A python-based interface between the Soar Cognitive Architecture and the Cozmo robot by Anki. The Soar Markup Language, Aaron Mininger's PySoarLib and the Cozmo SDK are used to build this interface. The purpose of the interface is to allow a Soar agent to control a fully-embodied Cozmo robot, thereby embodying the Soar agent in the real world and enabling cognitive experiments to be run on a small, flexible, and robust platform.
Several libraries and tools are needed prior to installing the Cozmo-Soar interface itself.
-
Install both Python 2.7.11 or above, and Python 3.6 or above.
- Make a note of the path to the Python 3 installation. You will need to use the path to the Python 3 binary later.
-
Download and build the Soar Cognitive Architecture.
- Download the source code from GitHub here.
- Install the necessary prerequisites to Soar. The prerequrisites for each OS are listed in different pages here. If building in Windows, make sure to use Visual Studio 2015. You also must install SWIG.
- In Windows, open the Visual Studio Command Prompt; in Liinux or Mac, open the terminal. Then, cd into the root directory of the Soar source code.
- In Windows, run the command
build all --python=[Python3 path], while in Linux or Mac, runpython scons/scons.py all --python=[Python3 path], filling in the path to your Python 3 executable from step 1. The python executable used to run this command in Linux or Mac must be Python 2.7.11+, NOT Python 3. - Add the
out/directory generated to your system'sPYTHONPATHenvironmental variable.
-
Use pip to install the following python libraries to your Python 3.6 installation:
pillowcozmoopencv-python
-
Create a new directory, and download Aaron Mininger's
PySoarLib(linked above) from GitHub to that folder, and add the new directory, which should contain the root directory ofPySoarLib, to yourPYTHONPATH. -
Finally, download the Cozmo-Soar Interface code from GitHub, and add its root directory to your
PYTHONPATH.
To run a Soar agent on Cozmo in interactive mode without any custom objects, run
python3 main.py [path/to/agent.soar]replacing [path/to/agent.soar] with the appropriate path. If you don't want to run in interactive mode, you can add the -r flag as such:
python3 main.py [path/to/agent.soar] -rwhich will run without waiting for user input. Currently there is no good way to stop the agent from running, so this mode is not recommended.
You can also spawn an instance of the Soar Java debugger with the -d flag.
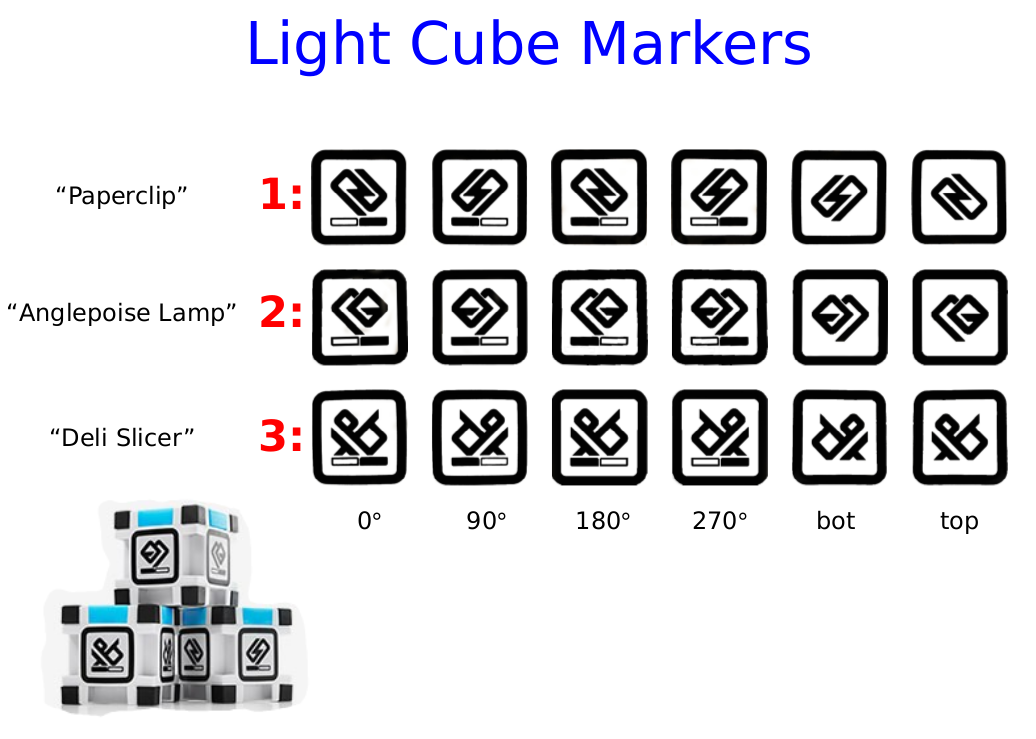
