{kind=link}
MATLAB-based simulator for mobile robot motion and navigation controller design.
Sim.I.Am-20 is an open-source MATLAB-based mobile robot simulator for designing and implementing motion and navigation controllers. This program is based on the Sim.I.am by Georgia Tech's GritsLab. Updated to run on MATLAB R2020a and above.
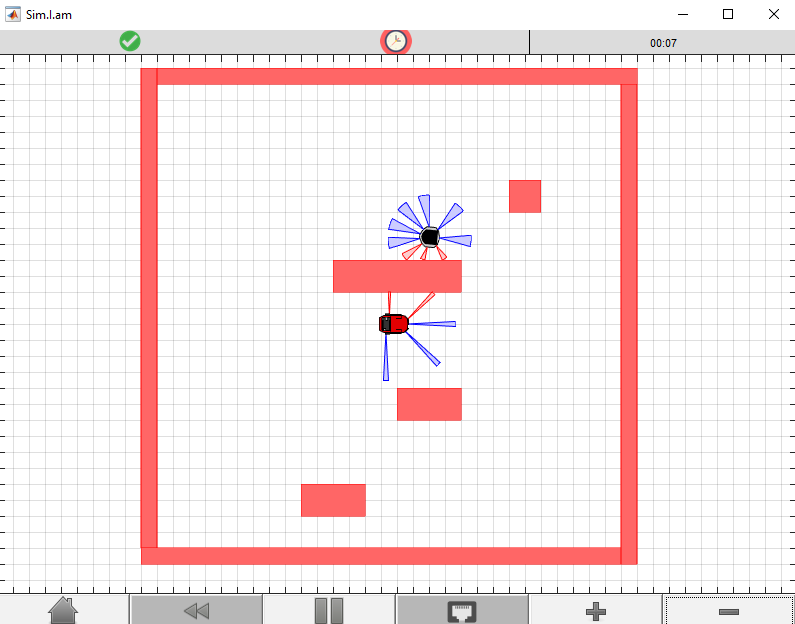
The MATLAB app is a demo of a multi-agent application, where one robot follows the other robot through a cluttered environment as shown in the screenshot below. A manual is included to help learn how to get started with the simulator. It provides as set of programming exercises focused on how to implement the mobile robot navigation system found in the app from scratch.
Sim.I.Am is maintained by the Georgia Robotics and InTelligent (GRITS) Laboratory at the Georgia Institute of Technology. The official project page is located at http://gritslab.gatech.edu/projects/robot-simulator.
This app was originally developed by Jean-Pierre de la Croix. Support for MATLAB 2014b and later was added by Sayan Seth.
It was later found that this version is not supported by MATLAB 2020a and later (some say since MATLAB 2019a). In this repo, I aim to add support for at least MATLAB 2020a and later. It should also work with MATLAB 2019.
- MATLAB R2020a or later
- Simulink
Feel free to contribute and do a PR to this project. If you find some issues or bugs regarding this application, drop them here. You can also request new features.