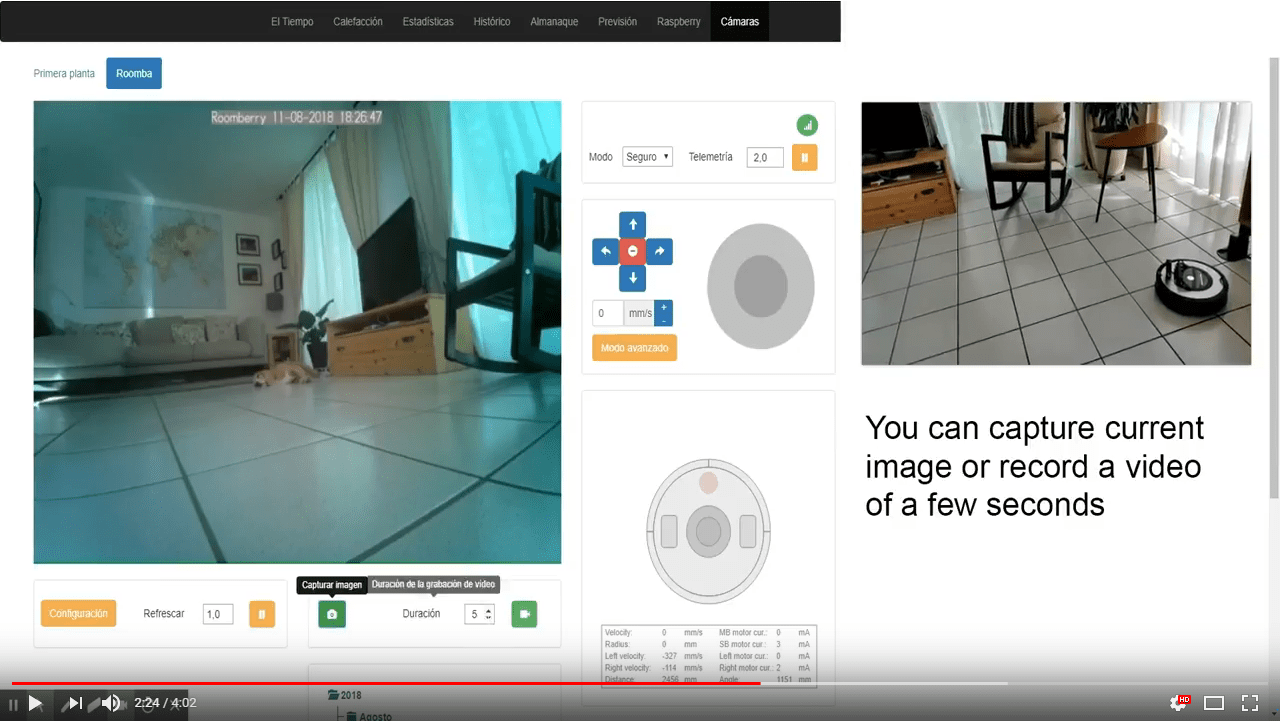
Roomberry is a surveillance robot based on Roomba using a Raspberry Pi Zero W and a camera module. A demo of Roomberry's capabilities as well as the web interface developed to interact with the robot can be seen in the following video:
To build this project you will need:
- A mini DIN 7 male connector (DIN 8 is compatible too) with Roomba's pin 3 (RxD), 4 (TxD) and 5 (BRC).
- A compatible Roomba (series 600/700/800) adapted to provide a regulated 5 V power source direct from the battery using an step-down (Pololu D24V5F5 is a good option).
