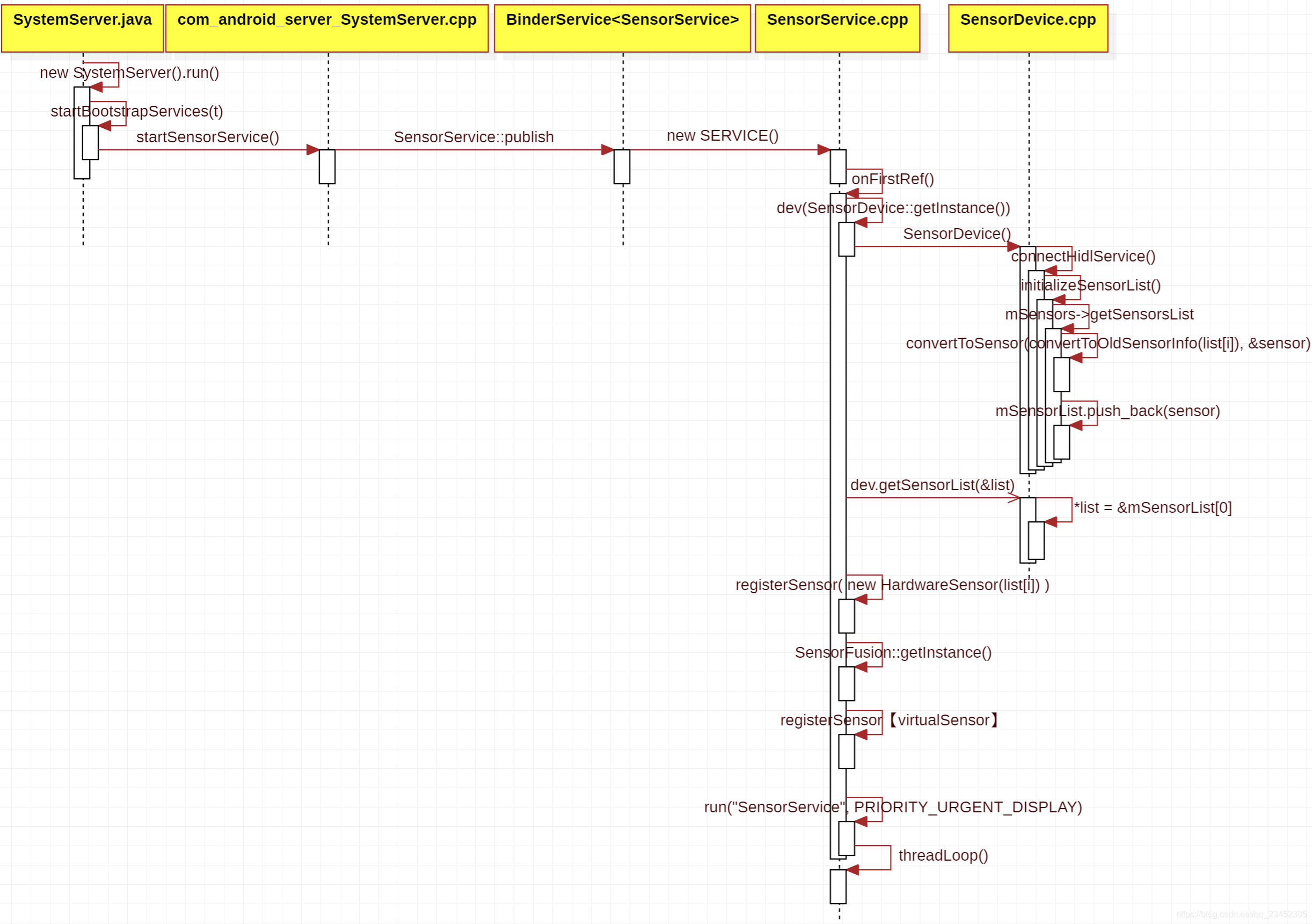
SensorService继承 frameworks/native/services/sensorservice/SensorService.h
继承BinderService、BnSensorServer、Thread
class SensorService :
public BinderService<SensorService>,
public BnSensorServer,
protected Thread1、BinderService:frameworks/native/libs/binder/include/binder/BinderService.h BinderService 是 Android Service 框架的主要类,是个模板类,它提供了 Service 的生命周期管理、进程间通信、请求响应处理等功能。Android 中的绝大部分 Service 都会继承此类。 new SERVICE():new一个SensorService,然后 以 “sensorservice”为key,把sensorservice实例加入到ServiceManaer 2、BnSensorServer:frameworks/native/libs/sensor/include/sensor/ISensorServer.h 和 BinderService 主要实现IPC跨进程通信,实际继承BnInterface: frameworks/native/libs/binder/include/binder/IInterface.h 3、Thread:继承 Thread 启动 threadLoop
SensorService 创建 onFirstRef 当 SensorService 第一个实例创建时,其 onFirstRef 接口将会被调用
① 在 SensorDevice 的构造函数中,会调用 hw_get_module 接口加载 Sensor HAL 的动态库 ② 通过 SensorDevice,调用 Sensor HAL 提供的 get_sensors_list 接口,获取所支持的 Sensor 信息获,调用registerSensor函数把Sensor保存起来 ③ SensorFusion功能,传感融合。它的主要作用就是,按照一定的算法计算系统的多个传感器对某一个值的上报的数据,得到更准确的值。 ④ registerVirtualSensor注册虚拟传感器:这些虚拟的传感器步会产生真的数据,而是通过SensorFusion功能计算得到的值,作为虚拟传感的数据。分发过程中会有分析到。 ⑤ 初始化一些Buffer,用他们保存sensor硬件上报的数据 ⑥ 创建一个 Looper 和 SensorEventAckReceiver。其中 Looper 用于 enable sensor 后,进行数据的接收;而 SensorEventAckReceiver 则用于在 dispatch wake up sensor event 给上层后,接收上层返回的确认 ACK。 ⑦ SensorService 不仅是一个服务,而且他还是一个线程,初始化工作的最后就是启动该线程执行threadLoop函数。threadLoop函数主要的工作就是,循环读取sensor硬件上传上来的数据,然后分发给应用。
void SensorService::onFirstRef() {
// ① 在 SensorDevice 的构造函数中,会调用 hw_get_module 接口加载 Sensor HAL 的动态库
SensorDevice& dev(SensorDevice::getInstance());
//.......
if (dev.initCheck() == NO_ERROR) {
// ② 通过 SensorDevice,调用 Sensor HAL 提供的 get_sensors_list 接口,获取所支持的 Sensor 信息获,调用registerSensor函数把Sensor保存起来
sensor_t const* list;
ssize_t count = dev.getSensorList(&list);
//.......
for (ssize_t i=0 ; i<count ; i++) {
//.......
if (useThisSensor) {
registerSensor( new HardwareSensor(list[i]) );
}
}
// ③ SensorFusion功能,传感融合。它的主要作用就是,按照一定的算法计算系统的多个传感器对某一个值的上报的数据,得到更准确的值。
// it's safe to instantiate the SensorFusion object here
// (it wants to be instantiated after h/w sensors have been
// registered)
SensorFusion::getInstance();
// ④ 注册虚拟传感器:这些虚拟的传感器步会产生真的数据,而是通过SensorFusion功能计算得到的值,作为虚拟传感的数据。
//.......
registerSensor(new RotationVectorSensor(), !needRotationVector, true);
registerSensor(new OrientationSensor(), !needRotationVector, true);
registerSensor(new LinearAccelerationSensor(list, count),
!needLinearAcceleration, true);
registerSensor( new CorrectedGyroSensor(list, count), true, true);
registerSensor( new GyroDriftSensor(), true, true);
//.......
registerSensor(new GravitySensor(list, count), !needGravitySensor, true);
//.......
registerSensor(new GameRotationVectorSensor(), !needGameRotationVector, true);
//.......
registerSensor(new GeoMagRotationVectorSensor(), !needGeoMagRotationVector, true);
//.......
// ⑤ 初始化一些Buffer,用他们保存sensor硬件上报的数据
mLooper = new Looper(false);
const size_t minBufferSize = SensorEventQueue::MAX_RECEIVE_BUFFER_EVENT_COUNT;
mSensorEventBuffer = new sensors_event_t[minBufferSize];
mSensorEventScratch = new sensors_event_t[minBufferSize];
mMapFlushEventsToConnections = new wp<const SensorEventConnection> [minBufferSize];
mCurrentOperatingMode = NORMAL;
//.......
// ⑥ 创建一个 Looper 和 SensorEventAckReceiver。其中 Looper 用于 enable sensor 后,进行数据的接收;而 SensorEventAckReceiver 则用于在 dispatch wake up sensor event 给上层后,接收上层返回的确认 ACK。
mAckReceiver = new SensorEventAckReceiver(this);
mAckReceiver->run("SensorEventAckReceiver", PRIORITY_URGENT_DISPLAY);
// ⑦ SensorService 不仅是一个服务,而且他还是一个线程,初始化工作的最后就是启动该线程执行threadLoop函数。threadLoop函数主要的工作就是,循环读取sensor硬件上传上来的数据,然后分发给应用。
run("SensorService", PRIORITY_URGENT_DISPLAY);
//.......
}
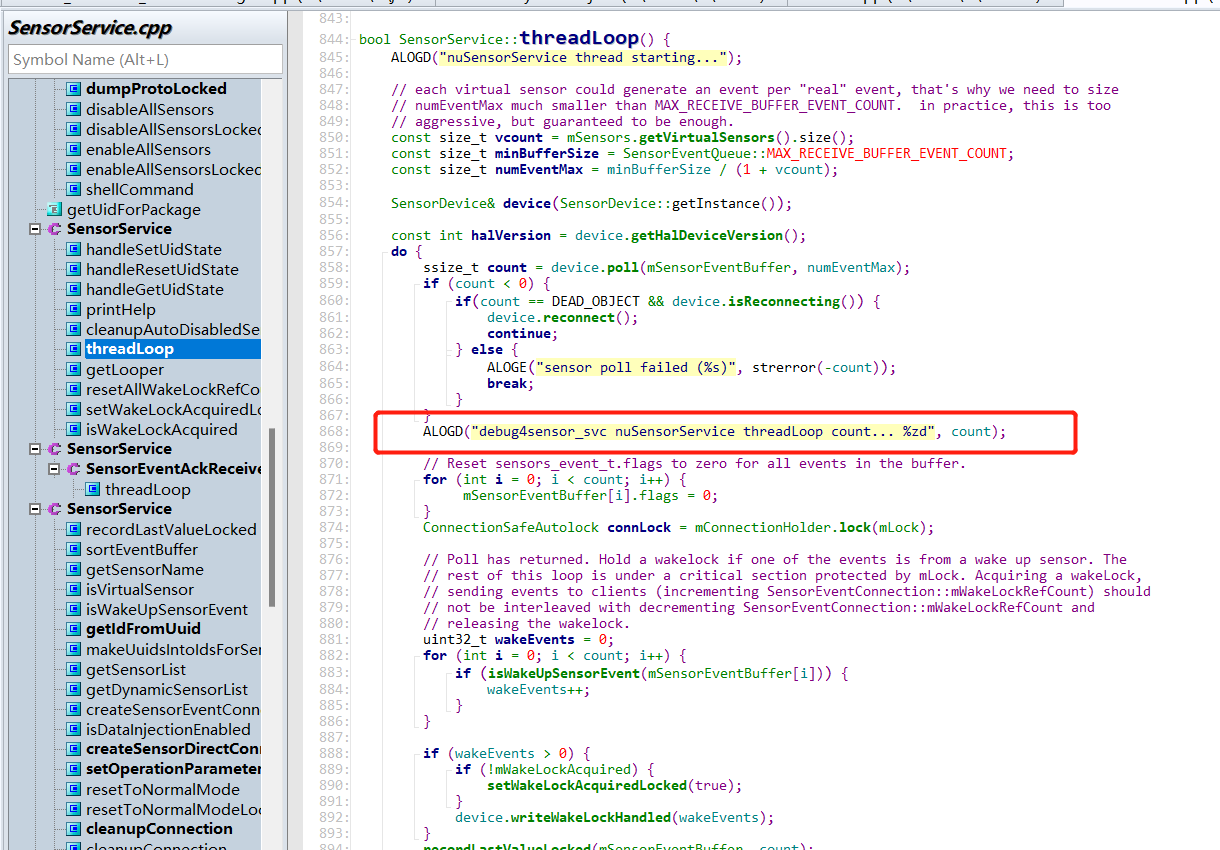
SensorService::threadLoop() 1、通过poll往hal层取sensor数据, 若没有数据的时候就一直阻塞(该阻塞功能由HAL层实现),当有数据时该函数就会返回 2、virtual sensors 相关数据计算后上报 3、通过SensorEventConnection中 sendEvents 将数据给到每个应用,每个应用都有自己的SensorEventConnection
bool SensorService::threadLoop() {
ALOGD("nuSensorService thread starting...");
//.......
