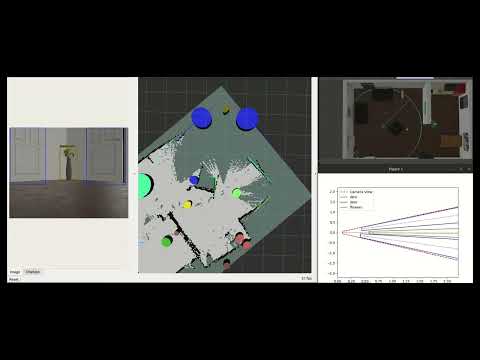
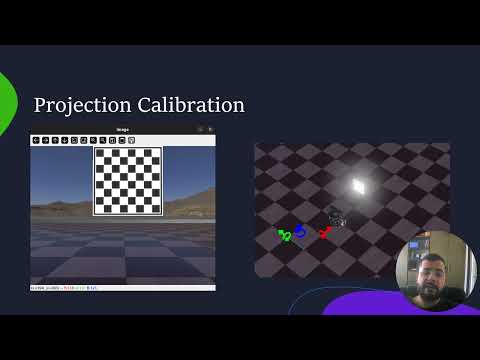
Simultaneous Localization and Mapping (SLAM) allows robots to understand where they currently are in relation to an environment, and at the same time create a map of their surroundings. Object-Conscious SLAM (OCSLAM) introduces an additional layer of knowledge by allowing the robot to locate and classify objects within this world. I propose a simple method that leverages LIDAR information already being used for regular SLAM, in combination with the You Only Look Once (YOLO) network for locating, classifying and tracking objects.