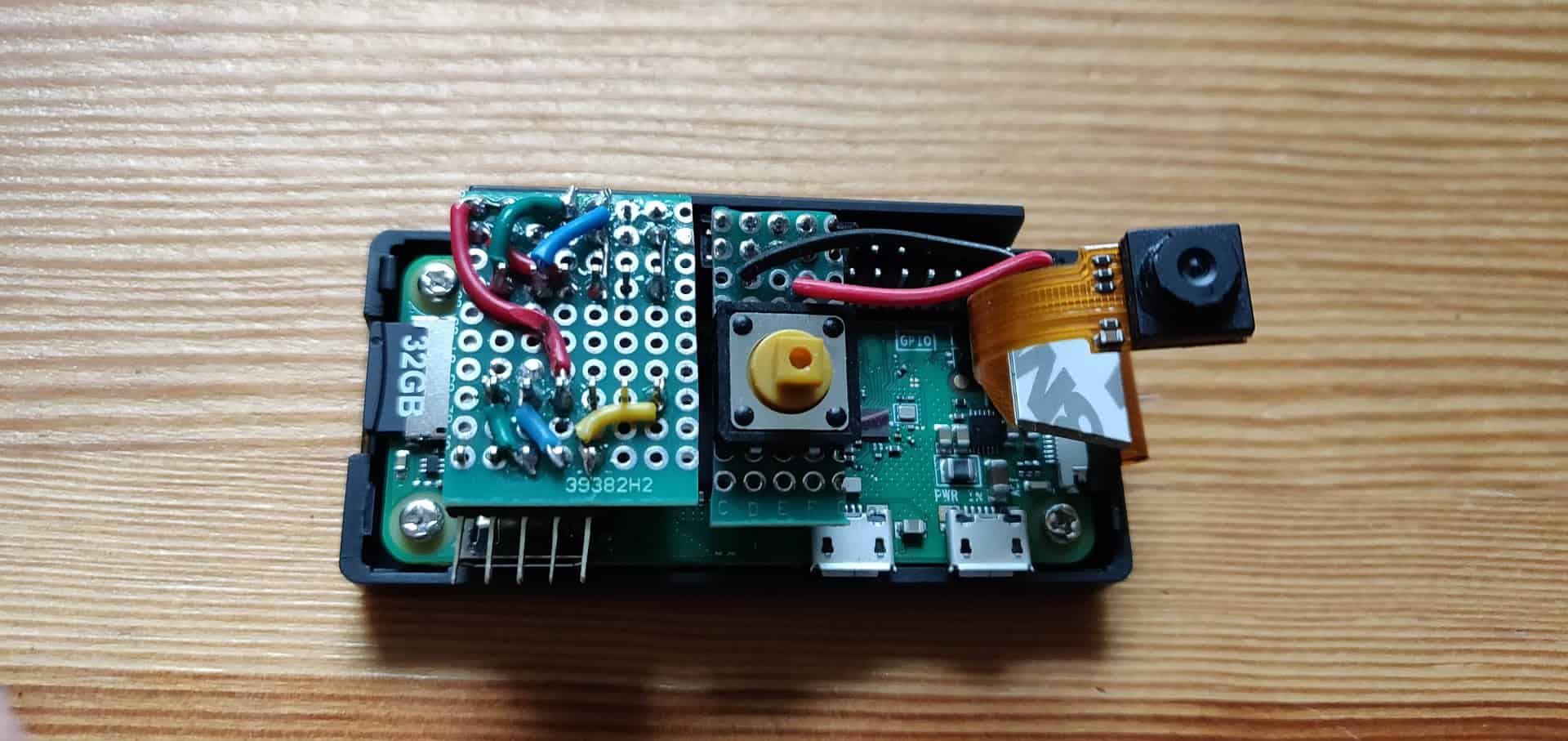
- A Raspberry Pi Zero W with Raspbian Stretch Lite version installed. The following software should also be installed: pyserial library, picamera package and an adapted version of Matthew Witherwax' Python iRobot library.
- A Raspberry camera module (I used Version 1).
- A HAT (Hardware Attached on Top) board to connect Raspberry's GPIO with a Logical Level Converter (Roomba's Serial is 5 V compatible but Raspberry uses 3.3 V).

Roomberry.py creates a multithreading python web server that interacts with Roomba and the camera module installed. This code is intended to run as a daemon and handles the HTTP GET Requests performed against the Raspberry Pi.
To install it just download the last release and configure it as a service:
wget https://github.com/danimaciasperea/Roomberry/archive/1.0.0.tar.gz -P /tmp/
tar -xvf /tmp/1.0.0.tar.gz -C /tmp/
# Before doing next step, adapt the code to your environment (serial port used, IFTTT Key, etc.)
sudo cp /tmp/Roomberry-1.0.0/roomberry/roomberry.py /usr/local/bin/
sudo cp /tmp/Roomberry-1.0.0/roomberry/roomberry.service /lib/systemd/system/
sudo systemctl enable roomberry.service
sudo system roomberry start
The commands sent to the robot are encoded in the request's URL query string. The URL path should start with cam or roomba depending on the device that will execute the operation. If the command needs one or more parameters, they should be just passed as a field-value pair in the query string.