SensorDevice& device(SensorDevice::getInstance());
const int halVersion = device.getHalDeviceVersion();
do {
// ① 通过poll往hal层取sensor数据, 若没有数据的时候就一直阻塞(该阻塞功能由HAL层实现),当有数据时该函数就会返回
ssize_t count = device.poll(mSensorEventBuffer, numEventMax);//①
if (count < 0) {
if(count == DEAD_OBJECT && device.isReconnecting()) {
device.reconnect();
continue;
} else {
ALOGE("sensor poll failed (%s)", strerror(-count));
break;
}
}
//.......
// handle virtual sensors
if (count && vcount) {
sensors_event_t const * const event = mSensorEventBuffer;
if (!mActiveVirtualSensors.empty()) {
size_t k = 0;
SensorFusion& fusion(SensorFusion::getInstance());
if (fusion.isEnabled()) {
for (size_t i=0 ; i<size_t(count) ; i++) {
fusion.process(event[i]);
}
}
for (size_t i=0 ; i<size_t(count) && k<minBufferSize ; i++) {
for (int handle : mActiveVirtualSensors) {
if (count + k >= minBufferSize) {
ALOGE("buffer too small to hold all events: "
"count=%zd, k=%zu, size=%zu",
count, k, minBufferSize);
break;
}
sensors_event_t out;
sp<SensorInterface> si = mSensors.getInterface(handle);
if (si == nullptr) {
ALOGE("handle %d is not an valid virtual sensor", handle);
continue;
}
// ② virtual sensors 相关数据计算后上报
if (si->process(&out, event[i])) {
mSensorEventBuffer[count + k] = out;
k++;
}
}
}
if (k) {
// record the last synthesized values
recordLastValueLocked(&mSensorEventBuffer[count], k);
count += k;
// sort the buffer by time-stamps
sortEventBuffer(mSensorEventBuffer, count);
}
}
}
//.......
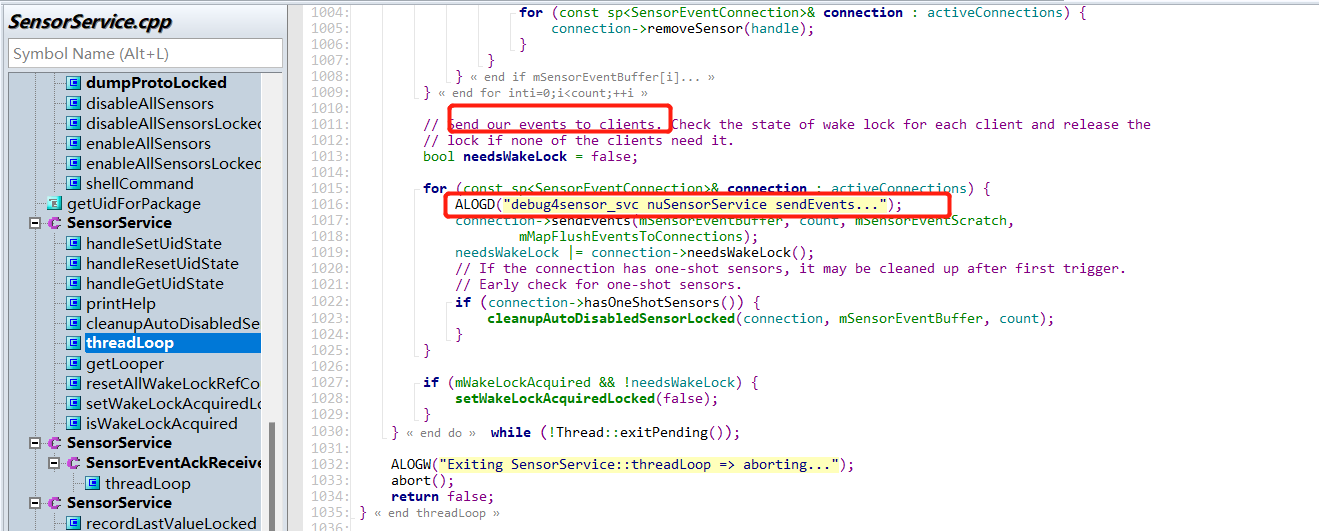
// Send our events to clients. Check the state of wake lock for each client and release the
// lock if none of the clients need it.
bool needsWakeLock = false;
for (const sp<SensorEventConnection>& connection : activeConnections) {
// ② 通过SensorEventConnection 将数据给到每个应用,每个应用都有自己的SensorEventConnection
connection->sendEvents(mSensorEventBuffer, count, mSensorEventScratch,
mMapFlushEventsToConnections); //②
needsWakeLock |= connection->needsWakeLock();
// If the connection has one-shot sensors, it may be cleaned up after first trigger.
// Early check for one-shot sensors.
if (connection->hasOneShotSensors()) {
cleanupAutoDisabledSensorLocked(connection, mSensorEventBuffer, count);
}
}
if (mWakeLockAcquired && !needsWakeLock) {
setWakeLockAcquiredLocked(false);
}
} while (!Thread::exitPending());
ALOGW("Exiting SensorService::threadLoop => aborting...");
abort();
return false;
}


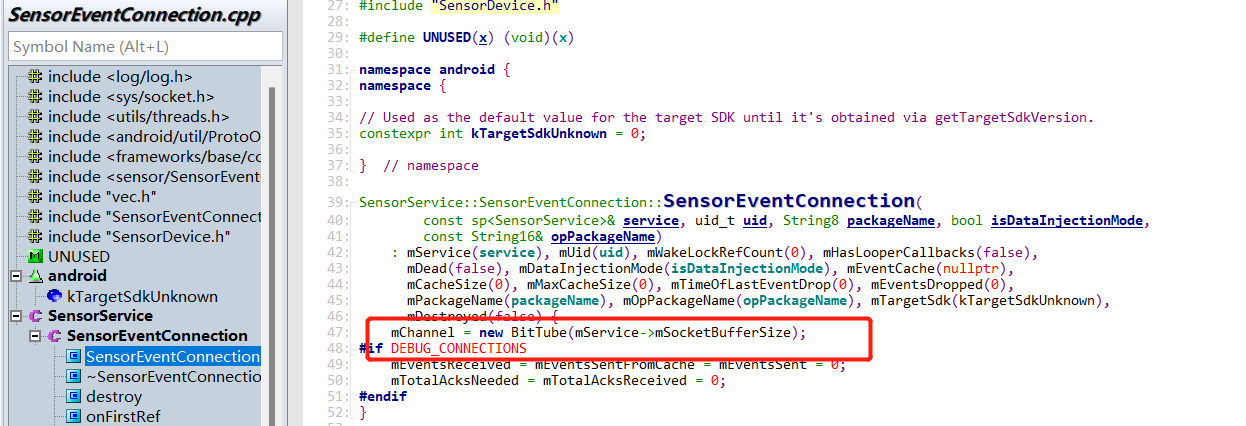
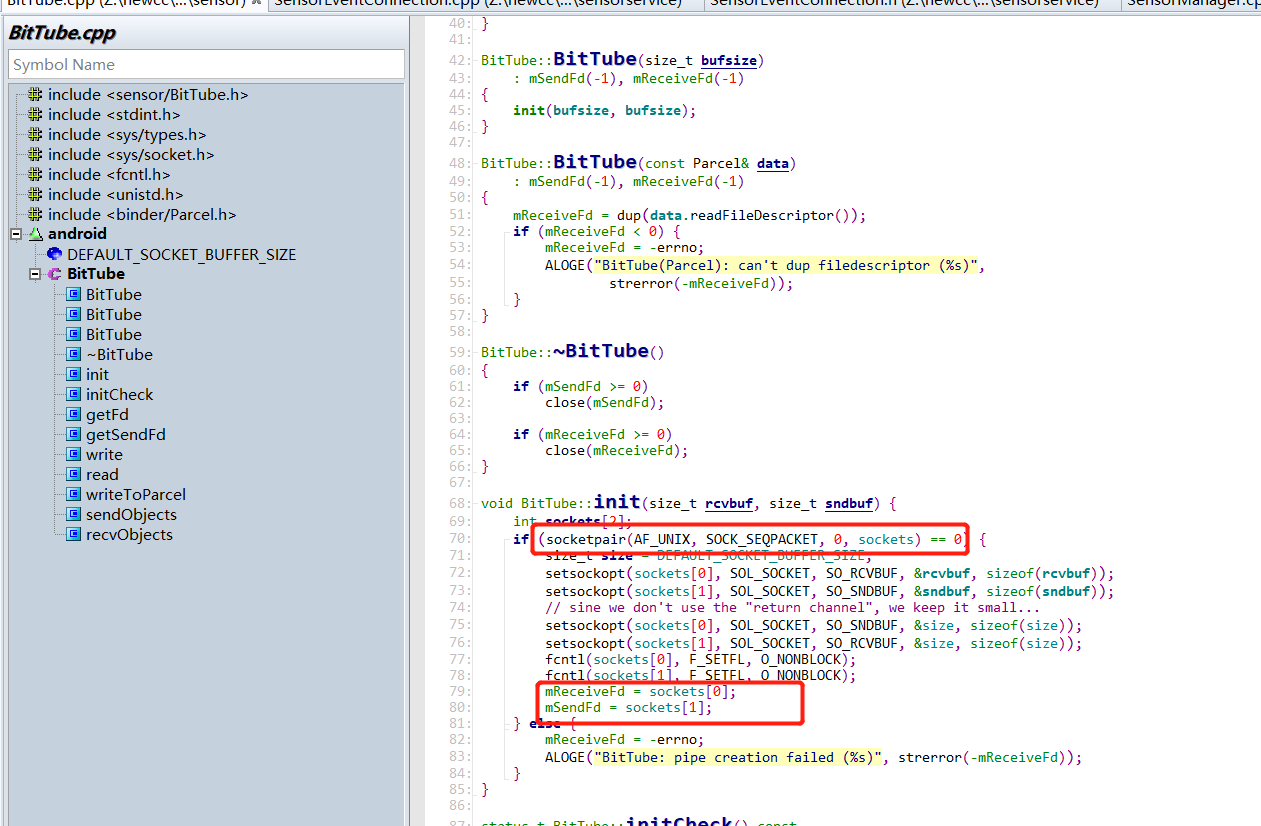
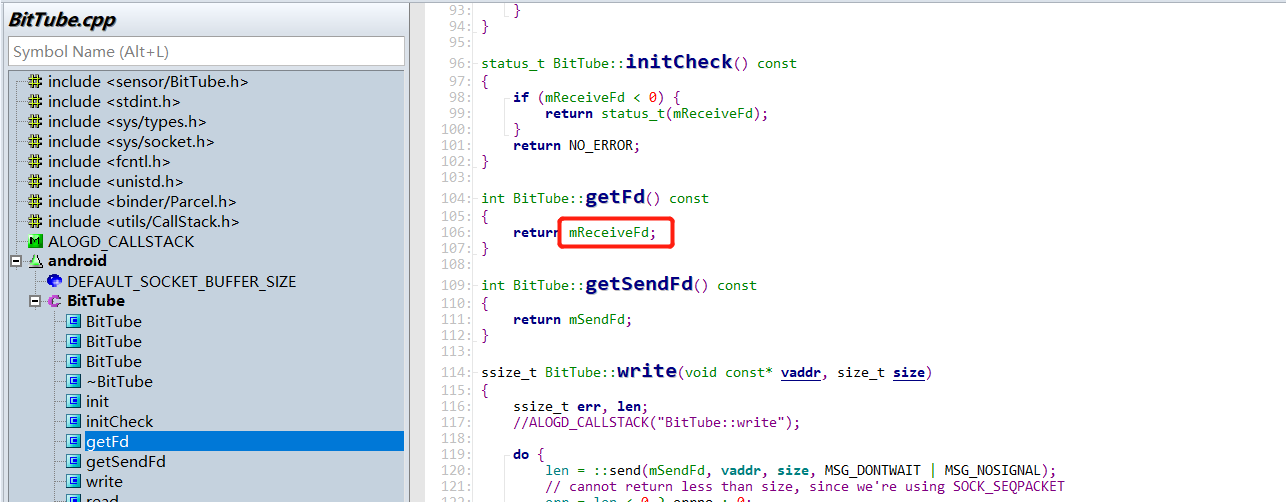
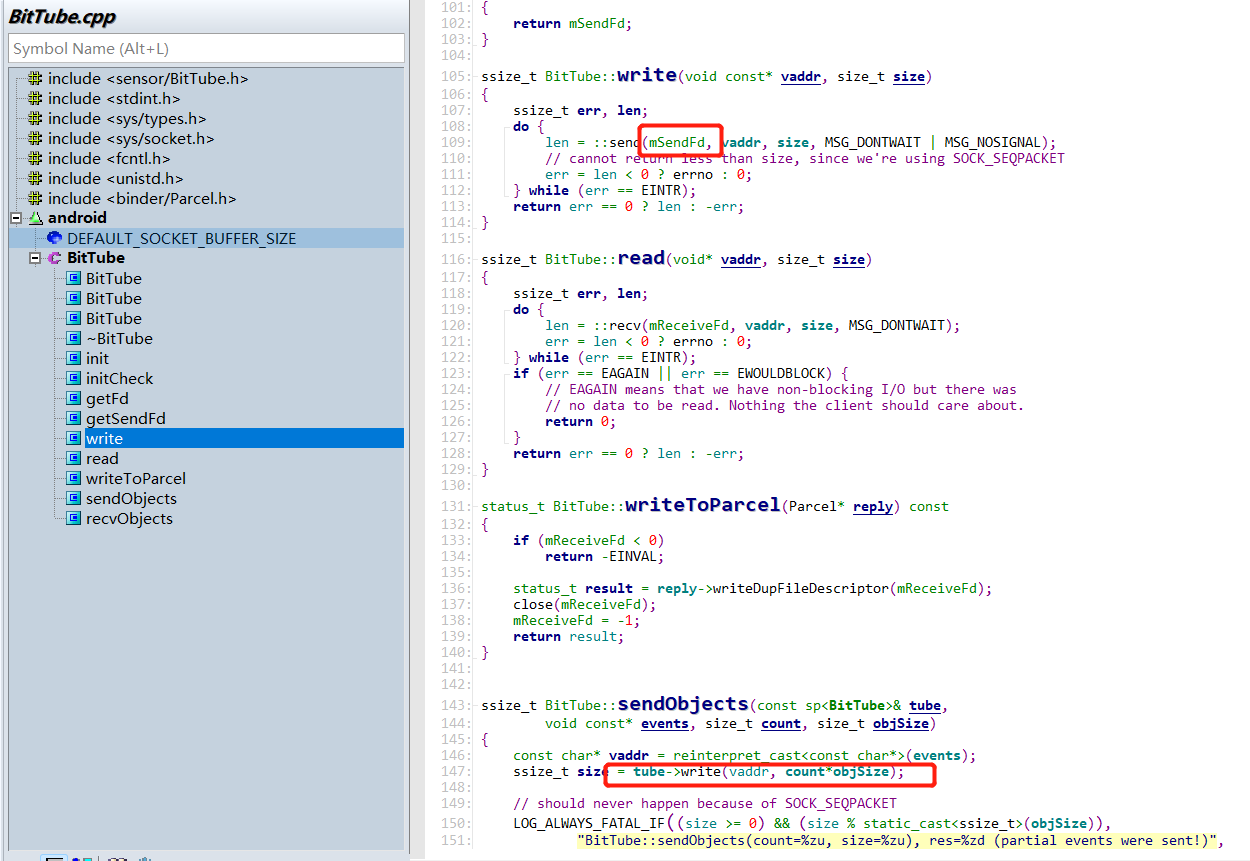
管道封装了一层。
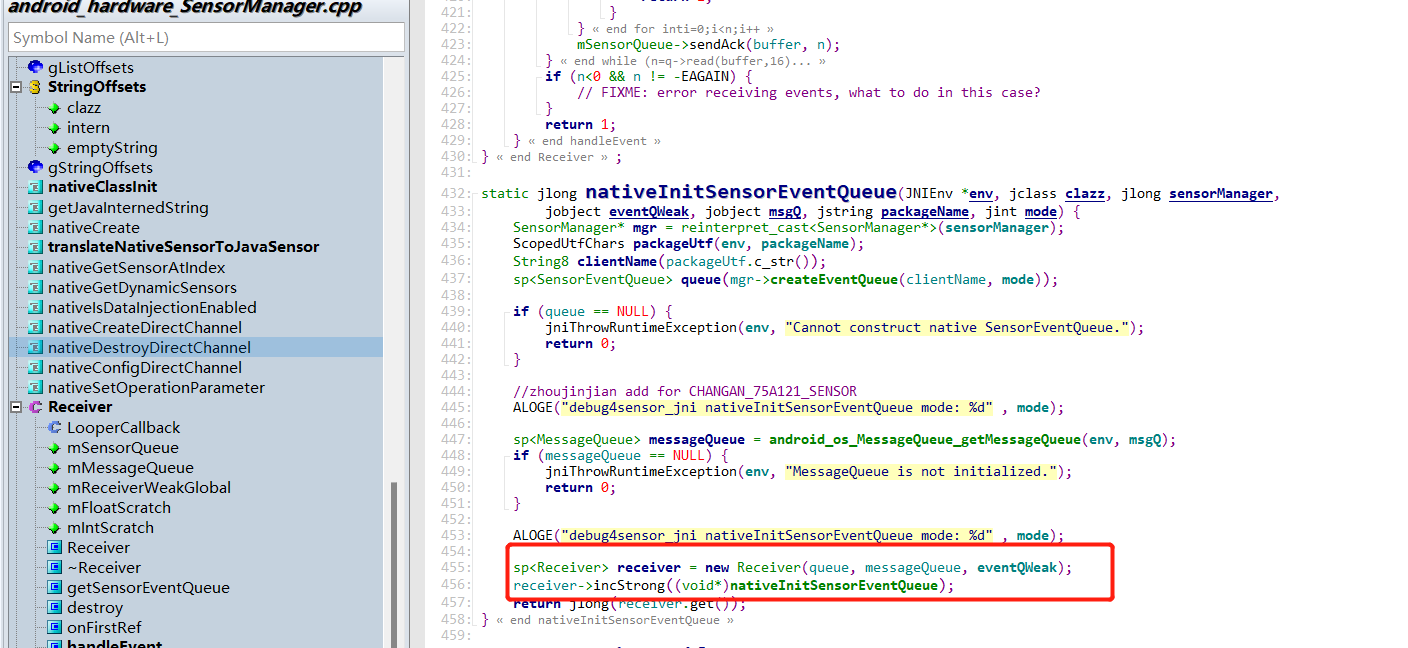


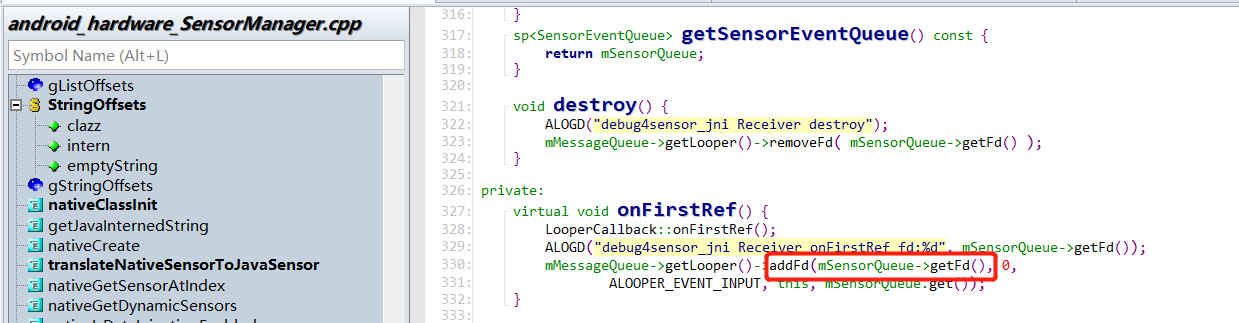
加入监听,这样管道另外一遍写入,就立即能收到回调。
Z:\newcc\lagvm\lagvm\LINUX\android\hardware\libhardware\modules\sensors\multihal.cpp
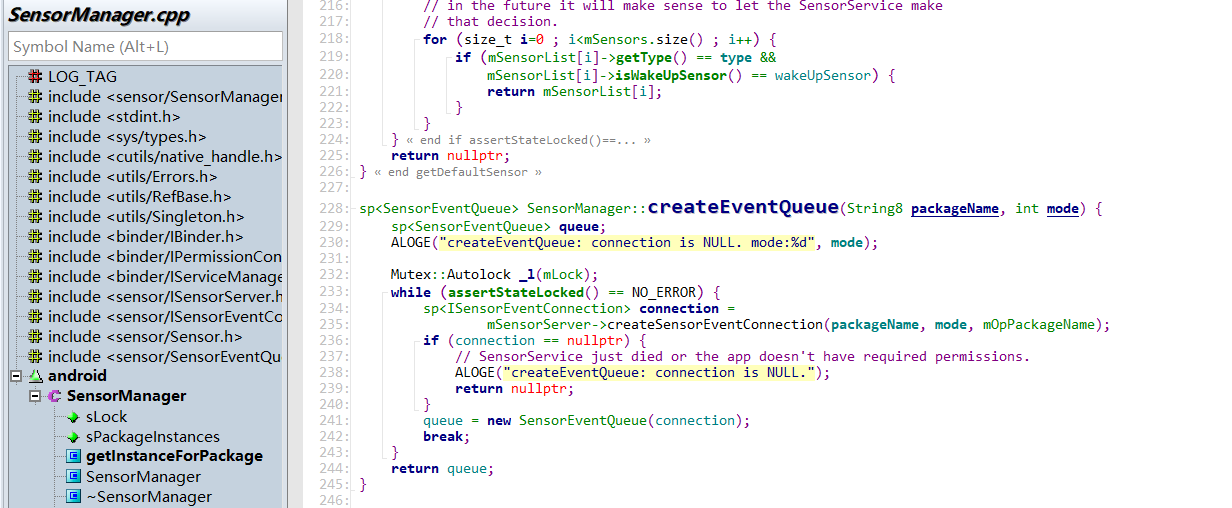
Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\native\services\sensorservice\SensorService.cpp

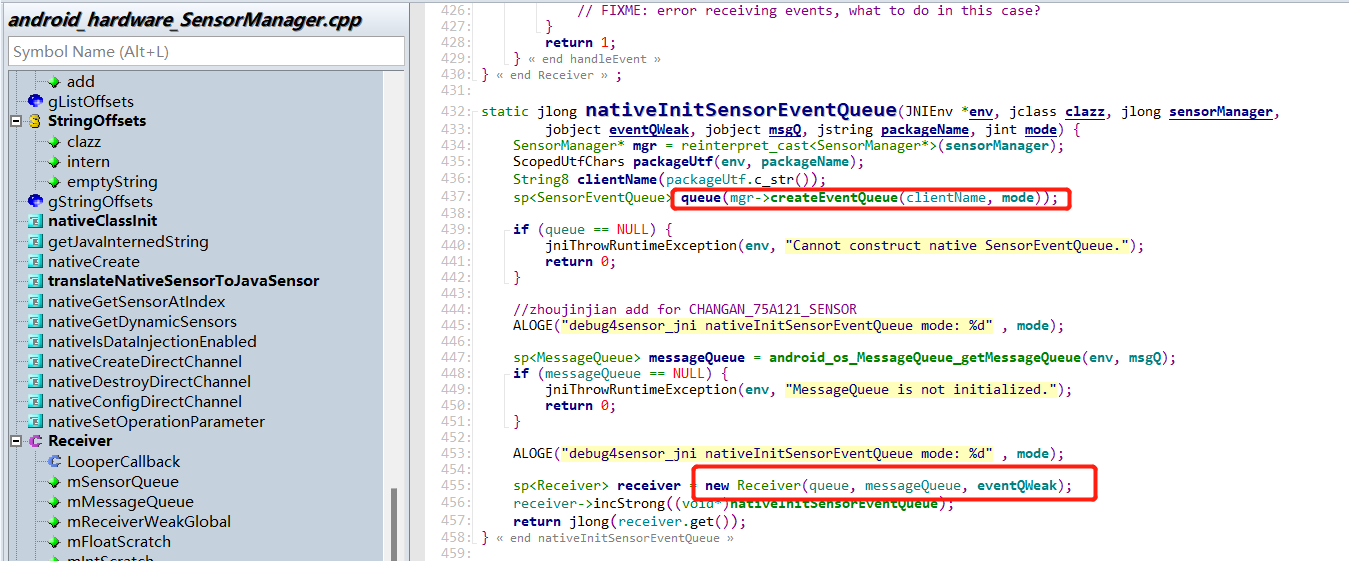
Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\native\services\sensorservice\SensorEventConnection.cpp

Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\native\libs\sensor\SensorEventQueue.cpp
Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\native\libs\sensor\BitTube.cpp

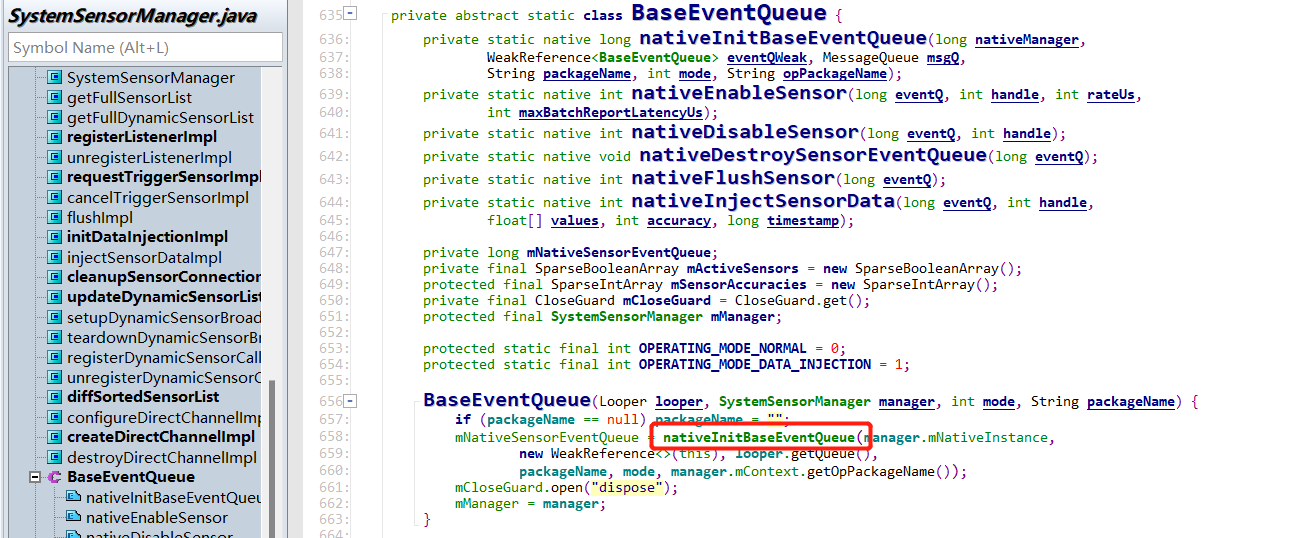
Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\base\core\java\android\hardware\SystemSensorManager.java
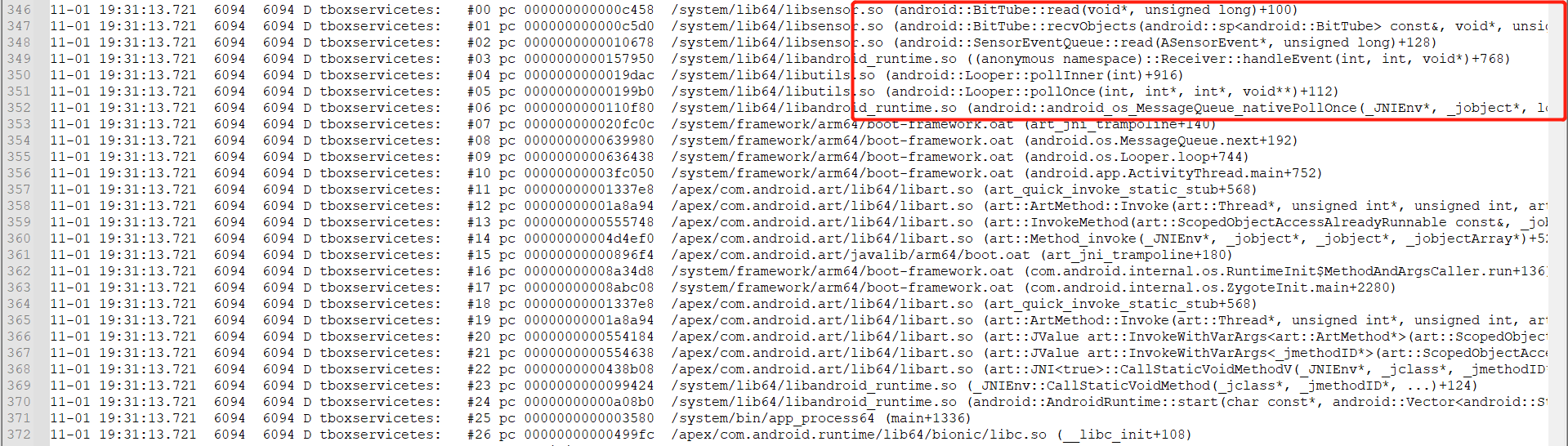
Stack Trace:
RELADDR FUNCTION FILE:LINE
v--------------> android::sp<android::BitTube>::operator->() const system/core/libutils/include/utils/StrongPointer.h:64
000000000000c458 android::BitTube::sendObjects(android::sp<android::BitTube> const&, void const*, unsigned long, unsigned long)+24 frameworks/native/libs/sensor/BitTube.cpp:160
v--------------> ~BpInterface frameworks/native/libs/binder/include/binder/IInterface.h:86
000000000000c5d0 android::BpSensorEventConnection::~BpSensorEventConnection()+28 frameworks/native/libs/sensor/ISensorEventConnection.cpp:115
0000000000010678 android::SensorEventQueue::getLooper() const+12 frameworks/native/libs/sensor/SensorEventQueue.cpp:99
00000000001576e4 (anonymous namespace)::Receiver::handleEvent(int, int, void*)+148 frameworks/base/core/jni/android_hardware_SensorManager.cpp:341
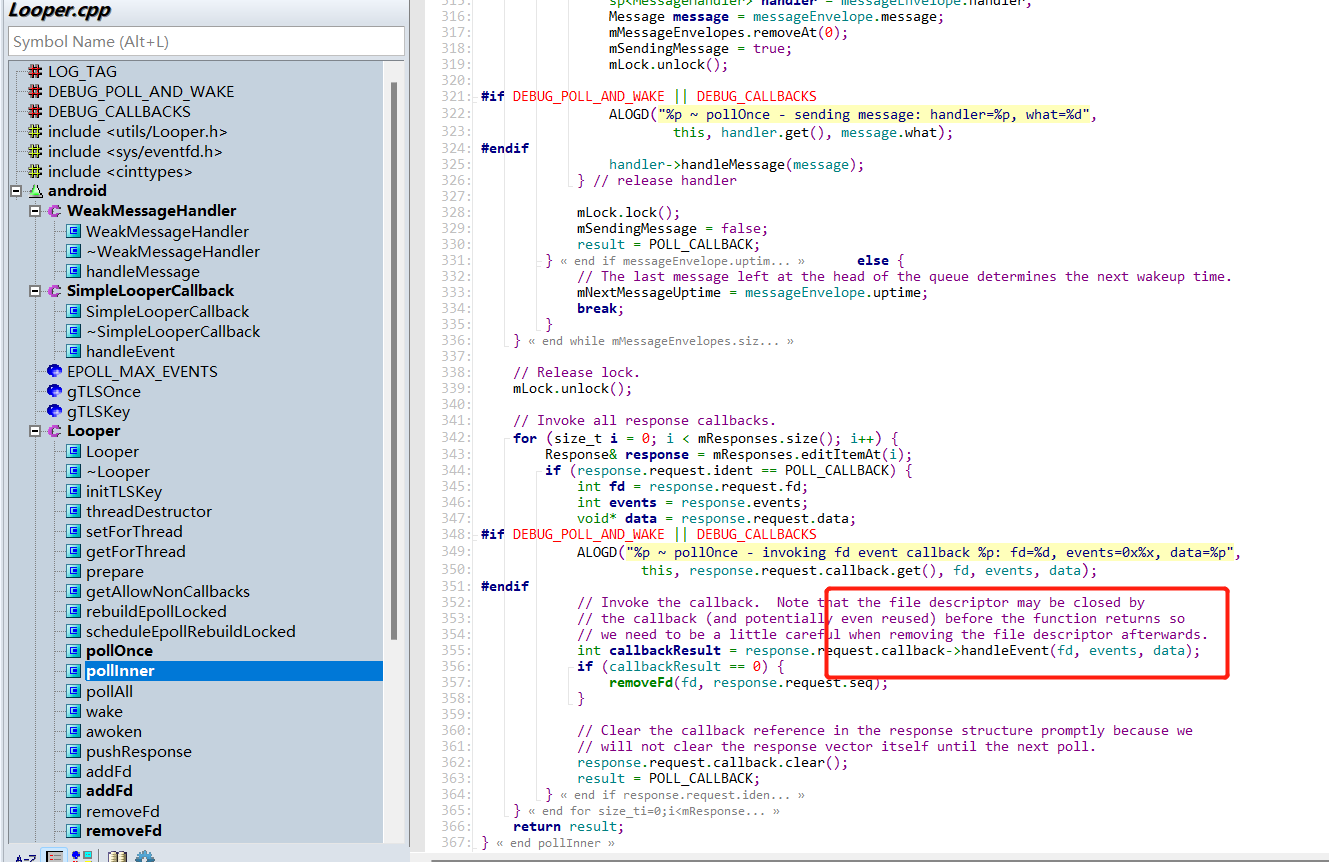
0000000000019dac android::Looper::pollInner(int)+916 system/core/libutils/Looper.cpp:355
00000000000199b0 android::Looper::pollOnce(int, int*, int*, void**)+112 system/core/libutils/Looper.cpp:207
v--------------> android::Looper::pollOnce(int) system/core/libutils/include/utils/Looper.h:267
v--------------> android::NativeMessageQueue::pollOnce(_JNIEnv*, _jobject*, int) frameworks/base/core/jni/android_os_MessageQueue.cpp:110
0000000000110f80 android::android_os_MessageQueue_nativePollOnce(_JNIEnv*, _jobject*, long, int)+44 frameworks/base/core/jni/android_os_MessageQueue.cpp:191
Z:\newcc\lagvm\lagvm\LINUX\android\frameworks\base\core\java\android\hardware\SystemSensorManager.java
{kind=link}
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android/frameworks/base$ git diff core/
diff --git a/core/java/android/hardware/SystemSensorManager.java b/core/java/android/hardware/SystemSensorManager.java
old mode 100644
new mode 100755
index 974913b290b..37f515b8112
--- a/core/java/android/hardware/SystemSensorManager.java
+++ b/core/java/android/hardware/SystemSensorManager.java
@@ -144,6 +144,10 @@ public class SystemSensorManager extends SensorManager {
@Override
protected boolean registerListenerImpl(SensorEventListener listener, Sensor sensor,
int delayUs, Handler handler, int maxBatchReportLatencyUs, int reservedFlags) {
+
+ Log.e(TAG, "registerListenerImpl listener start : delayUs " + delayUs);
