Introduction Currently Ardupilot supports only a certain types of sensors to be used for object avoidance. This project hopes to achieve the same using any type of sensor.
Requirements
-
A Pixhwak, APM or any Ardupilot compitable flight controller.
-
A Raspberry Pi configured as a companion computer For more info on how to configure Raspberry Pi as a companion computer go to this link http://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html
-
Basic knowledge of python.
Usage
- Copy the object_avoidance_test.py file to the Raspberry Pi.
- Change the ECHO and TRIG pin if required.
- Check if the serial port is correct.
- Open Full Parameter List in mission planner and change PRX_TYPE to 2
Testing
To check if everything works, connect the flight controller to mission planner.
Press Ctrl+F and select proximity
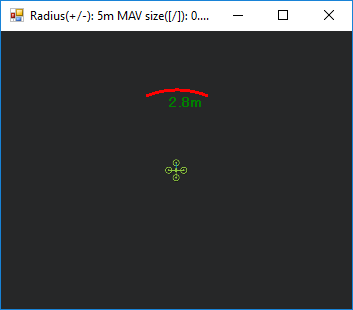
Working
This script converts the distance measured by any sensor and converts it into a distance_sensor mavlink message and sends it to the FC via the telemetry port. For more info http://ardupilot.org/dev/docs/code-overview-object-avoidance.html The function sensor_data(d,o) encodes distance and orientation as mavlink message and sends them to the fc. The argument distance takes values in cm and orientation takes value as following: 0:Forward 1:Forward-Right 2:Right 3:Back-Right 4:Back 5:Back-Left 6:Left 7:Forward-Left 24:Up 25:Down For addition of more sensors, the distance can be collected and sent via the sensor_data function with the correct orientation.