
毕业设计作品~
目前正在编码中,尚未完成。

点击菜单栏,弹出如下窗口:

点击“新建”来创建第一个节点编辑器窗口:

在上图中,总共有四个区域:
-
菜单栏。该部分由多个菜单栏构成。其中的大部分操作有快捷方式,常用的文件操作功能在“文件”栏中。
-
节点编辑器。该部分可以同时存在多个编辑场景且相互不冲突,但是同一个文件无法被多次打开。鼠标左键操作节点,鼠标中建移动视角和缩放视角,鼠标右键打开菜单。该部分的节点可以由部分3“节点列表”中直接拖拽获取。
-
节点列表。该部分提供了多种内置的节点可供用户选择。目前的状态只能做检点的卷积神经网络。该窗口如果消失,可以从部分1中的“窗口菜单栏中选择”节点列表“即可打开。
-
状态栏。提示用户当前的状态或者某些操作。
以keras官网上的A toy ResNet为例,实现一个如下图所示的简单ResNet模型。
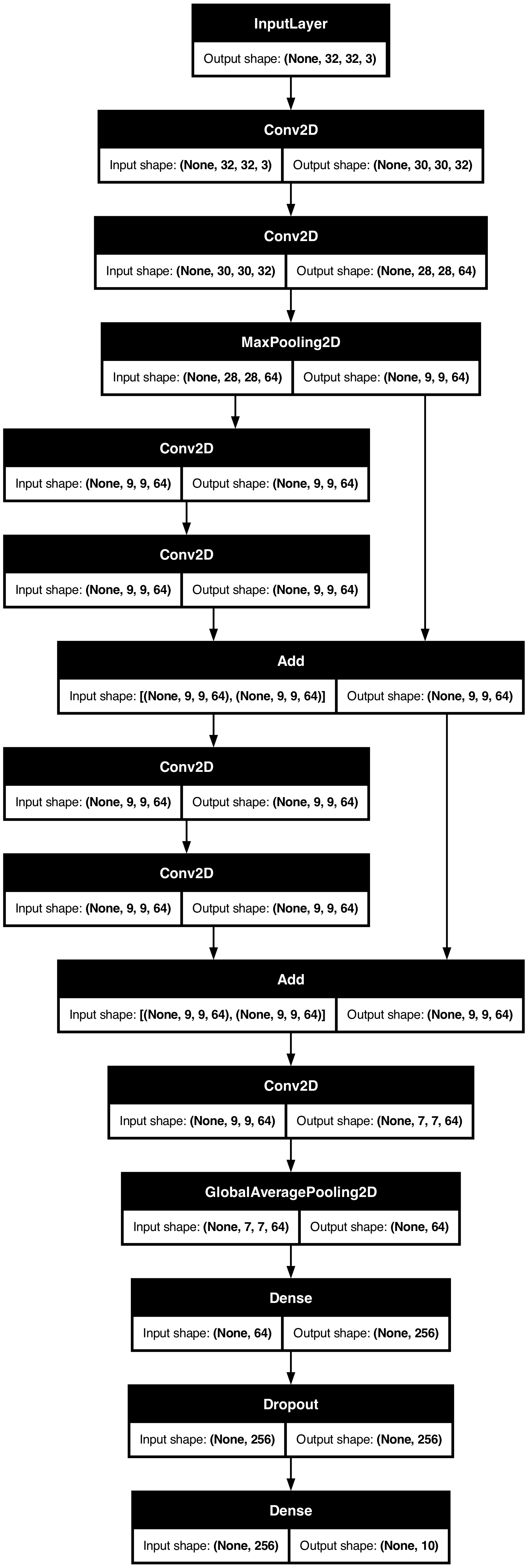
其实现代码如下:
import keras
from keras import layers
inputs = keras.Input(shape=(32, 32, 3), name="img")
x = layers.Conv2D(32, 3, activation="relu")(inputs)
x = layers.Conv2D(64, 3, activation="relu")(x)
block_1_output = layers.MaxPooling2D(3)(x)
x = layers.Conv2D(64, 3, activation="relu", padding="same")(block_1_output)
x = layers.Conv2D(64, 3, activation="relu", padding="same")(x)
block_2_output = layers.add([x, block_1_output])
x = layers.Conv2D(64, 3, activation="relu", padding="same")(block_2_output)
x = layers.Conv2D(64, 3, activation="relu", padding="same")(x)
block_3_output = layers.add([x, block_2_output])
x = layers.Conv2D(64, 3, activation="relu")(block_3_output)
x = layers.GlobalAveragePooling2D()(x)
x = layers.Dense(256, activation="relu")(x)
x = layers.Dropout(0.5)(x)
outputs = layers.Dense(10)(x)
model = keras.Model(inputs, outputs, name="toy_resnet")
model.summary()ResNet是残差神经网络,它的核心为残差网络结构,该结构如下图所示:
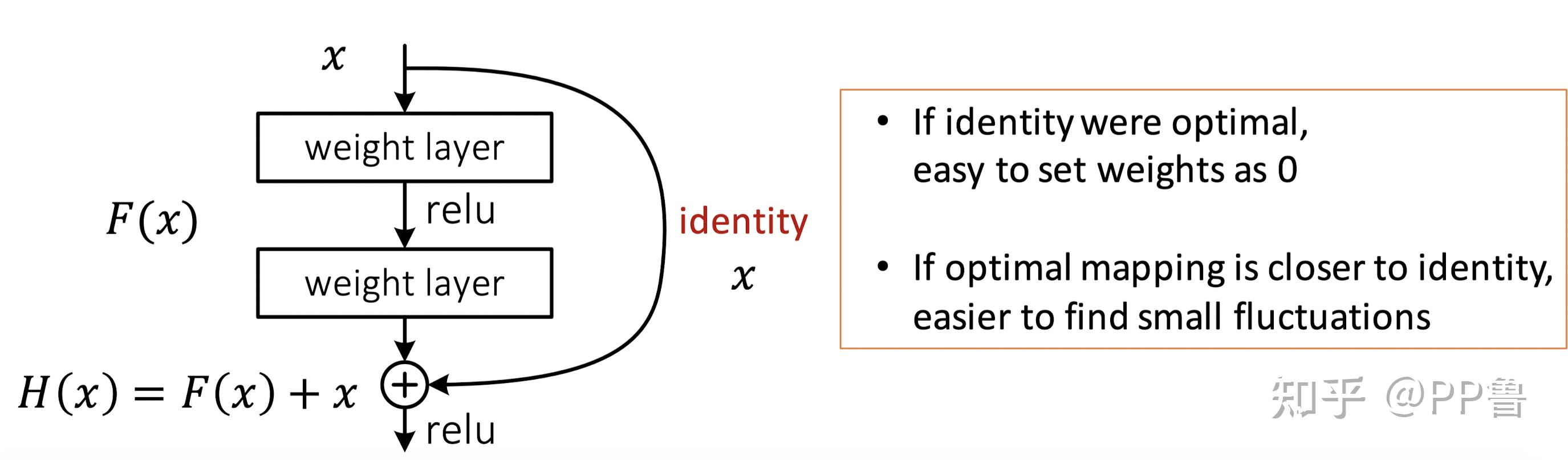
{kind=link}
注意: 以下步骤中的图片有部分内容存在谬误,仅供学习参考。如果想要参照设计, 照葫芦画瓢的话,请翻到下面的最终截图的位置。
我们首先要做的是设计基本的残差网络结构。
我们通过拖动如下图所示的拖拽方式,来获取一个简单的2D卷积节点。 虽然节点上并没有标注每行内容是什么用途,但是可以通过鼠标悬停来获取提示。
从上到下这三个整数输入框分别为filters,KernelSize,strides。 最下面的选择框代表padding方式。