Cozmo comes with three interactive Bluetooth-enabled "light cubes", each of which comes with its own unique fiducial marker on each side. In the image below, you can see wht these fiducials look like and which cubes they correspond to. The number in red after the name indicates the cube-id of the light cube with that fiducial. The names given in the image also correspond to what is put on the ^name attribute of the cube on the input-link when the cube is being observed, with the minor exception of the "Anglepoise Lamp", which is just called "lamp."
{kind=link}
The cubes connect to Cozmo via Bluetooth (as long as their batteries are charged), and can transmit information about being tapped or moved to Cozmo. Likewise, Cozmo can transmit an instruction to the cubes which turns on or off the RGB LEDs of the cubes and can change their color. Cubes are the only objects which are compatible with the high-level object-based commands such as pick-up-object or go-to-objecct.
In addition to the three light cubes included with Cozmo, you can define custom objects using an xml file. Custom objects can currently be either cubes or walls, where walls can have arbitrary heights and widths but are assumed to be 10mm thick. Custom objects must use the fiducial images found here. The same fiducial should be applied to each side of the cube or wall which the robot might see, which means up to six fiducials are needed for cubes and up to 2 for walls. We recommend that fiducials be printed out at least 25mm x 25mm, so Cozmo will be able to detect them.
Custom objects are defined for the interface in a .xml file which should be passed into the program through the -o flag as such:
python3 main.py [path/to/agent.soar] -o [path/to/objects.xml]The XML file should have one
<objects>
...
</objects>tag, which can an arbitrary number of objects. Objects currently come in two varities, cube and wall, as explained above, are are created as follows:
<cube unique="true">
<name>cutting-board</name>
<marker width="37" height="37">Diamonds5</marker>
<size>43</size>
</cube>or
<wall unique="false">
<name>wall</name>
<marker width="37" height="37">Triangles2</marker>
<width>300</width>
<height>150</height>
</wall>where any measurement (i.e., width or height) is in millimeters. The marker names are given on the Cozmo SDK website linked above, but are easily derivable by concatenating the shape on the fiducial (circle, triagle, diamond, or hexagon) with the number of shapes on the fiducial (2, 3, 4, or 5), making sure to capitalize the first letter of the shape. The name given in the XML will be presented to the Soar agent on the input-link as a ^name attribute on the object augmentation.
