Minimal implementations for personally interesting ideas & algorithms that can be useful for robotics applications, in C/C++.
- Gauss-Newton curve fitting
- Ceres curve fitting
- g2o Unary Edge: Graph curve fitting
- g2o Binary Edge: 1D robot localization
- Kalman Filter
- Extended Kalman Filter
- Auto-tuning EKF with Ground Truth
- Unscented Kalman Filter
- Particle filter
- ICP
- Homography
- Optical Flow (Sparse)
- Indirect Monocular Visual Odometry: Feature Matching
- Indirect Monocular Visual Odometry: Feature Tracking
- Stereo Vision Depth Estimation
- Direct Monocular Visual Odometry
- Direct with GPU
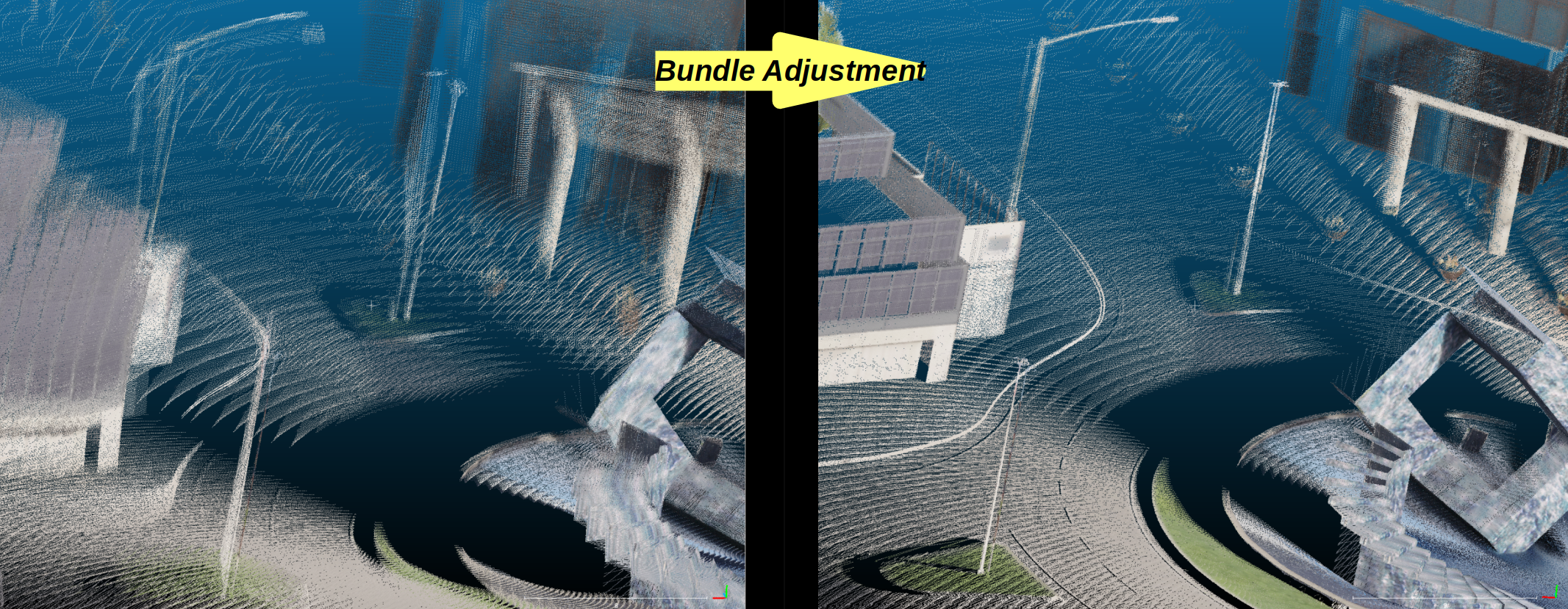
- Structure from Motion with Bundle Adjustment
- Graph-Slam with Odometry and Landmark Constraints
- Structure from Motion with Pose Graph Optimization
- Dense Reconstruction via Multi-View Stereo
- Factor graph object tracking
- 2D Occupancy Grid From 3D lidar
- 3D Voxel Occupancy Grid (static and dynamic)
- 3D signed distance field (euclidean and truncated)
- Single & Multi object tracking
- Optimal Assignment (hungarian algo)
- Ant colony optimization