+ Log.i(TAG, "registerListenerImpl listener start", new RuntimeException("here").fillInStackTrace());
+
if (listener == null || sensor == null) {
Log.e(TAG, "sensor or listener is null");
return false;
@@ -175,6 +179,7 @@ public class SystemSensorManager extends SensorManager {
listener.getClass().getEnclosingClass() != null
? listener.getClass().getEnclosingClass().getName()
: listener.getClass().getName();
+ Log.e(TAG, "registerListenerImpl listener: " + fullClassName);
queue = new SensorEventQueue(listener, looper, this, fullClassName);
if (!queue.addSensor(sensor, delayUs, maxBatchReportLatencyUs)) {
queue.dispose();
@@ -195,6 +200,7 @@ public class SystemSensorManager extends SensorManager {
if (sensor != null && sensor.getReportingMode() == Sensor.REPORTING_MODE_ONE_SHOT) {
return;
}
+ Log.i(TAG, "unregisterListenerImpl removed event listener" + sensor);
synchronized (mSensorListeners) {
SensorEventQueue queue = mSensorListeners.get(listener);
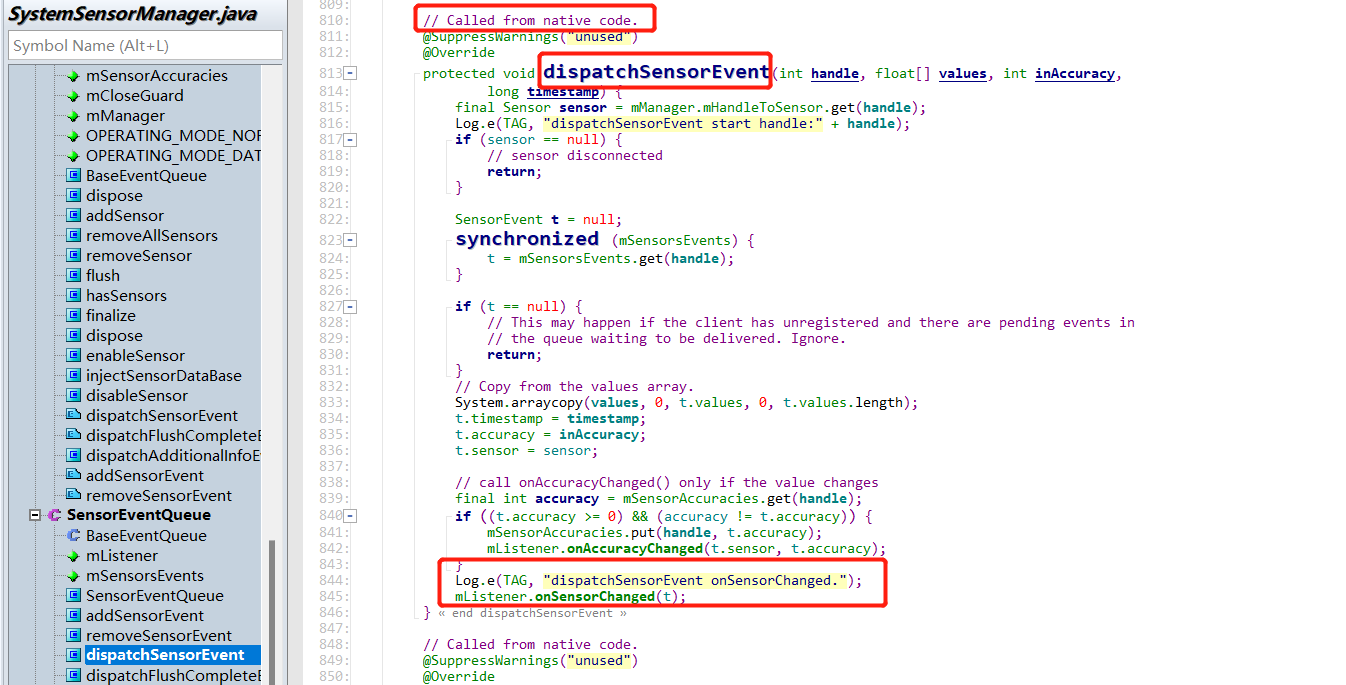
@@ -807,6 +813,7 @@ public class SystemSensorManager extends SensorManager {
protected void dispatchSensorEvent(int handle, float[] values, int inAccuracy,
long timestamp) {
final Sensor sensor = mManager.mHandleToSensor.get(handle);
+ Log.e(TAG, "dispatchSensorEvent start handle:" + handle);
if (sensor == null) {
// sensor disconnected
return;
@@ -834,6 +841,7 @@ public class SystemSensorManager extends SensorManager {
mSensorAccuracies.put(handle, t.accuracy);
mListener.onAccuracyChanged(t.sensor, t.accuracy);
}
+ Log.e(TAG, "dispatchSensorEvent onSensorChanged.");
mListener.onSensorChanged(t);
}
diff --git a/core/jni/android_hardware_SensorManager.cpp b/core/jni/android_hardware_SensorManager.cpp
index 777471202fd..263155b367f 100755
--- a/core/jni/android_hardware_SensorManager.cpp
+++ b/core/jni/android_hardware_SensorManager.cpp
@@ -319,12 +319,14 @@ public:
}
void destroy() {
+ ALOGD("debug4sensor_jni Receiver destroy");
mMessageQueue->getLooper()->removeFd( mSensorQueue->getFd() );
}
private:
virtual void onFirstRef() {
LooperCallback::onFirstRef();
+ ALOGD("debug4sensor_jni Receiver onFirstRef fd:%d", mSensorQueue->getFd());
mMessageQueue->getLooper()->addFd(mSensorQueue->getFd(), 0,
ALOOPER_EVENT_INPUT, this, mSensorQueue.get());
}
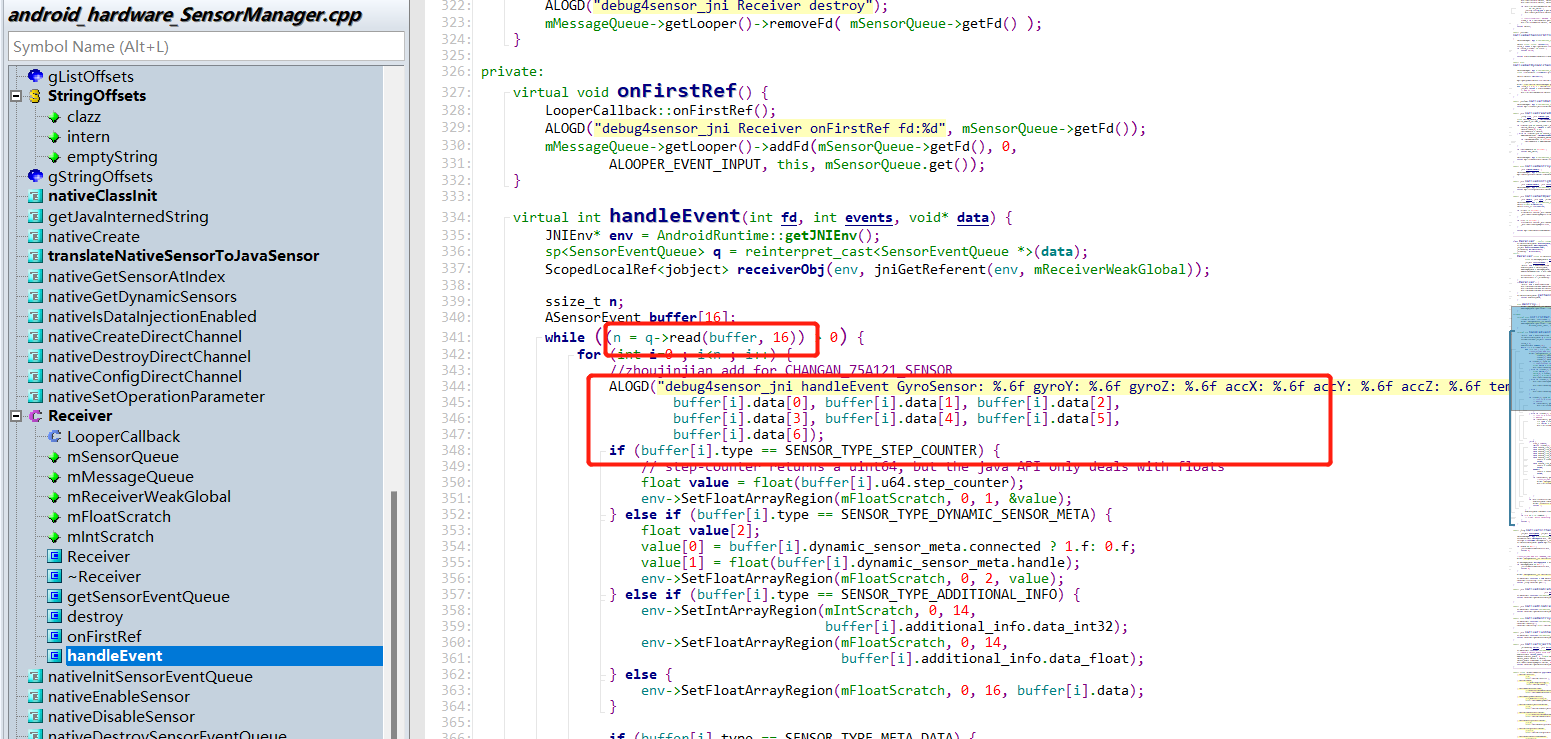
@@ -339,10 +341,10 @@ private:
while ((n = q->read(buffer, 16)) > 0) {
for (int i=0 ; i<n ; i++) {
//zhoujinjian add for CHANGAN_75A121_SENSOR
- //ALOGD("debug4sensor_jni handleEvent GyroSensor: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // buffer[i].data[0], buffer[i].data[1], buffer[i].data[2],
- // buffer[i].data[3], buffer[i].data[4], buffer[i].data[5],
- // buffer[i].data[6]);
+ ALOGD("debug4sensor_jni handleEvent GyroSensor: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ buffer[i].data[0], buffer[i].data[1], buffer[i].data[2],
