A ROS node for the MocapNET 3D Pose Estimator
Please only use this issues page for issues with the ROS wrapper, the main development repository of MocapNET is here
Step 0 : Install ROS
Step 1 : Create your Workspace
Step 2 :
cd your/work/space/path/here
cd src/
git clone https://github.com/FORTH-ModelBasedTracker/mocapnet_rosnode
cd mocapnet_rosnode/
./initialize.sh
cd ../../build
cmake ..
make
Step 3 :
cd your/work/space/path/here
source devel/setup.bash
roslaunch mocapnet_rosnode mocapnet_rosnode.launch
Feel free to make your own ros launcher by using the default mocapnet_rosnode.launch as a template to use your cameras and TF Root.
The default settings are /camera/rgb/image_rect_color for the RGB image topic, /camera/rgb/camera_info for the camera calibration and map as the TF root.
You can download this sample rosbag to take a look on the TF tree by using rosbag play doc/sample.bag --loop
Step 4 (Optional): If you don't have your own ROS package to acquire RGB input you can use the bundled camera acquisition software by executing the following instructions
cd your/work/space/path/here
source devel/setup.bash
src/mocapnet_rosnode/scripts/createAcquisition.sh
catkin_make
This will create a link to the rgbd_acquisition ROSNode in your workspace and allow you to stream your webcam (/dev/video0) using
roslaunch rgbd_acquisition rgb_acquisition.launch moduleID:=V4L2 deviceID:=/dev/video0 width:=640 height:=480 framerate:=30
You can control the camera position and roll pitch yaw to match your TF tree. The default settings are the following :
rosservice call /mocapnet_rosnode/setCameraXPosition "value: 0.0"
rosservice call /mocapnet_rosnode/setCameraYPosition "value: 0.0"
rosservice call /mocapnet_rosnode/setCameraZPosition "value: 0.0"
rosservice call /mocapnet_rosnode/setCameraRoll "value: 90.0"
rosservice call /mocapnet_rosnode/setCameraPitch "value: 0.0"
rosservice call /mocapnet_rosnode/setCameraYaw "value: 0.0"
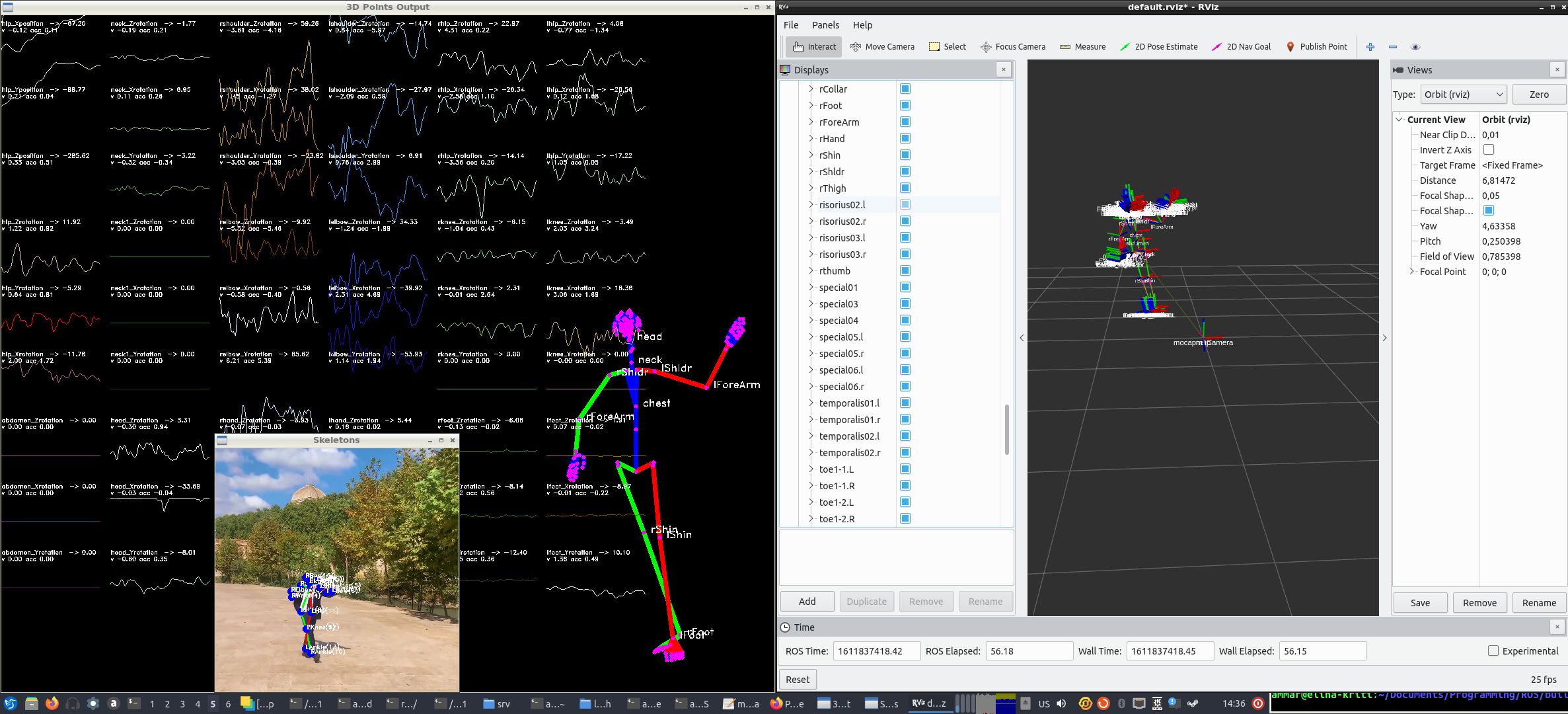
If you want immediate access to the euler angles of the BVH frame internally populated by MocapNET you can access them using the rostopic /mocapnet_rosnode/bvhFrame
Running:
rostopic echo /mocapnet_rosnode/bvhFrame