在本示例中,似乎只提供了前两个参数,其它参数可以考虑是keras API的默认值。 可以查阅keras的官方文档 来获取提示。
经过查阅,前三个参数分别为32、3和1,padding为valid。
官方代码中还提供了activation选项,虽然在该节点中不存在这个参数选项, 但是可以从节点列表中选取激活函数加上:
加上之后如下图所示:

不要忘了将两个节点前后连接起来。
激活函数节点的下面有一个参数选项,该数值为0,不可以随意更改, 否则就变成了Leaky ReLU函数了。
鼠标左键选取这些部分,并按下”Ctrl + C“复制这个基本的卷积节点组合。

之后按下”Ctrl + V“粘贴复制得到的内容,然后将这两个节点组连接起来。
这样就得到了一个基本的残差结构小节点组。

将这个小节点组复制成三份,并在第一个节点组后面加上一个池化节点, 调成最大值池化(MaxPool2D)。 将第二个参数poolSize为3,第三个参数padding为same,第四个参数strides为1。 另外两个节点组后面加上Add层(后期将会改为Merge节点)。 将各节点组与新添加的节点连起来,最终效果如下图所示:

每一级首尾相连,然后让Add节点连接其前方的激活函数和上一级的最后一个节点。 这是残差神经网络的重要一部分。 其结果如下图所示:

然后在最后一个节点后面加上ResNet剩余的部分。并对前面错误的参数就行修改。 (是我懒得再截图了,具体内容看最终截图吧)

上图中的节点左上角变成了绿色。这是因为之前没有输入层,导致这些节点全是不完整的, 成为了脏节点。在加入输入层后,这些节点内容被完善,因此变成了绿色的正确标识。
在菜单栏中选择”文件“->”保存“或者按下”Ctrl + S“可以保存当前项目。如下图所示:

选择好要保存的位置并填写文件名称后即可保存。
注意: 再次打开软件的时候可能会出现节点全是无效的状态, 这可能是由于未知bug或者是因为本软件使用的框架采取惰性计算的原因导致的。 当重新加载遇到如下图的情况时,可以右键点击一个无效节点,点击计算该节点即可。

对模型的操作有三种方式,分别为编译、保存和检视。

编译总共有两个参数,分别为代价函数和优化器。
保存节点只有一个按钮,按下按钮后会出现选择保存路径的选项:

新建一个文件夹并为其命名,该文件夹将会保存模型的信息。
注意: 不要以”.keras“或”.h5“为文件夹的结尾,这会自动生成单一文件模型, 并且这种文件无法被本软件识别。
该功能由展示节点实现:

点击”模型摘要“,可以获取纯文本的模型摘要文件。

点击”模型结构图“,可以获得模型的图结构。

图片会临时存储在src/application/tmp.png目录下
依次点击“文件”->“模板”,弹出如下对话框:

选择好想要使用的模板加载后,点击“OK”后即可加载出如下的模板:

加载的模板需要用户另行保存到本地。
由于计算节点会消耗很多时间,因此这里需要用户选择手动计算节点。 事实上,这是一个bug。