+ buffer[i].data[3], buffer[i].data[4], buffer[i].data[5],
+ buffer[i].data[6]);
if (buffer[i].type == SENSOR_TYPE_STEP_COUNTER) {
// step-counter returns a uint64, but the java API only deals with floats
float value = float(buffer[i].u64.step_counter);
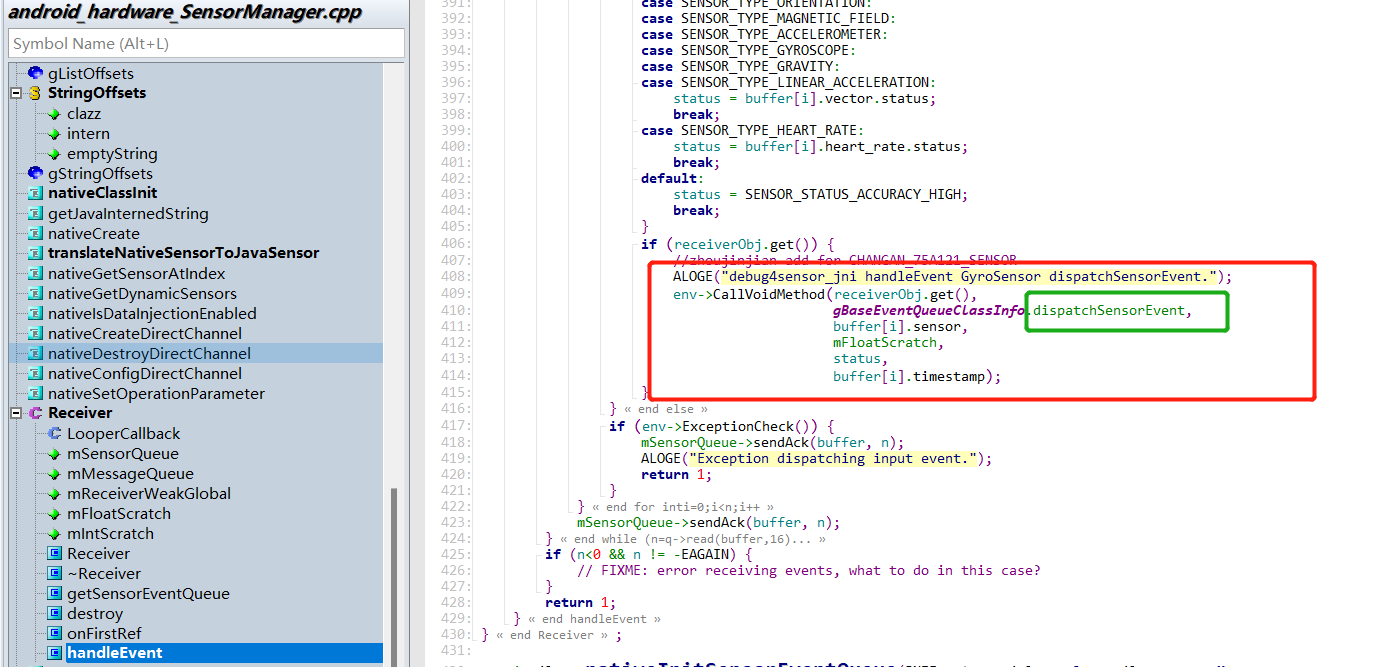
@@ -403,7 +405,7 @@ private:
}
if (receiverObj.get()) {
//zhoujinjian add for CHANGAN_75A121_SENSOR
- //ALOGE("debug4sensor_jni handleEvent GyroSensor dispatchSensorEvent.");
+ ALOGE("debug4sensor_jni handleEvent GyroSensor dispatchSensorEvent.");
env->CallVoidMethod(receiverObj.get(),
gBaseEventQueueClassInfo.dispatchSensorEvent,
buffer[i].sensor,
@@ -440,7 +442,7 @@ static jlong nativeInitSensorEventQueue(JNIEnv *env, jclass clazz, jlong sensorM
}
//zhoujinjian add for CHANGAN_75A121_SENSOR
- //ALOGE("debug4sensor_jni nativeInitSensorEventQueue mode: %d" , mode);
+ ALOGE("debug4sensor_jni nativeInitSensorEventQueue mode: %d" , mode);
sp<MessageQueue> messageQueue = android_os_MessageQueue_getMessageQueue(env, msgQ);
if (messageQueue == NULL) {
@@ -448,6 +450,8 @@ static jlong nativeInitSensorEventQueue(JNIEnv *env, jclass clazz, jlong sensorM
return 0;
}
+ ALOGE("debug4sensor_jni nativeInitSensorEventQueue mode: %d" , mode);
+
sp<Receiver> receiver = new Receiver(queue, messageQueue, eventQWeak);
receiver->incStrong((void*)nativeInitSensorEventQueue);
return jlong(receiver.get());
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android$ cd frameworks/native/services/
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android/frameworks/native/services$ git diff .
diff --git a/services/sensorservice/SensorDevice.cpp b/services/sensorservice/SensorDevice.cpp
index 682e3b07d..1f6a14b4e 100755
--- a/services/sensorservice/SensorDevice.cpp
+++ b/services/sensorservice/SensorDevice.cpp
@@ -535,10 +535,10 @@ ssize_t SensorDevice::pollHal(sensors_event_t* buffer, size_t count) {
const auto &events,
const auto &dynamicSensorsAdded) {
if (result == Result::OK) {
- //ALOGE("debug4sensor_dev pollHal gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // buffer[0].data[0], buffer[0].data[1], buffer[0].data[2],
- // buffer[0].data[3], buffer[0].data[4], buffer[0].data[5],
- // buffer[0].data[6]);
+ ALOGE("debug4sensor_dev pollHal gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ buffer[0].data[0], buffer[0].data[1], buffer[0].data[2],
+ buffer[0].data[3], buffer[0].data[4], buffer[0].data[5],
+ buffer[0].data[6]);
convertToSensorEventsAndQuantize(convertToNewEvents(events),
convertToNewSensorInfos(dynamicSensorsAdded), buffer);
@@ -1188,7 +1188,7 @@ void SensorDevice::convertToSensorEventsAndQuantize(
android::SensorDeviceUtils::quantizeSensorEventValues(&dst[i],
getResolutionForSensor(dst[i].sensor));
}
- //ALOGD("debug4sensor_dev convertToSensorEventsAndQuantize... end");
+ ALOGD("debug4sensor_dev convertToSensorEventsAndQuantize... end");
}
float SensorDevice::getResolutionForSensor(int sensorHandle) {
diff --git a/services/sensorservice/SensorEventConnection.cpp b/services/sensorservice/SensorEventConnection.cpp
index 244b4bd90..9c7169ae1 100755
--- a/services/sensorservice/SensorEventConnection.cpp
+++ b/services/sensorservice/SensorEventConnection.cpp
@@ -298,10 +298,10 @@ status_t SensorService::SensorEventConnection::sendEvents(
if (scratch) {
size_t i=0;
while (i<numEvents) {
- //ALOGE("debug4sensor_svc SensorEventConnection::sendEvents gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // buffer[i].data[0], buffer[i].data[1], buffer[i].data[2],
- // buffer[i].data[3], buffer[i].data[4], buffer[i].data[5],
- // buffer[i].data[6]);
+ ALOGE("debug4sensor_svc SensorEventConnection::sendEvents gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ buffer[i].data[0], buffer[i].data[1], buffer[i].data[2],
+ buffer[i].data[3], buffer[i].data[4], buffer[i].data[5],
+ buffer[i].data[6]);
int32_t sensor_handle = buffer[i].sensor;
if (buffer[i].type == SENSOR_TYPE_META_DATA) {
ALOGD_IF(DEBUG_CONNECTIONS, "flush complete event sensor==%d ",
@@ -327,6 +327,8 @@ status_t SensorService::SensorEventConnection::sendEvents(
ALOGD_IF(DEBUG_CONNECTIONS, "First flush event for sensor==%d ",
buffer[i].meta_data.sensor);
++i;
+
+ ALOGE("debug4sensor_svc SensorEventConnection:: 11111 count == 0 %d", count);
continue;
}
@@ -334,6 +336,8 @@ status_t SensorService::SensorEventConnection::sendEvents(
// ignore the event and proceed to the next.
if (flushInfo.mFirstFlushPending) {
++i;
+
+ ALOGE("debug4sensor_svc SensorEventConnection:: 22222 count == 0 %d", count);
continue;
}
@@ -353,6 +357,7 @@ status_t SensorService::SensorEventConnection::sendEvents(
scratch[count++] = buffer[i];
}
}
+ ALOGE("debug4sensor_svc SensorEventConnection:: 33333 do-while count == 0 %d", count);
i++;
} while ((i<numEvents) && ((buffer[i].sensor == sensor_handle &&
buffer[i].type != SENSOR_TYPE_META_DATA) ||
@@ -377,6 +382,8 @@ status_t SensorService::SensorEventConnection::sendEvents(
sendPendingFlushEventsLocked();
// Early return if there are no events for this connection.
if (count == 0) {
+
+ ALOGE("debug4sensor_svc SensorEventConnection::count == 0 %d", count);
return status_t(NO_ERROR);
}
@@ -386,6 +393,7 @@ status_t SensorService::SensorEventConnection::sendEvents(
if (mCacheSize != 0) {
// There are some events in the cache which need to be sent first. Copy this buffer to
// the end of cache.
+ ALOGE("debug4sensor_svc SensorEventConnection::mCacheSize != 0 %d", mCacheSize);
appendEventsToCacheLocked(scratch, count);
return status_t(NO_ERROR);
}
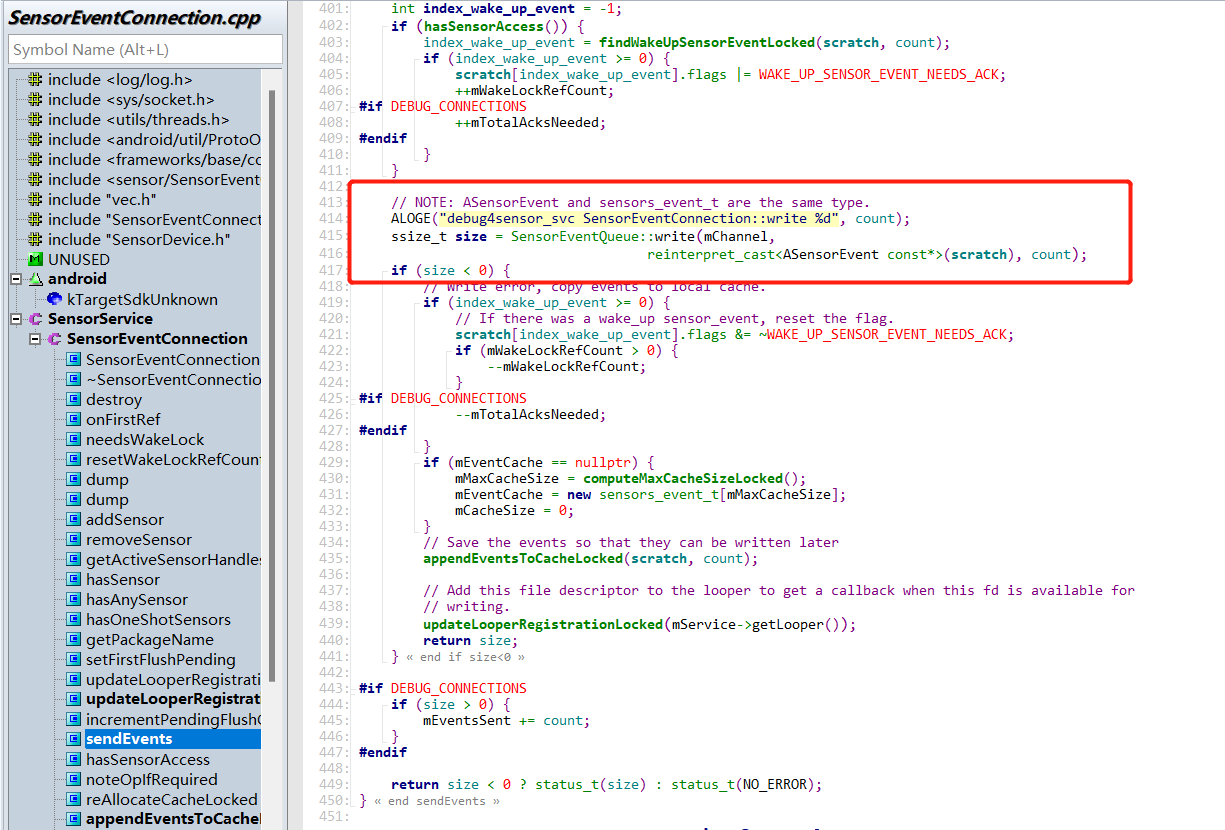
@@ -403,6 +411,7 @@ status_t SensorService::SensorEventConnection::sendEvents(
}
// NOTE: ASensorEvent and sensors_event_t are the same type.
