ROS package (tested in ROS Kinetic) for sending a mission via MavLINK to an aerial vehicle with a PX4 or an ArduPilot autopilot system. It is also able to auto remove failsafes, arm the motors, enter Mission mode and complete the mission autonomously.
Test with a simulated PX4 fixed-wing aircraft in this video:
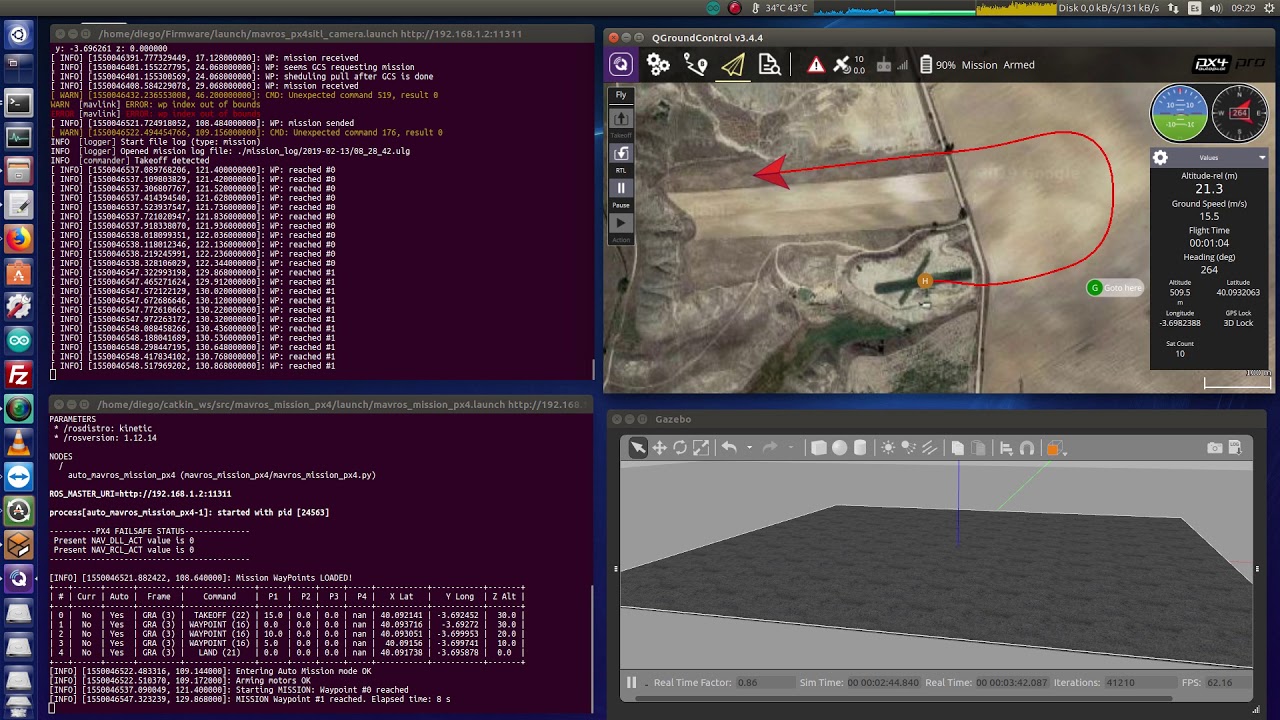
Besides ROS, both MavROS and PX4 Firmware must be installed
- Update your takeoff location via environment variables as explained here. For the RC airfield in the video, the coordinates are:
export PX4_HOME_LAT=40.091754
export PX4_HOME_LON=-3.695714- Launch PX4 and MavROS:
roslaunch px4 mavros_posix_sitl.launch
- Launch mavros_auto_mission:
roslaunch mavros_auto_mission mavros_mission_px4.launch
-
Connect to the real ArduPilot (Copter, Plane or Rover) via MavLink using a telemetry radio (3DR or similar).
-
Launch mavros_auto_mission:
roslaunch mavros_auto_mission mavros_mission_apm.launch