marker_coordinate confused and aruco_mapping detected no marker. #55
Comments
|
The convention is to ensure that the X and Z axes are aligned along the edges of the cardboard marker. This makes it easier to estimate the corner locations using the board dimensions as it is done here. Regarding your second question, ensure that the topic name, intrinsic calibration values, and marker dimensions are set properly. |
|
I run aruco_mapping package independently, and no marker detected while all seems good. the runtime shotcut is as follow: |

|
Maybe you could vary the distance between the markers and your camera and try. Also ensure that the marker size in your launch file is correct. |
|
@karnikram yes, I did vary the distance to test aruco_mapping package independently. unfortunately, nothing new happens, shotcut is as follow: one question, Should the dictionary parameter of markers be passed explicitly? as showed above, I generated makers ID 512 and 513 with 7 dictionary parameter whose detail is available here. by the way, aruco_detect package works well for the same scene. the runtime shotcut is as follow: looking forward to your reply. |


|
This seems very weird. Are you *sure* the values in the .ini file are
right? The same values that are published in the camera_info topic? And no,
you don't have to pass any other parameter.
…On Fri, 22 Jun 2018 07:47 ZhengPan2014, ***@***.***> wrote:
@karnikram <https://github.com/karnikram> yes, I did vary the distance to
test aruco_mapping package independently. unfortunately, nothing new
happens, shotcut is as follow:
[image: image]
<https://user-images.githubusercontent.com/15884732/41754023-239b557e-7603-11e8-951e-50c2bf7ac27f.png>
one question, Should the dictionary parameter of markers be passed
explicitly? as showed above, I generated makers ID 512 and 513 with 7
dictionary parameter whose detail is available here
<http://wiki.ros.org/aruco_detect>.
by the way, aruco_detect package works well for the same scene. the
runtime shotcut is as follow:
[image: image]
<https://user-images.githubusercontent.com/15884732/41754511-2f731312-7605-11e8-8c24-59ebdc0fc493.png>
looking forward to your reply.
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<#55 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AMETK_zPOj1_yfQXZlx8yRK8nmVrKqLHks5t_FOjgaJpZM4UqR4g>
.
|
|
@karnikram yes, after running aruco_detect package successfully with topic /mynteye/left/image_rect/compressed and /mynteye/left/camera_info, I copy /mynteye/left/camera_info correspondding paramters to zed_left_uurmi.ini file and run aruco_mapping with /mynteye/left/image_rect and no maker detected. |
|
I annotated this sentence in aruco_mapping.cpp lidar_camera_calibration-master/dependencies/aruco_mapping/src/aruco_mapping.cpp 440 ros::Duration(BROADCAST_WAIT_INTERVAL).sleep(); |
|
@ZhengPan2014 Hi, have you been able to detect the markers? I trying the package and also unable to detect anything |
|
Hi @ZhengPan2014, the same problem with you, aruco_mapping can not detect marker, but aruco_detect with correct dictionary argument can detect the above marker. Aruco_mapping doesn't have this param. BTW, did you have solved this problem? Could we have a discussion, thanks a lot! |
|
Hi @ericzzj1989, I figure out this problem. The aruco_mapping and author modified aruco_mapping can only detect original aruco marker type, aruco_detect can only detect dictionary aruco marker type, see online aruco marker generator. When using this web site generate marker, the set "Marker size, mm" does not match the actual marker size, you must manual measure with a ruler. |
|
@narutojxl Many thanks. In addition, I encounter an another problem. The following is my setup: The problem is that the calculated poses are not stable and even sometimes jump to the wrong data. Did you encounter the same problem. Could we have a discussion, thanks a lot! |
|
Hi @ericzzj1989, i only use this open source for lidar camera calibration, treating aruco_mapping as a black box and do not read its source code. Maybe i only have two markers, the calculated markers pose are stable. |
|
@narutojxl Ok. Many thanks! |
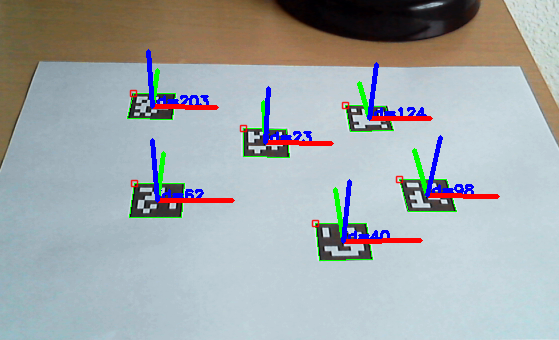
@ankitdhall I'm confused about the coordination description of aruco maker as you stress the importance of Y axis pointing outward while XY planer is lying on marker planer like the following picture in our daily usage. X(red), Y(green), Z(blue). Do that mean any special function of this difference? in addition, aruco_mapping detected no marker when I launch this package, any advice? thank you!
The text was updated successfully, but these errors were encountered: