A LEGO robot playing TicTacToe
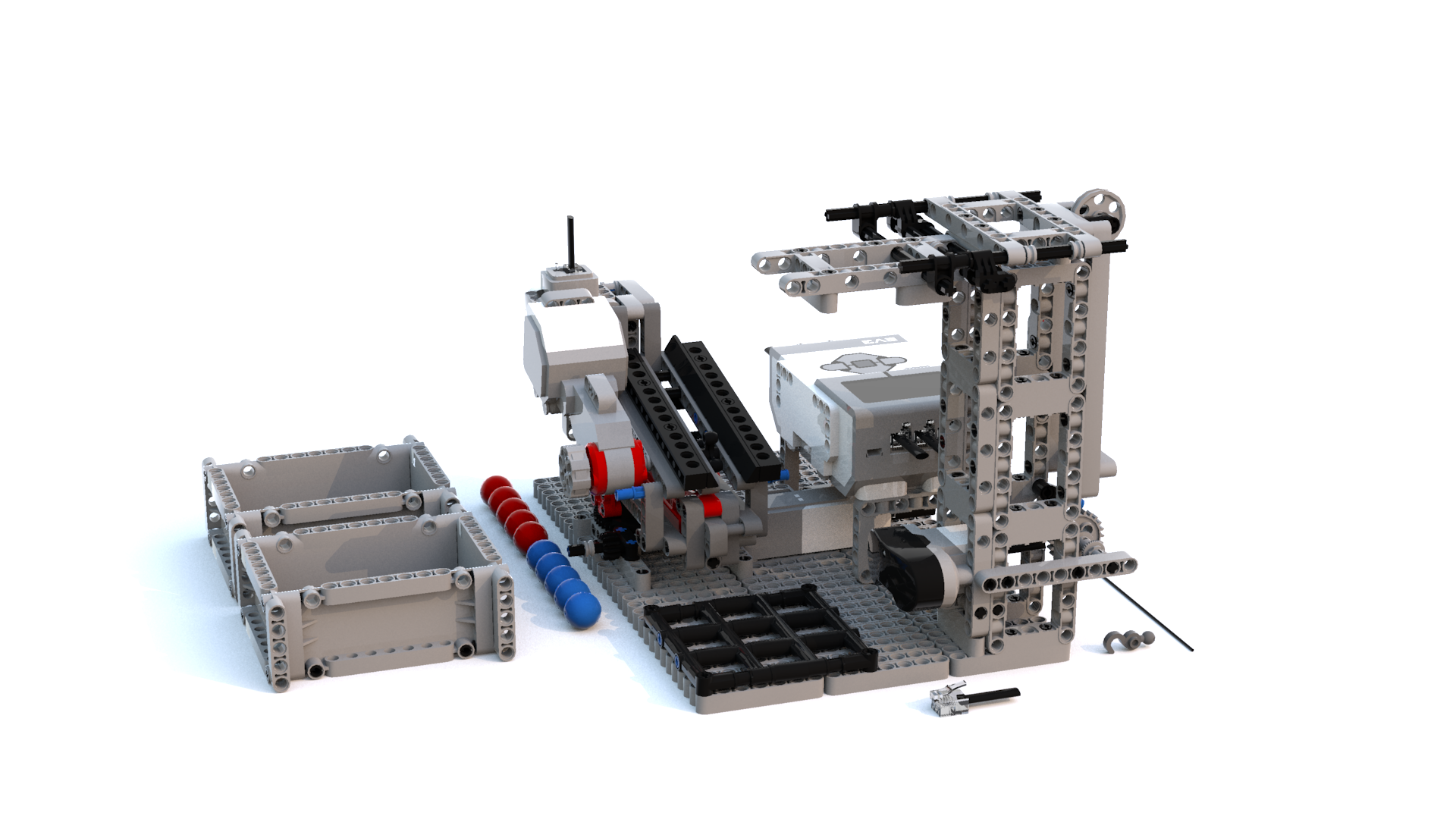
This project is for a TicTacToe playing LEGO robot. It uses a Mindstorms EV3 to control the motors and sensors. It uses three motors to drop the balls into the right field. The robot uses a NXTCam camera to track the balls on the board. The robot is using red balls and the human player uses blue balls. An IR sensor detects the hand of the numan player when he/she makes a move.
To enable the robot to make smart moves, it uses a MiniMax algorithm. In this project, all future possibilites are explored an rated according to their winning chances. The work is based on the TicTacToe code of Thomas Kaffka.
The robot will be shown at the Christchurch Brick Show 2017. Afterwards I will continue to work on the code. I would like to make the robot more robust against misplacments of balls and the human potentially cheatig.
More information and building instructions for the LEGO Model can be found here: http://www.bartneck.de/2017/07/17/tictactoe-playing-lego-mindstorms-robot-using-computer-vision