Will yield 498 element arrays encoding the full 3D human skeleton, to interpret the vectors in your program you can use the enum MOCAPNET_Output_Joints, for example element 318 encodes left elbow z rotation as understood by the label MOCAPNET_OUTPUT_LELBOW_ZROTATION,//318. Copying the whole vector as a motion record on this bvh file yields a valid BVH file.
data: [-9.512088775634766, -4.7546868324279785, -288.34246826171875, 27.72639274597168, -0.3889874815940857, -20.50408363342285, 0.0, 0.0, 0.0, 15.126297950744629, 12.259260177612305, 15.964614868164062, -5.329497337341309, 5.251098155975342, -7.2560014724731445, 0.0, 0.0, 0.0, 2.8856470584869385, -32.6014404296875, -9.461994171142578, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 63.49156188964844, 32.619571685791016, 7.534119606018066, -12.211994171142578, -9.794024467468262, 22.890546798706055, -3.2917959690093994, -4.926611423492432, -5.74922513961792, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -81.3495101928711, 69.02851867675781, 1.6789360046386719, 18.163463592529297, -16.729158401489258, -33.58930587768555, 3.7542624473571777, 3.836533308029175, 0.9339077472686768, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.606363296508789, -10.068902969360352, 7.630038738250732, -1.881280541419983, 3.910395860671997, -6.197346351655142e-07, -5.114427089691162, -9.173490524291992, -10.093374252319336, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 8.7712984085083, -3.146512269973755, -25.90770721435547, 7.954533100128174, 27.014575958251953, 2.2015790079876751e-07, 1.4231140613555908, -8.588176727294922, 4.44589376449585, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
By default the 2D joint estimator used is forth and is best suited for realtime execution and decent 2D pose estimation accuracy. If you have a beefy GPU you can change the "joint2DEstimator" launch parameter to vnect or openpose for higher accuracy at slower speeds.
Please note that camera movement is "encoded" as skeleton movement so usage of a static camera should be ok, however if using a moving camera you should disable the publishCameraTF ROS parameter and publish your own "mocapnetCamera" tf2:transform.
Good luck!