The Cozmo-Soar interface provides certain input-link attributes and values to a Soar agent, and listens for certain output-link attributes and their values to allow the agent to control the Cozmo. The nature of these are described below:
- battery-voltage (float)
- carrying-block (int)
- carrying-object-id (int)
- charging (int)
- cliff-detected (int)
- face
- expression (str)
- expression-conf (int)
- face-id (int)
- name (str)
- pose
- rot (float)
- x (float)
- y (float)
- z (float)
- face-count (int)
- head-angle (float)
- lift
- angle (float)
- height (float)
- ratio (float)
- object
- object-id (int)
- connected (str)
- cube-id (int)
- descriptive_name (str)
- last-tapped (float)
- moving (str)
- name (str)
- liftable (int)
- type (str)
- pose
- rot (float)
- x (float)
- y (float)
- z (float)
- obj-count (int)
- picked-up (int)
- pose
- rot (float)
- x (float)
- y (float)
- z (float)
- robot-id (int)
- serial (str)
- change-block-color
- object-id (int)
- color (str)
- dock-with-cube
- object-id (int)
- drive-forward
- distance (float)
- speed (float)
- go-to-object
- object-id (int)
- distance (int)
- move-head
- angle (float)
- move-lift
- height (float)
- pick-up-object
- object-id (int)
- place-object-down
- set-backpack-lights
- color (str)
- turn-in-place
- angle (float)
- speed (float)
- turn-to-face
- face-id (int)
I've enumerated the different inputs a Soar agent receives from Cozmo and their meanings and potential values. Additionally, each is linked to their corresponding entry in Cozmo's SDK documentation, which may give more information.
A float. The current battery voltage. According to Cozmo's documentation, a voltage less than 3.5 is considered low.
An integer, either 0 for false or 1 for true. Indicates whether Cozmo is carrying a block.
An integer. The object id of the object which Cozmo is carrying.
An integer, either 0 for false or 1 for true. Indicates if Cozmo is currently being charged.
An integer, either 0 for false or 1 for true. Indicates if Cozmo has detected a cliff in front of it.
Provides information about a face Cozmo can currently see, such as its pose, expression, and name. Each face Cozmo sees corresponds to a unique ^face augmentation to the input-link. Face augmentations provide the following information:
expression: A string indicating what expression Cozmo thinks the face is displaying. Possiblities include "happy", "angry", "sad", and "neutral".exp-score: An integer indicating Cozmo's confidence in its expression assignment. Maximum score is 100.face-id: An integer ID given to the face internally, which uniquely identifies it among those seen. Note that this is not guaranteed to remain the same if the face leaves Cozmo's vision and then returns.name: The name Cozmo associates with the face, if it has one.pose: Pose information about the head. See pose
A float in [-25.00, 44.50]. Indicates the angle of Cozmo's head in degrees, where 0 is looking directly forward. The bounds of the range are the minimum and maximum head angle Cozmo can achieve.
The lift augmentation to the input-link provides information about the location of the lift in several forms:
angle: A float in [-11.36, 45.41]. The angle of Cozmo's lift relative to the ground in degrees.height: A float in [32.00, 92.00]. The height of the lift off the ground in millimeters.ratio: A float in [0.0, 1.0]. The ratio between how high the lift currently is and its maximum height. So a value of 0.0 means the lift is as low as possible, and a value of 1.0 is as high as possible.
Provides information about an object Cozmo can currently see and recognize, such as its pose information, whether it can be lifted, and an ID for it. Each object augmentation corresponds to a unique object Cozmo can see, and can provide some or all of the following information:
connected: An string, either 'False' or 'True'. Indicates whether the object is connected to Cozmo via Bluetooth. Only given for light cube objects.cube-id: An integer in [1, 3] which uniquely identifies which image is on the Light Cube. The paperclip with a lightning bolt is 1, the angled square with a curved tail is 2, and the one with a small square connected to a larger square is 3. Only provided if the object is a Light Cube.descriptive-name: A descriptive string name given to the object.last-tapped: Indicates when the light cube object last detected being tapped, based on its internal accelerometer. The value will be in seconds since the Soar agent began.liftable: An integer, either 0 for false or 1 for true. Indicates whether Cozmo can pick up the object with its lift.moving: A string either "False" or "True". Indicates whether the object is moving based on its accelerometer. Only provided if the object is a Light Cube.name: A string naming the object. For the light cubes, it is given by default as laid out in the Objects section. For custom objects, including walls, the name is given by theobjects.xmlfile, where it is defined in a<name>tag.object-id: An integer uniquely identifying the object among all those Cozmo can currently see. Note that the ID of an object may not be the same if it leaves and then reenters Cozmo's vision.type: A string indicating what kind of object it is. The possible types are "led-cube", "cube", and "wall". The light cubes that come with Cozmo will register as "led-cubes", while custom-defined cubes will simply be "cube."pose: Pose information about the object. See pose.
