
Valetudo provides all settings and controls of the Xiaomi Vacuum in a mobile-friendly webinterface. It runs directly on the vacuum and requires no cloud connection whatsoever.
- Live Map View
- Configure Timers
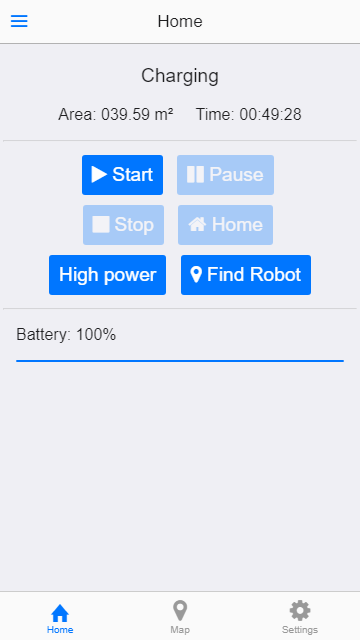
- Start/Stop/Pause Robot
- Find Robot/Send robot to charging dock
- Power settings
- Consumables status
- Wifi settings



You'll find information on how to install valetudo in the deployment folder.
If your vacuum is already rooted and you know what you're doing
just download the latest valetudo binary from the releases page and scp it to /usr/local/bin/.
Then grab the valetudo.conf from the deployment folder put it inside /etc/init/
run service valetudo start and you're good. Don't forget to chmod +x the binary.
If you are looking forward getting support for the map on any other device (like OpenHab, FHEM,..), this is now supported using Valetudo.
The current API can be found at:
YourRobotID/api/remote/map
The current implementation allows you to grab/set:
- The recent generated map as PNG (grab it at:
YOUR.VACUUM.ROBOT.IP/_mapsrc_) - The map contains the 2D contour and configurable:
**drawPath**[true|undefined]**drawCharger**[true|undefined]**drawRobot**[true|undefined]**border**(in px around the map, will be scaled as well!), default: 2**doCropping**(for debug purpose) [true|undefined]**scale**[1,..n], default: 4
- The position of the charger (
_charger_[X,Y]: position in px to overlay on the generated image) - The position of the robot (
_robot_[X,Y]: position in px to overlay on the generated image) - The angle of the robot defined by the last path (
_robotAngle_: angle in [0-360] of the robot; 0: oriented to the top, 90: oriented to the right)
A fully configured call would look like that:
YOUR.VACUUM.ROBOT.IP/api/remote/map?drawRobot=false&drawCharger=true&scale=5&border=3&doCropping=true&drawPath=true.
The json answer would look like the following:
{"scale":5, "border":15, "doCropping":true, "drawPath":true, "mapsrc":"/maps/2018-08-19_10-43-50.png", "drawCharger":true, "charger":[65,620], "drawRobot":false, "robot":[51,625], "robotAngle":90}If a parameter has not been defined/set, the default value will be used (marked bold above).
The current version of valetudo is the result of 8 not so rainy afternoons. Expect bugs.
Theres a Todo.md with stuff that needs to be done
Valetudo does not feature access controls and I'm not planning on adding it since I trust my local network. You could just put a reverse proxy with authentication in front of it if you really need it.
Please don't just forward the port to make it accessible on the go..
In order to use the zoned cleanup and the go to functionality, a config.json file has to be create in the folder with the binary. The format is:
{"spots": [["Wohnzimmer",-2000,1000],
["Küche",-3800,4000],
["Bad",3000,2500]],
"areas": [["Küche",[[-3100,0,-4150,4200,2],[-3100,3700,-2100,2300,1]] ],
["Schlafzimmer",[[-20000,10000,-19000,12000,1]]]
]
}The correct values can be checked with the functions at the Zone tab. All coordinates are relative to the docking station in mm. When you stand in front of the docking station, y increases whenever the docked robot comes to you. X increases if the robot drives to your left. One area can consist out of multiple zones.
Syntax for spots: [Name, x, y]. Syntax for areas: [Name, [[x1, y1, x2, y2, itterations],...]]
Q: Why the name?
A: Valetudo is the roman name for the greek goddess Hygieia which is the goddess of health, cleanliness and hygiene. Also I'm bad at naming things.