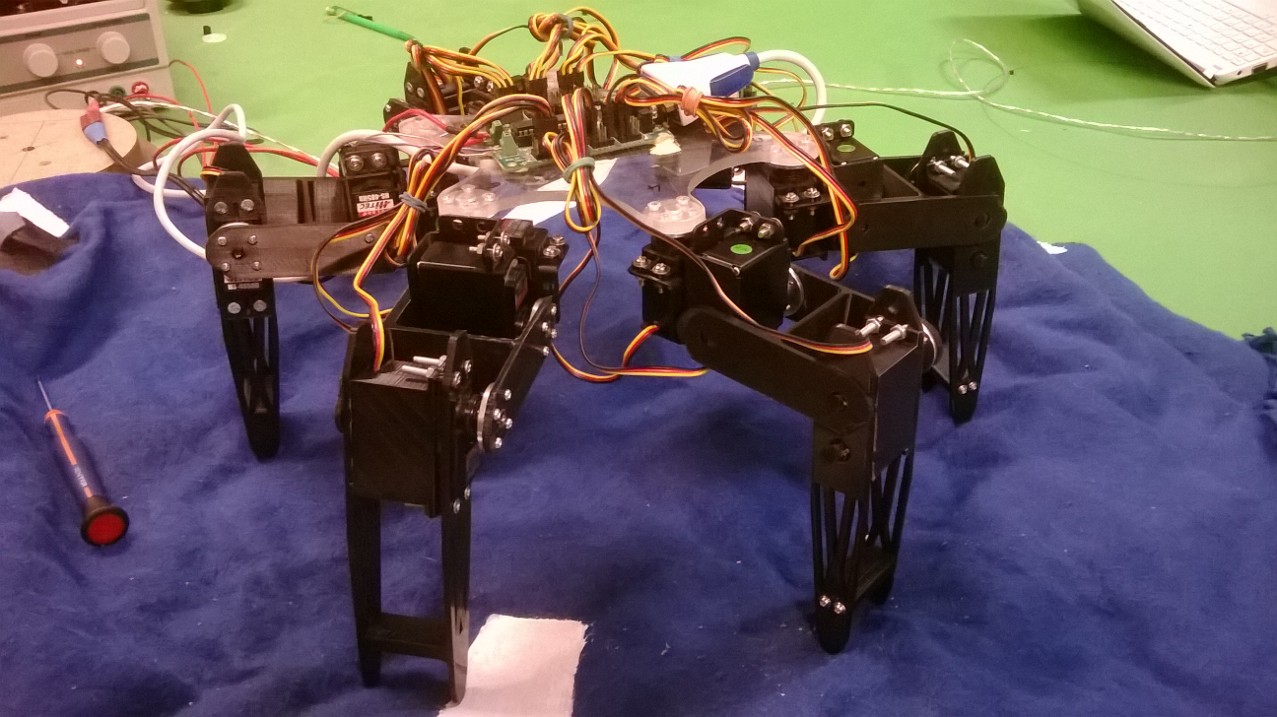
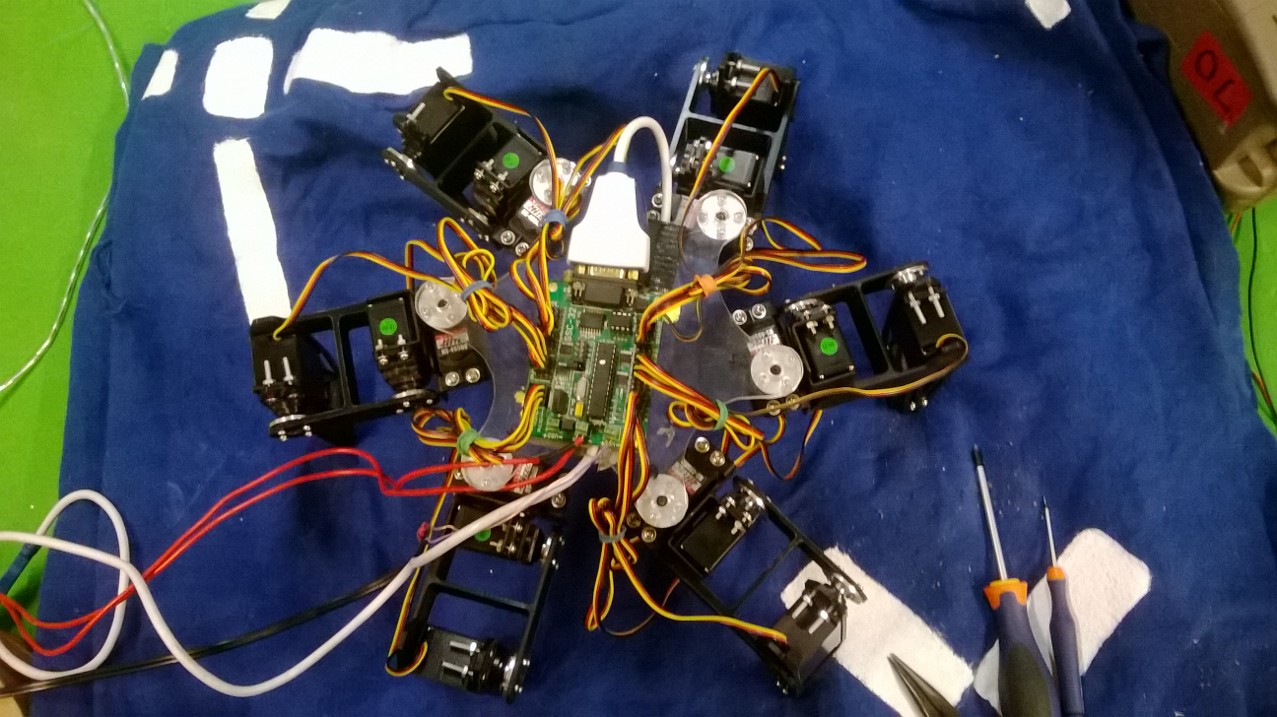
A hexapod robot that learns to walk by trial and errors, using Markov chain.
Please remark that I didn't design or build the robot itself (that was done by Vincent Studer). My job was to program the leg control and the learning.
A few videos :
- AMAH learns to stay upright
- Its first, painful walk
- A presentation video, in french
- The dance of AMAH