An integer. Indicates how many faces Cozmo currently sees.
An integer. Indicates how many objects Cozmo currently sees.
An integer, either 0 for false or 1 for true. Indicates whether Cozmo thinks it's been picked up off a surface.
Provides information about the location and orientation of Cozmo, objects, and faces. Pose values are calculated by Cozmo relative to where Cozmo is on start-up, and the rotation is relative to Cozmo's initial heading. However, if Cozmo is de-localized, all existing pose information is invalidated, and a new origin is generated. Pose information includes:
x: A float indicating the distance in millimeters between the origin and Cozmo (or the object/face) on the x axis.y: A float indicating the distance in millimeters between the origin and Cozmo (or the object/face) on the y axis.z: A float indicating the distance in millimeters between the origin and Cozmo (or the object/face) on the z axis.rot: The heading of Cozmo (or the object/face) in degrees.
An integer. The internal id number of the robot.
An string. The serial number of the robot in hex.
####change-block-color parameters:
object-id:intcolor:str
Change the color of the specified light cube to the given color. The object-id parameter indicates which object to change the color of, and obviously must belong to a light cube. The light cube must be in Cozmo's line of sight (and thus on the input-link). The available colors are red, green, blue, brown, yellow, orange, purple, teal, white, and off.
parameters:
height:float
Moves Cozmo's lift to the specified height. The height is given as a a float in the range [0, 1] that represents the percentage of the maximum height the lift should be moved to. A height value of 0.0 will move the lift all the way down while a value of 1.0 will move it all the way up. A value of 0.5 will move it exactly half-way up.
parameters:
object-id:intdistance:int
Instructs Cozmo to move itself to the object with the specified object ID, stopping the specified distance in front of the object. The object id must be one that Cozmo can currently see. Cozmo itself is about 60mm, so it's unadvisable to approach closer than that. This action will only work if the specified object-id belongs to a light cube that came with Cozmo, custom objects do not work.
parameters:
color:str
Changes the color of the lights on Cozmo's back. The lights can be set to either "red", "green", "blue", or "white", or "off".
parameters:
distance:floatspeed:float
Instructs Cozmo to drive forward the given distance at the given speed. The distance is given in mm and the speed in mm/s.
parameters:
angle:floatspeed:float
Instructs Cozmo to rotate in place, turning angle degrees at speed degrees a second. A positive value for angle rotates Cozmo counterclockwise, a negative value rotates clockwise.
parameters:
object-id:int
Instructs Cozmo to attempt to lift the specified object. The object must be known beforehand, and must be liftable. Cozmo will do its best to autonomously approach the object, get its lift hooks under the right spot, and the raise the lift. This is not super reliable, however, and is prone to failing a few times before Cozmo gets it right.
parameters:
Instructs Cozmo to lower whatever object it is carrying to the ground, then back up. No object id is required, since this action is really equivalent to instructing Cozmo to fully lower its lift and then back up a tad.
parameters:
object-id:int
Instructs Cozmo to place the block its currently carrying on top of the specified object.
parameters:
object-id:int
Instructs Cozmo to approach a cube and dock with it, so that the lift hooks are under the grip holes and if the lift were to move up, the cube would be lifted. The specified object must be liftable, and preferably a light cube.
parameters:
angle:float
Intstructs Cozmo to move its head to the specified angle, where the angle is in degrees and relative to looking straight ahead. The angle should be in the range [-0.44, 0.78], where -0.44 is looking as far down as possible, and 0.78 is looking as far up as possible.
- Currently, if the agent sends a command to the Cozmo, the Soar cycle pauses until the Cozmo is completely done with the action. It'd be nice if Soar could continue to run while Cozmo is executing an action.
- Create a GUI which display Soar state information (e.g., state, input-link, output-link), Cozmo information (including the camera view), and the ability to give Soar new commands.