For instance:
#Send a clean command to Roomba
curl roomberry/roomba/?op=clean
#Drive Roomba straight at 20 mm/s
curl roomberry/roomba/?op=drive&velocity=20&radius=32768
#Set camera saturation to 65
curl roomberry/cam/?op=cam&saturation=65
#Download picture taken the 10th 08 2018 at 10:28:49
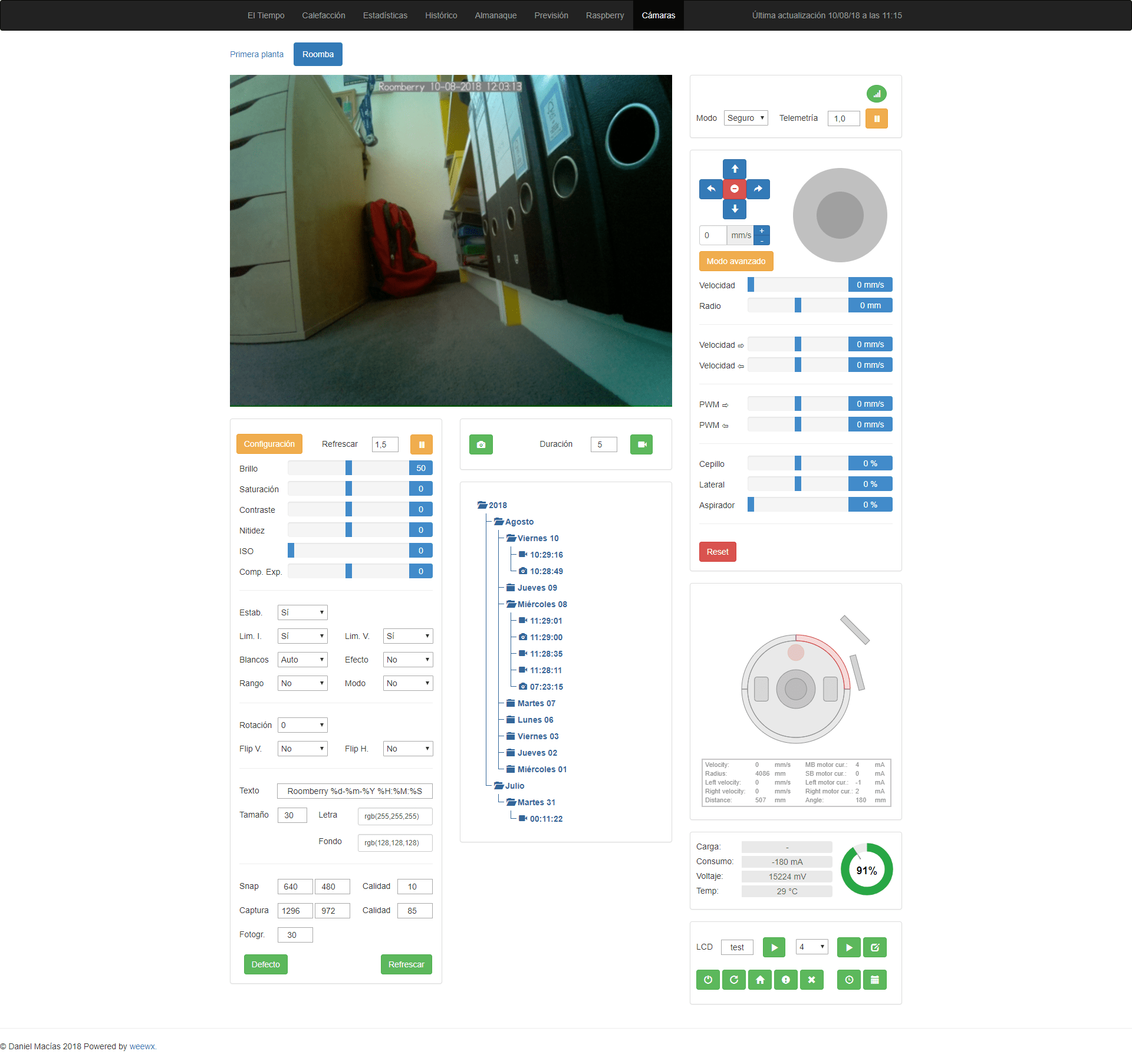
wget roomberry/cam/20180810/20180810-102849.jpgTo use the web interface you will need a Raspberry running apache2 with PHP enabled. Just deploy the web-application on the web server path. For instance:
sudo cp -R /tmp/Roomberry-1.0.0/web-app/ /var/www/It has been designed using Bootstrap framework (HTML5 and Javascript with AJAX requests). You will probably need to adapt the HTML code to your particular needs/environment.
Find the complete instructions on how to build this project in the following post.
This project is licensed under the MIT License - see the license file for details
Roomba is a trademark of iRobot Corporation. All other trademarks are the property of their respective owners.