+ ALOGE("debug4sensor_svc SensorEventConnection::write %d", count);
ssize_t size = SensorEventQueue::write(mChannel,
reinterpret_cast<ASensorEvent const*>(scratch), count);
if (size < 0) {
@@ -441,8 +450,9 @@ status_t SensorService::SensorEventConnection::sendEvents(
}
bool SensorService::SensorEventConnection::hasSensorAccess() {
- return mService->isUidActive(mUid)
- && !mService->mSensorPrivacyPolicy->isSensorPrivacyEnabled();
+ return true;
+ //return mService->isUidActive(mUid)
+ // && !mService->mSensorPrivacyPolicy->isSensorPrivacyEnabled();
}
bool SensorService::SensorEventConnection::noteOpIfRequired(const sensors_event_t& event) {
@@ -756,10 +766,10 @@ int SensorService::SensorEventConnection::handleEvent(int fd, int events, void*
sensors_event_t sensor_event;
memcpy(&sensor_event, buf, sizeof(sensors_event_t));
- //ALOGE("debug4sensor_svc SensorEventConnection::handleEvent gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // sensor_event.data[0], sensor_event.data[1], sensor_event.data[2],
- // sensor_event.data[3], sensor_event.data[4], sensor_event.data[5],
- // sensor_event.data[6]);
+ ALOGE("debug4sensor_svc SensorEventConnection::handleEvent gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ sensor_event.data[0], sensor_event.data[1], sensor_event.data[2],
+ sensor_event.data[3], sensor_event.data[4], sensor_event.data[5],
+ sensor_event.data[6]);
sp<SensorInterface> si =
mService->getSensorInterfaceFromHandle(sensor_event.sensor);
diff --git a/services/sensorservice/SensorService.cpp b/services/sensorservice/SensorService.cpp
index 2ae6ac6f5..29e65388c 100755
--- a/services/sensorservice/SensorService.cpp
+++ b/services/sensorservice/SensorService.cpp
@@ -865,7 +865,7 @@ bool SensorService::threadLoop() {
break;
}
}
- //ALOGD("debug4sensor_svc nuSensorService threadLoop count... %zd", count);
+ ALOGD("debug4sensor_svc nuSensorService threadLoop count... %zd", count);
// Reset sensors_event_t.flags to zero for all events in the buffer.
for (int i = 0; i < count; i++) {
@@ -1013,7 +1013,7 @@ bool SensorService::threadLoop() {
bool needsWakeLock = false;
for (const sp<SensorEventConnection>& connection : activeConnections) {
- //ALOGD("debug4sensor_svc nuSensorService sendEvents...");
+ ALOGD("debug4sensor_svc nuSensorService sendEvents...");
connection->sendEvents(mSensorEventBuffer, count, mSensorEventScratch,
mMapFlushEventsToConnections);
needsWakeLock |= connection->needsWakeLock();
@@ -1265,12 +1265,14 @@ sp<ISensorEventConnection> SensorService::createSensorEventConnection(const Stri
sp<SensorEventConnection> result(new SensorEventConnection(this, uid, connPackageName,
requestedMode == DATA_INJECTION, connOpPackageName));
if (requestedMode == DATA_INJECTION) {
+ ALOGD("debug4sensor_svc nuSensorService addEventConnectionIfNotPresent...");
+
mConnectionHolder.addEventConnectionIfNotPresent(result);
// Add the associated file descriptor to the Looper for polling whenever there is data to
// be injected.
result->updateLooperRegistration(mLooper);
}
- //ALOGD("debug4sensor_svc nuSensorService createSensorEventConnection...");
+ ALOGD("debug4sensor_svc nuSensorService createSensorEventConnection...requestedMode:%d", requestedMode);
return result;
}
@@ -1662,6 +1664,8 @@ status_t SensorService::enable(const sp<SensorEventConnection>& connection,
} else {
connection->setFirstFlushPending(handle, false);
}
+ //zhoujinjian add for
+ connection->setFirstFlushPending(handle, false);
}
if (err == NO_ERROR) {
diff --git a/services/sensorservice/SensorService.h b/services/sensorservice/SensorService.h
old mode 100644
new mode 100755
index 052cbfe29..10226ea79
--- a/services/sensorservice/SensorService.h
+++ b/services/sensorservice/SensorService.h
@@ -53,7 +53,7 @@
// ---------------------------------------------------------------------------
#define IGNORE_HARDWARE_FUSION false
-#define DEBUG_CONNECTIONS false
+#define DEBUG_CONNECTIONS true
// Max size is 100 KB which is enough to accept a batch of about 1000 events.
#define MAX_SOCKET_BUFFER_SIZE_BATCHED (100 * 1024)
// For older HALs which don't support batching, use a smaller socket buffer size.
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android/frameworks/native/libs/sensor$ git diff .
diff --git a/libs/sensor/Android.bp b/libs/sensor/Android.bp
old mode 100644
new mode 100755
index e8154a693..cf46444c2
--- a/libs/sensor/Android.bp
+++ b/libs/sensor/Android.bp
@@ -38,6 +38,7 @@ cc_library_shared {
"libcutils",
"libutils",
"liblog",
+ "libutilscallstack",
"libhardware",
],
diff --git a/libs/sensor/BitTube.cpp b/libs/sensor/BitTube.cpp
old mode 100644
new mode 100755
index 93555c8a3..988d656ed
--- a/libs/sensor/BitTube.cpp
+++ b/libs/sensor/BitTube.cpp
@@ -24,6 +24,15 @@
#include <unistd.h>
#include <binder/Parcel.h>
+#include <utils/CallStack.h>
+
+#define ALOGD_CALLSTACK(...) \
+ do { \
+ ALOGD(__VA_ARGS__); \
+ android::CallStack callstack; \
+ callstack.update(); \
+ callstack.log(LOG_TAG, ANDROID_LOG_DEBUG, " "); \
+ }while (false)
namespace android {
// ----------------------------------------------------------------------------
@@ -105,6 +114,8 @@ int BitTube::getSendFd() const
ssize_t BitTube::write(void const* vaddr, size_t size)
{
ssize_t err, len;
+ //ALOGD_CALLSTACK("BitTube::write");
+
do {
len = ::send(mSendFd, vaddr, size, MSG_DONTWAIT | MSG_NOSIGNAL);
// cannot return less than size, since we're using SOCK_SEQPACKET
@@ -115,6 +126,8 @@ ssize_t BitTube::write(void const* vaddr, size_t size)
ssize_t BitTube::read(void* vaddr, size_t size)
{
+ //ALOGD_CALLSTACK("BitTube::read");
+
ssize_t err, len;
do {
len = ::recv(mReceiveFd, vaddr, size, MSG_DONTWAIT);
diff --git a/libs/sensor/SensorEventQueue.cpp b/libs/sensor/SensorEventQueue.cpp
index 7c587389f..34a61baad 100755
--- a/libs/sensor/SensorEventQueue.cpp
+++ b/libs/sensor/SensorEventQueue.cpp
@@ -49,11 +49,13 @@ SensorEventQueue::~SensorEventQueue() {
void SensorEventQueue::onFirstRef()
{
+
mSensorChannel = mSensorEventConnection->getSensorChannel();
}
int SensorEventQueue::getFd() const
{
+ ALOGE("debug4sensor_lib SensorEventQueue::getFd %d", mSensorChannel->getFd());
return mSensorChannel->getFd();
}
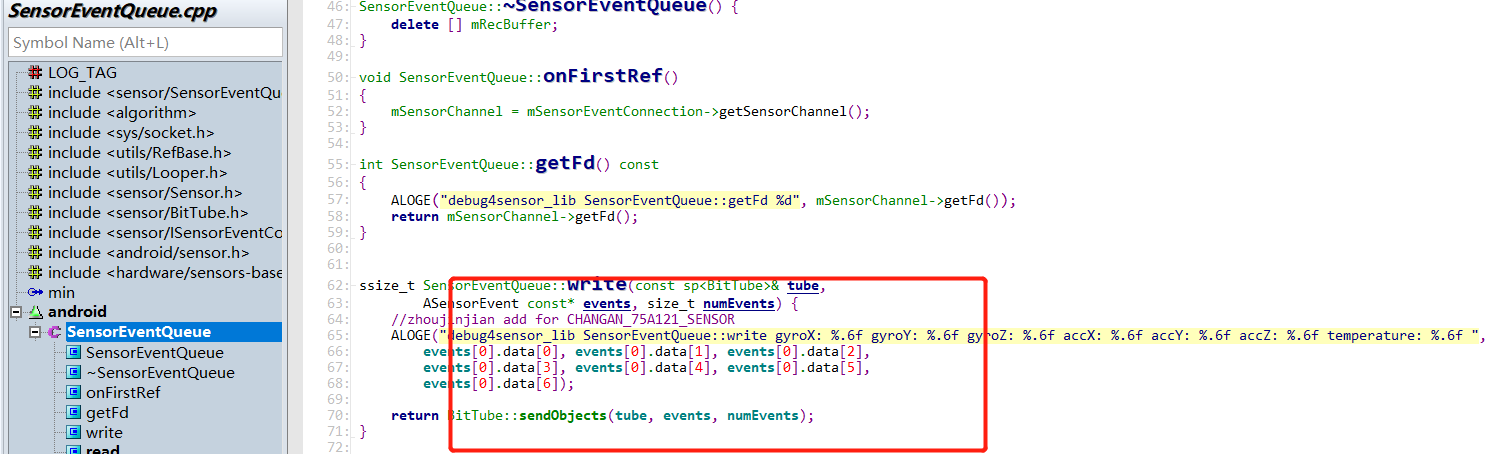
@@ -61,20 +63,20 @@ int SensorEventQueue::getFd() const
ssize_t SensorEventQueue::write(const sp<BitTube>& tube,
ASensorEvent const* events, size_t numEvents) {
//zhoujinjian add for CHANGAN_75A121_SENSOR
- //ALOGE("debug4sensor_lib SensorEventQueue::write gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // events[0].data[0], events[0].data[1], events[0].data[2],
- // events[0].data[3], events[0].data[4], events[0].data[5],
- // events[0].data[6]);
+ ALOGE("debug4sensor_lib SensorEventQueue::write gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ events[0].data[0], events[0].data[1], events[0].data[2],
+ events[0].data[3], events[0].data[4], events[0].data[5],
+ events[0].data[6]);
return BitTube::sendObjects(tube, events, numEvents);
}
ssize_t SensorEventQueue::read(ASensorEvent* events, size_t numEvents) {
//zhoujinjian add for CHANGAN_75A121_SENSOR
- //ALOGE("debug4sensor_lib SensorEventQueue::read gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // events[0].data[0], events[0].data[1], events[0].data[2],
- // events[0].data[3], events[0].data[4], events[0].data[5],
- // events[0].data[6]);
+ ALOGE("debug4sensor_lib SensorEventQueue::read gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ events[0].data[0], events[0].data[1], events[0].data[2],
+ events[0].data[3], events[0].data[4], events[0].data[5],
+ events[0].data[6]);
if (mAvailable == 0) {
ssize_t err = BitTube::recvObjects(mSensorChannel,
diff --git a/libs/sensor/SensorManager.cpp b/libs/sensor/SensorManager.cpp
old mode 100644
new mode 100755
index a4a5d135c..1886c6775
--- a/libs/sensor/SensorManager.cpp
+++ b/libs/sensor/SensorManager.cpp
@@ -227,6 +227,7 @@ Sensor const* SensorManager::getDefaultSensor(int type)
sp<SensorEventQueue> SensorManager::createEventQueue(String8 packageName, int mode) {
sp<SensorEventQueue> queue;
+ ALOGE("createEventQueue: connection is NULL. mode:%d", mode);
Mutex::Autolock _l(mLock);
while (assertStateLocked() == NO_ERROR) {
[16]+ Stopped git diff .
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android/hardware/libhardware$ git diff .
diff --git a/modules/sensors/multihal.cpp b/modules/sensors/multihal.cpp
index df219ff7..4a26add7 100755
--- a/modules/sensors/multihal.cpp
+++ b/modules/sensors/multihal.cpp
@@ -17,9 +17,9 @@
#include "SensorEventQueue.h"
#include "multihal.h"
-#define LOG_NDEBUG 1
+//#define LOG_NDEBUG 1
//debug4sensor_hal change to 0
-//#define LOG_NDEBUG 0
+#define LOG_NDEBUG 0
#include <log/log.h>
#include <cutils/atomic.h>
#include <hardware/sensors.h>
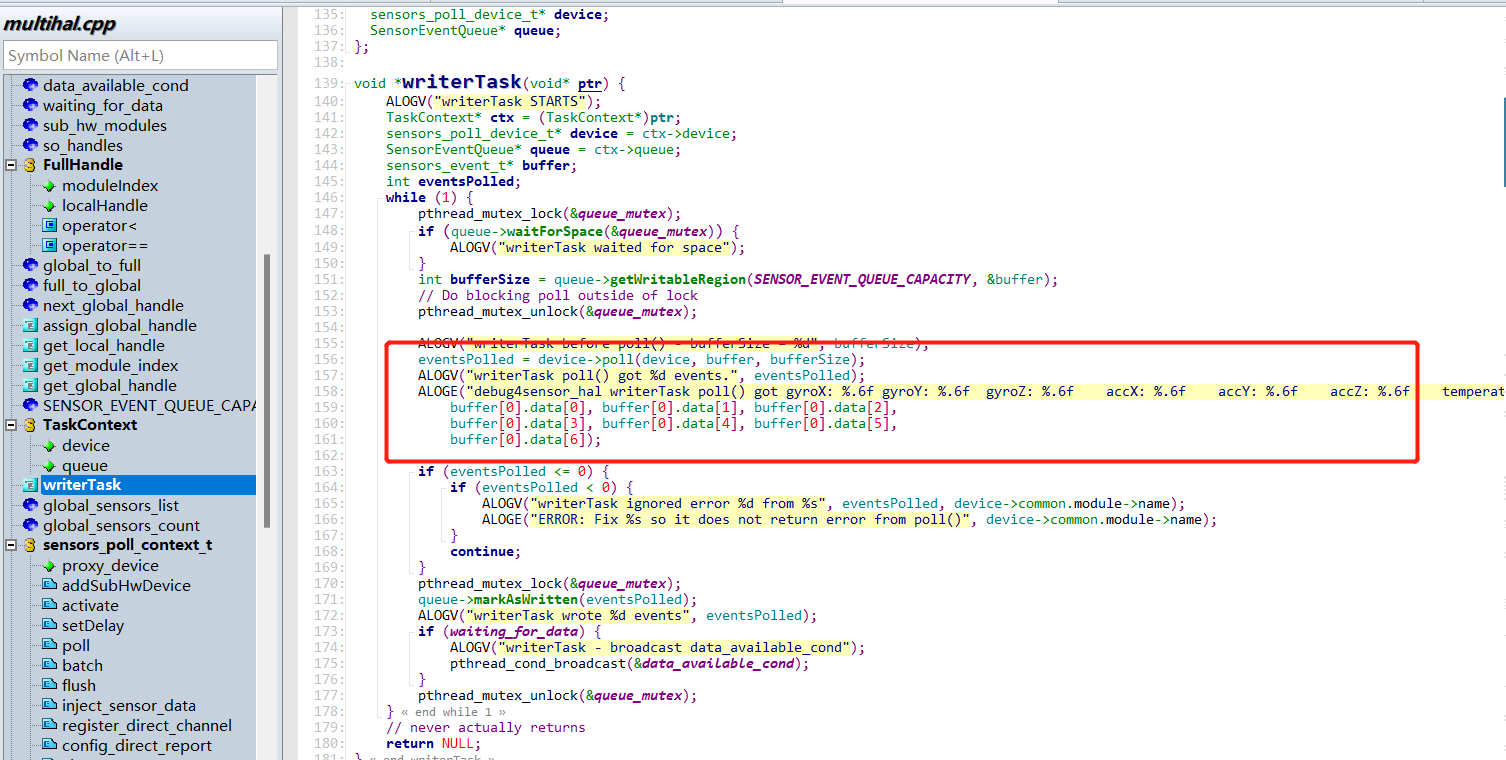
@@ -155,10 +155,10 @@ void *writerTask(void* ptr) {
ALOGV("writerTask before poll() - bufferSize = %d", bufferSize);
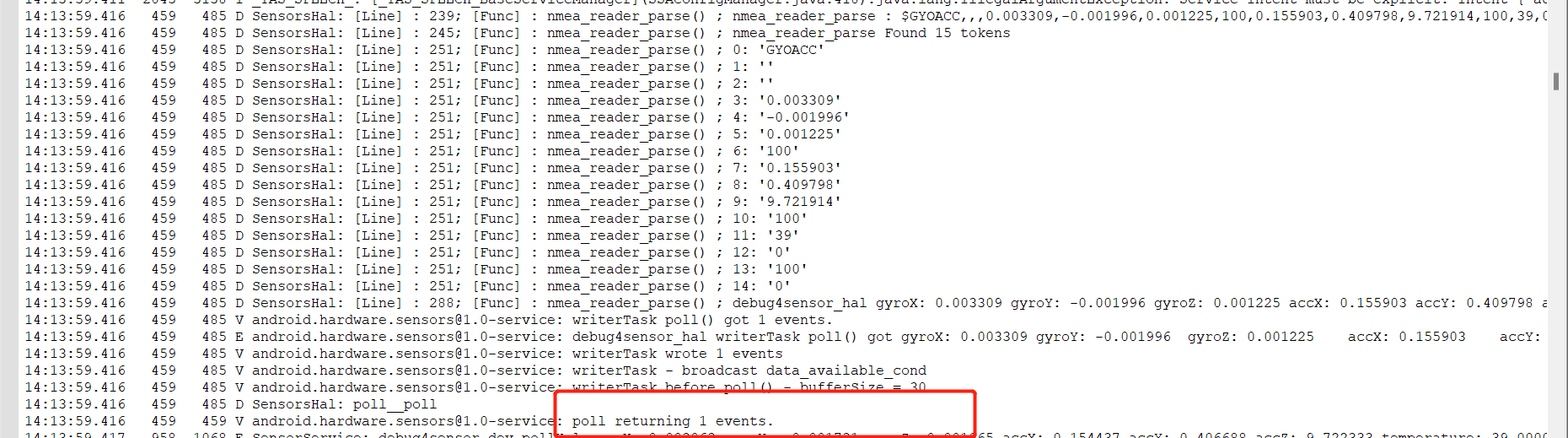
eventsPolled = device->poll(device, buffer, bufferSize);
ALOGV("writerTask poll() got %d events.", eventsPolled);
- //ALOGE("debug4sensor_hal writerTask poll() got gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
- // buffer[0].data[0], buffer[0].data[1], buffer[0].data[2],
- // buffer[0].data[3], buffer[0].data[4], buffer[0].data[5],
- // buffer[0].data[6]);
+ ALOGE("debug4sensor_hal writerTask poll() got gyroX: %.6f gyroY: %.6f gyroZ: %.6f accX: %.6f accY: %.6f accZ: %.6f temperature: %.6f ",
+ buffer[0].data[0], buffer[0].data[1], buffer[0].data[2],
+ buffer[0].data[3], buffer[0].data[4], buffer[0].data[5],
+ buffer[0].data[6]);
if (eventsPolled <= 0) {
if (eventsPolled < 0) {
zhoujinjian@localhost:~/newcc/lagvm/lagvm/LINUX/android/hardware/omosoft/sensor$ git diff .
diff --git a/sensors_omo/Android.mk b/sensors_omo/Android.mk
index 876638f..fc1b618 100755
--- a/sensors_omo/Android.mk
+++ b/sensors_omo/Android.mk
@@ -39,6 +39,7 @@ LOCAL_SRC_FILES := \
LOCAL_SHARED_LIBRARIES := \
liblog \
libcutils \
+ libutilscallstack \
libutils
include $(BUILD_SHARED_LIBRARY)
diff --git a/sensors_omo/GyroSensor.cpp b/sensors_omo/GyroSensor.cpp
index b69f80f..abe7518 100755
--- a/sensors_omo/GyroSensor.cpp
+++ b/sensors_omo/GyroSensor.cpp
@@ -44,6 +44,16 @@
#include <cutils/properties.h>
#include "GyroSensor.h"
+#include <utils/CallStack.h>
+
+#define ALOGD_CALLSTACK(...) \
+ do { \
+ ALOGD(__VA_ARGS__); \
+ android::CallStack callstack; \
+ callstack.update(); \
+ callstack.log(LOG_TAG, ANDROID_LOG_DEBUG, " "); \
+ }while (false)
+
/*****************************************************************************/
static int epoll_nmeafd;
@@ -518,6 +528,7 @@ int GyroSensor::readEvents(sensors_event_t* data, int count)
if(DEBUG_GYRO_SENSOR) {
D("GyroSensor readEvents need count ==> %d \r\n", count);
}
+ ALOGD_CALLSTACK("GyroSensor::readEvents");
int nn;
/* select && read nmea data*/
diff --git a/sensors_omo/nusensors.cpp b/sensors_omo/nusensors.cpp
index b62eef5..40060b8 100755
--- a/sensors_omo/nusensors.cpp
+++ b/sensors_omo/nusensors.cpp
@@ -32,6 +32,17 @@
#include "nusensors.h"
#include "LightSensor.h"
#include "GyroSensor.h"
+#include <utils/CallStack.h>
+
+#define ALOGD_CALLSTACK(...) \
+ do { \
+ ALOGD(__VA_ARGS__); \
+ android::CallStack callstack; \
+ callstack.update(); \
+ callstack.log(LOG_TAG, ANDROID_LOG_DEBUG, " "); \
+ }while (false)
+
+
/*****************************************************************************/
@@ -261,6 +272,7 @@ static int poll__close(struct hw_device_t *dev)
static int poll__activate(struct sensors_poll_device_t *dev,
int handle, int enabled) {
sensors_poll_context_t *ctx = (sensors_poll_context_t *)dev;
+ ALOGD_CALLSTACK("poll__activate");
LOGI("set active: handle = %d, enable = %d\n", handle, enabled);
@@ -278,6 +290,7 @@ static int poll__activate(struct sensors_poll_device_t *dev,
static int poll__setDelay(struct sensors_poll_device_t *dev,
int handle, int64_t ns) {
sensors_poll_context_t *ctx = (sensors_poll_context_t *)dev;
+ ALOGD_CALLSTACK("poll__setDelay");
LOGI("set delay: handle = %d, delay = %dns\n", handle, (int)ns);
@@ -286,6 +299,8 @@ static int poll__setDelay(struct sensors_poll_device_t *dev,
static int poll__poll(struct sensors_poll_device_t *dev,
sensors_event_t* data, int count) {
+ ALOGD_CALLSTACK("poll__poll");
+
sensors_poll_context_t *ctx = (sensors_poll_context_t *)dev;
return ctx->pollEvents(data, count);
}
@@ -294,6 +309,7 @@ static int poll__batch(struct sensors_poll_device_1 *dev,
int handle, int flags, int64_t period_ns, int64_t timeout)
{
LOGI("set batch: handle = %d, period_ns = %dns, timeout = %dns\n", handle, (int)period_ns, (int)timeout);
+ ALOGD_CALLSTACK("poll__batch");
sensors_poll_context_t *ctx = (sensors_poll_context_t *)dev;
return ctx->setDelay(handle, period_ns);
@@ -303,6 +319,7 @@ static int poll__flush(struct sensors_poll_device_1 *dev,
int handle)
{
LOGI("set flush: handle = %d\n", handle);
+ ALOGD_CALLSTACK("poll__flush");
sensors_poll_context_t *ctx = (sensors_poll_context_t *)dev;
return ctx->flush(handle);
}
@@ -313,6 +330,7 @@ int init_nusensors(hw_module_t const* module, hw_device_t** device)
{
LOGD("%s\n",SENSOR_VERSION_AND_TIME);
int status = -EINVAL;
+ ALOGD_CALLSTACK("init_nusensors");
sensors_poll_context_t *dev = new sensors_poll_context_t();
if (!dev->getInitialized()) {
[17]+ Stopped git diff .